
Fターム[2F129BB49]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | マップマッチング (2,282)
Fターム[2F129BB49]の下位に属するFターム
パターンマッチング (131)
投影法 (42)
上下判定 (41)
車線・道路幅データの利用 (62)
Fターム[2F129BB49]に分類される特許
61 - 80 / 2,006
車両用制御装置
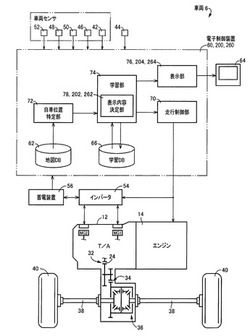
【課題】どのような車両操作により所定の走行制御が実行され易くなるかということを把握できる情報を提示することができる車両用制御装置を提供する。
【解決手段】表示部76は、走行データが蓄積された履歴情報DThisから現在の車両状態に基づいて、惰性走行制御(所定の走行制御)が実行されると予測されるということを、車両6の現在位置を基準とした所定範囲内の走行路に関連付けて表示装置64に表示する。従って、運転者が現在の車両状態を変化させれば、惰性走行制御が実行されると予測される走行路が変化して表示されるので、電子制御装置60は、どのような車両操作により惰性走行制御が実行され易くなるかということを把握できる情報を、運転者に対して提示することができる。そうなれば、例えば運転者は上記惰性走行制御による燃費向上というメリットを意識的に引き出すように、車両6を走行させることが可能である。
(もっと読む)
施設検索装置

【課題】周辺駐車場を考慮して施設を選択することができる施設検索装置を提供すること。
【解決手段】施設検索装置としてのナビゲーション装置は、設定された検索条件を満たす施設を検索する施設検索部30と、施設検索部30によって検索された施設の周辺の所定範囲に存在する駐車場を検索する駐車場検索部32と、施設検索部30によって検索された施設を特定する施設特定情報を表示する際に、駐車場検索部32による検索結果に基づいて、少なくともこの施設の周辺に存在する駐車場の有無が含まれる駐車場情報を表示する施設情報描画部34、表示処理部60とを備えている。
(もっと読む)
ナビゲーション装置とその施設検索方法
【課題】 本発明の目的は、類似の施設の重複を整理して、よりスムーズに目的地等の候補を提示するナビゲーション技術を提供することにある。
【解決手段】
本発明に係るナビゲーション装置は、施設の検索を行う際の検索条件の指定を受け付ける検索条件指定受付手段と、前記検索条件を満たす施設の検索を行う施設検索手段と、検索した前記施設を所定の順に並べて選択可能に表示する検索結果表示手段と、を備え、前記検索結果表示手段は、前記検索条件を満たす施設のうち、上位の順番に表示される施設と類似する施設の重複を除外して表示する、ことを特徴とする。
(もっと読む)
地図情報生成システム
【課題】新規道路を高精度に検出することが可能な地図情報生成システムを提供する。
【解決手段】車両が新規走行路を走行した場合に、この走行路を走行した回数である走行数A、及びこの新規走行路を車両が走行したときにエンジンを停止した走行回数であるオフ回数Bを求める。そして、これらの比率であるエンジン停止比率「B/A」を算出し、このエンジン停止比率が下限閾値よりも低い場合には新規走行路は新規道路であると判定し、エンジン停止比率が上限閾値よりも高い場合には新規走行路は駐車場であるものと判定する。その結果、新規道路であるか駐車場であるかの判断をより正確に判別することができ、高精度な地図データの生成が可能となる。
(もっと読む)
ナビゲーション装置
【課題】CPUの再起動後、より短い時間でルート誘導を開始することができるナビゲーション装置を提供することを目的とする。
【解決手段】車両電源30のメイン電源32にCPU11を接続するとともに、車両電源30のバックアップ電源31に情報処理部15及び車両移動検出部20を接続し、メイン電源32からの電源供給が中止されているCPU11の休止状態中は、車両移動検出部20からのデータを情報処理部15の記憶部16に記憶し、メイン電源32からの電源供給が再開された際に、記憶部16に記憶されたデータに基づいて車両の現在位置を算出することを特徴とする。
(もっと読む)
交通情報表示装置および交通情報表示方法
【課題】視認性を高く保ちつつ、必要な交通情報を表示することができる交通情報表示装置20を提供する。
【解決手段】本発明の交通情報表示装置20は、車両14がこの先走行する可能性の高い道路を本線として推定し、推定した本線上において、車両14の現在位置から走行方向に、予め定められた距離である表示距離分離れた地点を本線終点として特定する本線計算部24と、車両14の現在位置から本線終点までの間の本線上の交差点を特定すると共に、特定した交差点に接続している道路を支線として特定し、特定し支線上において、車両14の現在位置から表示距離分離れた地点を支線終点として特定する支線計算部25と、本線上および支線上のそれぞれにおいて、車両14の現在位置から、本線終点および支線終点までの走行方向の交通情報を、表示装置203に表示させる表示制御部26とを備える。
