
Fターム[2F129BB49]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | マップマッチング (2,282)
Fターム[2F129BB49]の下位に属するFターム
パターンマッチング (131)
投影法 (42)
上下判定 (41)
車線・道路幅データの利用 (62)
Fターム[2F129BB49]に分類される特許
341 - 360 / 2,006
車両経路案内装置及び車両経路案内システム
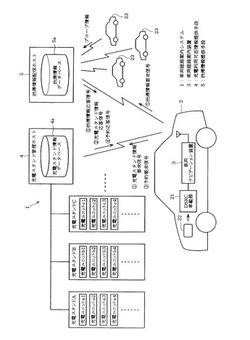
【課題】車両の現在位置からバッテリを充電可能な充電スタンドまでの最適な経路を乗員に知らせる。
【解決手段】車両ナビゲーション装置3は、充電スタンド管理ホスト4から受信した充電利用可否情報に基づいてバッテリを充電可能な充電ユニットが属する充電スタンドを特定して乗員に対して通知し、乗員による充電予約操作を受付けると、乗員が指定した充電スタンドを目的地として設定し、車両の現在位置から目的地である充電スタンドまでの経路を渋滞情報配信ホスト5から受信した渋滞情報に基づいて渋滞区間を回避するように探索して表示する。
(もっと読む)
ナビゲーション装置

【課題】長距離にわたって脱出が困難な誘導経路上の区間に自車が進入することをユーザに事前に把握させることができる「ナビゲーション装置」を提供すること。
【解決手段】経路誘導中に、誘導経路からの脱出が可能な自車位置に対する進行方向前方側の直近の脱出可能地点において、自車が所定の距離以上にわたって脱出が困難とみなされる誘導経路上の特定の経路区間に進入するか否かを判定する進入判定手段25と、この進入判定手段25によって肯定的な判定結果が得られた場合に、自車が特定の経路区間に進入する旨の警告を出力する警告出力手段26とを備えたこと。
(もっと読む)
車両用対象物画像認識装置、車両用対象物画像認識方法及びコンピュータプログラム
【課題】従来より簡易な処理によって画像認識処理を実行することを可能とした車両用対象物画像認識装置、車両用対象物画像認識方法及びコンピュータプログラムを提供する。
【解決手段】バックカメラにより撮像された撮像画像中に含まれる対象オブジェクトのバックカメラの光軸方向に対する相対角度(対象相対角度)を検出し(S5)、同じく、バックカメラにより撮像された撮像画像中に含まれる基準オブジェクトのバックカメラの光軸方向に対する相対角度(基準相対角度)を検出し(S7)、検出された基準相対角度と対象相対角度とに基づいて、基準オブジェクトに対する対象オブジェクトの相対角度(比較相対角度)を算出し(S9)、算出された比較相対角度を対象オブジェクトに対応づけてオブジェクトDBに記憶し、オブジェクトDBを作成する(S10)ように構成する。
(もっと読む)
地図更新データ供給装置及び地図更新データ供給プログラム
【課題】道路ネットワークの保障を行うと共に最新の地図更新データをデータ量を低減して供給する地図更新データ供給装置を提供する。
【解決手段】更新要求に基づき、要求更新区画及び最新バージョンの上書更新用の上書更新データファイルMcを抽出する要求更新データ抽出手段10と、隣接する区画のネットワーク保証を行う保障更新区画及び更新保障バージョンまでの差分更新データファイルMaを抽出する保障更新データ抽出手段11と、を備え、抽出したデータファイルをナビゲーション装置に供給する地図更新データ供給装置1。
(もっと読む)
移動体の旋回角度・方位・位置を検出するシステムおよび方法
【課題】 移動体の旋回角度および方位を検出するシステムを提供する。
【解決手段】
移動体には、所定の走査角度範囲にわたって周囲の対象物までの距離データを生成する距離計が搭載されている。検出システムは、フーリエ変換手段25と、旋回角度演算手段28と、方位演算手段29を備えている。フーリエ変換手段25は、上記距離データ又はこの距離データに基づき演算された上記周囲対象物の二次元マップデータを、空間周波数領域においてフーリエ変換する。旋回角度演算手段28は、移動体が第1の方位から第2の方位へと旋回する際に、上記第1の方位での上記フーリエ変換データの所定次数の成分例えば三次成分と、上記第2の方位での上記フーリエ変換データの三次成分の位相差に基づき、移動体の旋回角度を演算する。方位演算手段29は、検出された旋回角度と既知の第1の方位に基づき、移動体の第2の方位を演算する。