(もっと読む)
ナビゲーション装置
【課題】所定量のバッテリ残量が残るように充電区間を通過する経路を探索する。
【解決手段】ナビゲーション装置は、現在地から目的地までの経路であって、移動体が走行しながら充電可能な充電区間に対応する充電リンクを少なくとも一以上通過し、当該経路を前記移動体が走行した場合の予測される前記目的地への到着時の予測バッテリ残量が設定された目標バッテリ残量以上である経路を探索する。
(もっと読む)
鉄道車両の位置検出装置および位置検出方法
【課題】駅構内のように分岐線の間隔が狭くしかもGPS計測機の精度が低い場合でも、どの分岐線に入ったかを精度良く検出し得る鉄道車両の位置検出装置を提供する。
【解決手段】GPS計測機33で求められた車両Hの概略位置を入力すると共に移動距離を算出する距離算出部21と、データ取得部22で取得された車両Hの角速度ω及び角加速度ω´を入力して進行方向をファジィ推論により推定する進行方向推定部23と、距離算出部21からの移動距離及びGPS計測機33からの概略位置を入力し且つ進行方向推定部23から進行方向を入力して分岐点を推定する分岐点推定部25と、この推定分岐点、車両Hの角速度及び速度を入力してニューラルネット手法により車両Hが走行している分岐線番を検出する分岐線番検出部26と、この検出された分岐番線及び推定分岐点を入力し予め備えられた線路情報に合致するか否かを照合する分岐点照合部27とを具備したもの。
(もっと読む)
情報提供サーバ、車載搭載情報提示装置、及び情報提供方法
【課題】運転者に応じた、より精度の高い情報提供を可能とする。
【解決手段】対象とする車両からの要求に応じて、その対象とする車両の位置から提供する施設の候補を抽出し、対象とする車両の運転特性と同一若しくは近似した車両の走行情報を参照して、上記抽出した施設への到着予測時刻を算出する。そして、その算出した到着予測時刻が対応する施設の時間制約条件を満足した施設の情報を、要求元に提示する。
(もっと読む)
車両警告装置および車両警告方法
【課題】車両を動かす方向の間違いをより確実に防止することができる。
【解決手段】車両の移動方向を示す駆動ステータスを検出する検出手段と、車両が停車する前の移動方向を示す駆動ステータスと、停車後に検出した駆動ステータスと、が一致する場合に所定の警告を出力する警告手段と、を備える。
(もっと読む)
経路比較装置、経路比較方法、及びプログラム
【課題】経路情報のデータ構造や格納方式が異なる場合であっても、経路同士を比較して一致度合いを算出することができる経路比較装置、経路比較方法、及びプログラムを提供する。
【解決手段】経路比較装置は、スタート地点及びゴール地点の位置情報を取得する地点情報取得部と、上記スタート地点及び上記ゴール地点間のリファレンス経路の形状データを取得するリファレンス経路取得部と、上記スタート地点及び上記ゴール地点間の経路を探索する経路探索部と、上記経路探索部により探索された探索経路の形状データと、上記リファレンス経路の形状データとを比較することにより上記経路間の一致度合いを示すマッチング度を算出するマッチング度算出部と、を有する。
(もっと読む)
エネルギー消費量計算装置とそのエネルギー消費量計算方法
【課題】 本発明の目的は、より簡易な方法で、より高い精度の消費エネルギーの推定を実現することにある。
【解決手段】
所定の区間におけるエネルギー消費量を推定するエネルギー消費量推定手段と、エネルギーを供給するエネルギー供給手段が所定の区間において実際に供給したエネルギー消費実績量を特定するエネルギー消費実績量特定手段と、エネルギー消費量推定手段が推定した所定の区間におけるエネルギー消費量と所定の区間におけるエネルギー消費実績量との差に応じて、エネルギー消費量推定手段が推定した所定の区間のエネルギー消費量を補正するエネルギー消費量補正手段と、エネルギー消費量補正手段により補正した所定の区間のエネルギー消費量を用いてエネルギー供給手段が供給可能なエネルギー量で移動可能な範囲を特定して表示する表示手段と、を備えることを特徴とする。
(もっと読む)
道路推定装置
【課題】 配信されるコアポイントの情報から、地図データの分割領域に対し、処理対象とするコアポイントを適切に選択可能な道路推定装置を提供する。
【解決手段】 対象パーセルの境界の内側で越境直前CPを取得し(S500)、取得されたCPから対象パーセルの境界までの距離を測定する(S510)。そして、境界から越境直前CPまでの距離が所定距離以上となっているか否かを判断する(S520)。ここで所定距離未満であると判断された場合(S520:NO)、対象パーセルの内側の越境直前CPまでを処理対象CPとする(S530)。一方、所定距離以上であると判断された場合(S520:YES)、対象パーセルの内側のCPに加え越境直後CPまでを処理対象CPとする(S540)。