(もっと読む)
通信システムおよびデータセンタ
【課題】複数の経路探索方法から1つを選択して使用する技術において、アルゴリズムの選択規則を、より道路の実状を反映した信頼性の高いものにする。
【解決手段】複数のユーザIDのそれぞれに対応する車両の出発から到着までの走行履歴から成るレコードを複数レコード分記録するデータセンタ2が、ユーザ端末4から送信されたエリアとユーザIDを受信し、ユーザIDに対応するユーザ走行リストから、当該エリア内に出発地点および到着地点を有するレコードを抽出し、抽出したレコードのそれぞれを対象として、全ユーザ走行リスト中の全レコードのうち、対象レコードの出発地点および到着地点をこの順に最も速く走行するレコードのルート(最速ルート)を特定し、その最速ルートを実現する経路探索アルゴリズムの探索パラメータを算出し、算出した探索パラメータのうち1つを、最適パラメータとする。
(もっと読む)
ナビゲーション装置及び右折支援方法
【課題】
設定経路において右折すべき交差点における右折待機を行う際に、適切な運転操作のための誘導を行う。
【解決手段】
車両CRが右折をすべき交差点に近づくと、位置関係算出手段720が、撮影手段710による撮影結果に基づいて、車両CRとセンターラインとの距離及び角度を算出する。また、車両CRが当該交差点に進入すると、位置関係算出手段720が、撮影手段710による撮影結果に基づいて、車両CRとセンターマークとの距離を算出する。こうして算出された位置関係情報に基づいて、誘導情報生成手段740が、車両CRをセンターラインに近づけるとともに、車両CRをセンターラインと平行にするための音声誘導情報の生成、及び、車両CRをセンターマークに近づけるための音声誘導情報の生成を行う。そして、生成された音声誘導情報に基づく誘導音声が、音声出力手段750から出力される。
(もっと読む)
警告音出力装置
【課題】歩行者に対する警告を行いつつ、歩行者以外の人への不快感を低減する。
【解決手段】車両の進行方向より左側へ向けて警告音を出力するように配置された左側スピーカ16Lと、車両の進行方向より右側へ向けて警告音を出力するように配置された右側スピーカ16Rを備え、車両の現在位置および道路地図データに基づいて車両の走行道路が双方向通行道路であることを判定(S104でNOと判定)した場合、右側スピーカ16Rより警告音を出力させないようにし、左側スピーカ16Lより警告音を出力させる。
(もっと読む)
ナビゲーションシステム、経路探索サーバ、ナビゲーション装置およびナビゲーション方法
【課題】車両が行政区画境界に接近したこととともに、接近した新たな行政区画の名称を予めユーザに報知することができるナビゲーションシステムを提供する。
【解決手段】行政区画データは、各行政区画のエリアを示すポリゴンと、少なくとも行政区画名称を有し、経路探索サーバ30は、推定位置算出手段37と行政区画判別手段38を備え、推定位置算出手段は、予め設定された所定の閾値距離と端末装置20の現在位置に基づいて、端末装置20が移動中の経路上における前記閾値距離だけ前方の推定位置を算出し、行政区画判別手段36は、現在位置が属する行政区画データと推定位置が属する行政区画データとを取得して行政区画が一致するか否かを判別し、行政区画判別手段36が前記行政区画の不一致を判別した場合、行政区画の境界が接近していることを、推定位置が属する行政区画名称とともに端末装置20に報知する。
(もっと読む)
ナビゲーション装置
【課題】下位の階層での経路探索をより適切に行なうことのできるナビゲーション装置を提供する。