(もっと読む)
旅行時間情報処理装置及び走行経路探索システム
【課題】交通状況の変化後の状態が定常的な状態となる場合であっても統計旅行時間の質を向上させることが可能となる旅行時間情報処理装置及び走行経路探索システムを提供する。
【解決手段】非定常データ記憶部306に記憶した非定常データの交通情報が定常性を有すると判定した場合は、その交通情報を定常データ記憶部305に記憶し、以後においては定常データとして扱うようにしたので、交通状況が変化した場合であっても統計旅行時間の質を向上させることができると共に、質の高い統計旅行時間に基づいて最適な経路情報を推測してナビゲーション装置に対して送信することができる。
(もっと読む)
速度検出装置及び方法
【課題】移動体の速度を自律航法手段により高精度に検出することのできる速度検出装置及び方法を提供する。
【解決手段】移動体が移動する道路の道路属性を特定する道路属性特定手段100、110、180と、前記移動体の移動速度を検出するための異なる複数の自律航法手段100、112、113と、複数の前記自律航法手段100、112、113から、特定された前記道路属性に適合する前記自律航法手段100、112、113を選択する自律航法手段選択手段100と、を備え、選択された前記自律航法手段100、112、113を用いて、前記移動体の移動速度を検出する。
(もっと読む)
再生区間抽出方法、プログラムおよび記憶媒体、並びに再生区間抽出装置および輸送機器搭載装置
【課題】適切なダイジェスト再生を行うことができる。
【解決手段】走行時における各イベントを、イベントの優先度を示す優先情報と共に記憶するイベント記憶ステップと、映像データを取得する映像データ取得ステップと、映像データの中から、イベントに該当する特徴区間を特定する特徴区間特定ステップと、特徴区間に基づいて、映像データから再生区間を抽出する再生区間抽出ステップと、を備え、再生区間抽出ステップは、少なくとも一部が重なる2以上の特徴区間の和集合の区間である特定区間が映像データに存在する場合、当該特定区間内の特徴区間については、最も優先度の高いイベントに該当する特徴区間である代表特徴区間のみに基づいて再生区間を抽出する。
(もっと読む)
移動体位置検出装置
【課題】マップマッチングによる移動体の現在位置の測位を、車両の進行方向を加味しつつ簡便かつ精度よく行えるようにする。
【解決手段】移動体としての車両Vに、道路周辺の物体を検出する物体検出センサ1が設けられる。車両Vの現在位置の測位に先立って、物体検出センサ1によって検出された所定の固定物についての検出データと地図データとをマッチングさせることにより、車両Vの進行方向の補正が行なわれる。補正された後の車両Vの進行方向に基づいて、移動体の現在位置の測位のためのマッチングが行われる。
(もっと読む)
ナビゲーション装置
【課題】ユーザの感覚にマッチした形態で、環状交差点を案内する「ナビゲーション装置」を提供する。
【解決手段】環状交差点へのスムーズな進入/退出のために、道路の方向の環状交差点の周回方向への変化が開始する地点を参照地点として求め、進入路については求めた参照地点から対象環状交差点の中心Oに向かう方向を道路方向として算出し、退出路については対象環状交差点の中心Oから求めた参照地点に向かう方向を道路方向として算出する。そして、各退出路の退出路方向を、進入路の道路方向を上方向としたときの方向として算出し、算出した退出路方向を各退出路方向として環状交差点の通過方向を案内する。
(もっと読む)
移動体位置検出装置
【課題】移動体の進行方向を、簡便な手法によって精度よく検出することができるようにする。
【解決手段】物体検出センサ1によって、移動体としての車両V周囲の物体が検出される。GPS3によって、誤差を含んだおおまかな車両Vの位置、方位が測位される。地図データ4と物体検出センサ1で検出された検出データとを、直交座標系を用いてマッチングさせて、車両Vの現在位置の測位が行われる。車両Vの位置を原点とする極座標系を用いて、地図データと検出データとをマッチングさせて、車両Vの進行方向が決定される。
(もっと読む)
移動体位置検出装置
【課題】マップマッチングによる移動体の現在位置の測位を、車両のロールあるいはピッチングを加味しつつ簡便かつ精度よく行えるようにする。
【解決手段】移動体としての車両Vに、道路周辺の物体を検出する物体検出センサ1が設けられる。車両Vの現在位置の測位に先立って、物体検出センサ1によって検出された垂直線分を有する固定物を利用して、車両Vのロール角が検出される。また、水平線分を有する固定物を利用して、車両Vのピッチング角が検出される。物体検出センサ1で検出された固定物の位置情報が、決定されたロール角とピッチング角とに基づいて、車両Vが水平状態にあるときの位置情報に変換される(補正)。
(もっと読む)
61 - 80 / 2,006
[ Back to top ]