【解決手段】経路探索部43は、上位のレイヤHnで探索した中間経路Rmnと最短直線Lとで囲まれる領域である再探索要否判断用領域の面積Snを算出し、再探索要否判断用領域の面積Snが所定の基準値Sthn以上である場合に、下位のレイヤHn+1にて中間経路Rmn+1を再探索する。また、所定の基準値Sthnとして、交点C10及びC20間の距離交点間の距離を直径とする半円の面積を採用する。
(もっと読む)
車両用運転支援装置
【課題】駐車区域において、進入路および退出路のうちの少なくともいずれかを走行している場合に限って逆走の警告を行うことを、より容易に可能にする車両用運転支援装置を提供する。
【解決手段】マップマッチング処理でマッチングした場所が、SAPA内の道路に該当していた場合に、位置検出器11で検出した自車両の現在位置をもとに、自車両が走行中の可能性があるSAPAセグメントを取得する。そして、当該SAPAセグメントのネットワークを前後に辿り、探索距離内に本線セグメントが存在するか否かを判定し、探索距離内に本線セグメントが存在すると判定したこと、および位置検出器11で検出した自車両の進行方向に基づいて、自車両が逆走状態であることを判断し、逆走の警告を行う。
(もっと読む)
移動端末、処理装置及びプログラム
【課題】現在位置の取得精度を維持しつつ、省電力化を図る。
【解決手段】絶対位置取得部30が、歩き始めの地点、歩き始めの地点から一定距離L1だけ離れた地点、及び一定距離L2だけ離れた地点で端末本体10の絶対位置を取得し、現在位置取得部36が、当該絶対位置を用いて歩行経路補正部35により補正された歩行経路に基づいて、端末本体の現在位置を取得する。この場合、一定距離L1は、端末本体が移動する2点間の実際の方位と、当該2点において絶対位置取得部により取得される絶対位置から求められる2点間の方位との最大角度差が、所定範囲内となる2点間の距離であり、一定距離2は、端末本体が移動する2点間の実際の距離と、当該2点において絶対位置取得部により取得される絶対位置から求められる2点間の距離との最大距離差の実際の距離に対する割合が、所定範囲内となる2点間の距離とされている。
(もっと読む)
ナビゲーション装置および経路探索方法
【課題】枝狩りをしながら経路探索を行うアルゴリズムにおいて、特殊交通規制が存在したとしても真の最適経路を算出可能な「ナビゲーション装置および経路探索方法」を提供する。
【解決手段】探索枝を伸ばしていく過程で特殊交通規制情報を検出した場合、当該特殊交通規制が設定されているリンクにおいて枝狩りを行わずに探索枝を伸ばしたルートも含めて経路探索を行うようにすることにより、特殊交通規制が存在するために最適経路としては絶対に選択されることがないルートを構成するリンクにおいて複数のルートの累積コストを比較した結果、特殊交通規制の設定されていないルートの方が累積コストが高くて枝狩りされてしまうようなケースであっても、当該特殊交通規制のないルートも含めて探索枝を伸ばしながら経路探索を行うことができるようにする。
(もっと読む)
運転状態評価装置および運転状態評価システム
【課題】判定した道路種別に応じて運転診断に用いるための閾値を設定する場合において、ドライバに対しての評価を下げる誤診断を生じさせるような道路種別の誤判定を防ぐことを可能にする。
【解決手段】位置検出器11で検出した自車両の現在位置と記憶媒体17に記憶されている地図データとをもとに、自車両の走行中の道路を特定し、当該道路が高速道路と一般道路とのうちのいずれであるのかを逐次判定する位置情報依存トリガ生成部61cと、ETCゲートを自車両が通過したことを検出した場合に、自車両の走行中の道路が高速道路であると判定するETC情報依存トリガ生成部61aと、位置情報依存トリガ生成部61cでの判定結果とETC情報依存トリガ生成部61aでの判定結果とをもとに、自車両の走行中の道路が高速道路であるか一般道路であるかを決定する道路種別決定部62と、を備える。
(もっと読む)
ナビゲーション装置および施設案内方法
【課題】対向車線側に位置する施設への到達を助ける案内を行う技術を提供する。
【解決手段】ナビゲーション装置は、経路を構成する道路の対向車線側の道路に沿って位置する施設を特定し、特定された施設が沿って位置する対向車線側の道路が横断可能であるか否かを判定し、対向車線側の道路が横断可能であると判定された場合に、施設に道路の横断により到達可能であることを示す情報を出力する。
(もっと読む)
カーナビゲーションシステム
【課題】省燃費の観点から十分に効果的な経路を探索する。
【解決手段】ナビゲーション装置2は、車両の現在地及び目的地、並びに車体重量のデータを、サーバ3(通信装置17)に対し送信する。サーバ3の制御部6は、ダイクストラ法を用いて、出発地から目的地までのコストが最小となる省燃費を図り得る経路を探索する。このとき、信号頻度が大きい、急カーブの数が多いといった車両が加速(発進)、減速(停止)を行う度合が大きくなる特定道路は、それ以外の普通道路(基準値)に比べてコストが大きく、且つ、車体重量が大きいほどコストが大きくなるよう変更される。
(もっと読む)
報知装置、表示装置、ナビゲーション装置、車両用音響装置
【課題】低コストで車両のヘッドライトの点灯し忘れを抑制できる車両用の報知装置、表示装置、ナビゲーション装置、車両用音響装置を提供する。
【解決手段】計時装置120によって現在時刻を算出し、CPU101において現在時刻が車両のヘッドライト点灯が必要な期間に属すると判断されると、LCD105やスピーカ106から車両の乗員に向けてライトの点灯を促す表示や音出力を実行する。LCD105やスピーカ106は、ナビゲーション装置や車両用音響装置の表示部や音声出力部としてもよい。
(もっと読む)
車載器
【課題】FM多重放送によって送信される道路交通情報の受信ができない場合に、ユーザにとっての快適性および利便性をより向上させることを可能にする車載器を提供する。
【解決手段】FM多重放送が受信可能な受信エリアの情報および受信エリアごとの停波時間帯の情報を外部メモリ18に予め可能しておく。続いて、外部メモリ18に格納されている受信エリアの情報と位置検出器11で検出した自車両の現在位置の情報とをもとに、自車両が受信エリア内にいるか否かを判定するとともに、外部メモリ18に格納されている停波時間帯の情報とGPS受信機15で検出した現在時刻の情報とをもとに、現在が当該受信エリアの停波時間帯であるか否かを判定し、これらの判定結果に基づいて、交通情報を受信できていない原因を判断する。そして、判断した原因を表示装置19や音声出力装置20によって提示する。
(もっと読む)
走行支援装置、方法およびプログラム
【課題】走行安定性を低下させることなく目標位置において目標車速以下となるように走行支援を行うこと。
【解決手段】車両の前方に存在する目標位置および当該目標位置における目標車速を示す情報を取得し、前記車両の前方に存在する路面の摩擦度合が所定の基準より小さい低摩擦区間の長さを示す情報を取得し、前記車両の現在位置と前記目標位置との間に前記低摩擦区間が存在する場合、前記車両の現在位置と前記目標位置との間に前記低摩擦区間が存在しない場合に前記目標位置において車速を前記目標車速以下にさせる走行支援を行う際の走行支援開始位置よりも、前記低摩擦区間の長さだけ車両側の位置から前記走行支援を開始するとともに、前記低摩擦区間においては前記走行支援を中断する。
(もっと読む)
車載装置とその経路探索方法
【課題】 本発明の目的は、使用者が走行の可否を判断しなければならない場面をより少なくするナビゲーション技術を提供することにある。
【解決手段】
本発明の車載装置は、規制ごとに、規制の対象となる車両の条件を特定する情報と、規制が実施される地域を特定する情報と、を含む規制情報を格納する記憶手段と、目的地の指定を受け付ける目的地受付手段と、自車が規制ごとに対象となる車両の条件を満たすか否かを判定する規制判定手段と、規制判定手段により規制の対象となる車両の条件を満たすと判定した規制について、規制が実施される地域を特定する情報により特定される地域に含まれる道路を特定する規制道路特定手段と、目的地受付手段により受け付けた目的地に到る経路を、規制道路特定手段により特定された道路を回避して探索する回避経路探索手段と、を実施することを特徴とする。
(もっと読む)
341 - 360 / 2,006
[ Back to top ]