
Fターム[2F129BB50]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | マップマッチング (2,282) | パターンマッチング (131)
Fターム[2F129BB50]に分類される特許
101 - 120 / 131
車両案内システム及び車両案内方法
【課題】車両を確実に検出することができ、信号の切換えを円滑に行うことができるようにする。
【解決手段】自車の現在地を検出する現在地検出部と、信号機データを取得する信号機データ取得処理手段と、信号機データに基づいて、前方の信号機が感応式信号機であるかどうかを判断する信号機判定処理手段と、前方の信号機が感応式信号機である場合、現在地及び信号機データに基づいて、自車が感知エリア内に停止しているかどうかを判断し、自車が感知エリア内に停止していない場合、自車を感知エリア内に停止させるように感知エリアを運転者に案内する感知エリア案内処理手段とを有する。車両感知センサによって自車を確実に検出することができるので、信号の切換えを円滑に行うことができ、運転者は、信号の切換わりを必要以上に長い時間待たされることがなくなる。
(もっと読む)
自車位置認識装置及び自車位置認識方法

【課題】地物の画像認識結果を用いて自車位置の認識を行うに際して、自車両と地物との間の距離の認識精度を高め、認識率の低下を防止し、地物の全体が一つの画像情報の中に含まれていない場合であっても画像認識を比較的容易に行う。
【解決手段】画像情報Gを取得する画像情報取得手段6と、自車位置情報Sを取得する自車位置情報取得手段5と、自車位置情報Sに基づいて撮像装置14により撮像される対象地物の地物情報Fを取得する地物情報取得手段3と、地物情報Fに基づいて地物種別に応じた複数箇所の測定点の形態情報及び位置情報を含む測定点情報Mを取得する測定点情報取得手段4と、測定点の形態情報に基づいて画像情報Gに含まれている複数箇所の測定点の画像認識を行う画像認識手段7と、画像認識された測定点の画像認識結果と当該測定点の位置情報とに基づいて自車位置情報Sを補正する自車位置補正手段10と、を備える。
(もっと読む)
位置設定装置、位置設定方法、位置設定プログラムおよび記録媒体
【課題】移動体の現在位置の設定を精度よくおこなう。
【解決手段】位置設定装置100は、算出部101、検知部102、取得部103、設定部104によって構成される。算出部101は、移動体の移動状況を計測した計測データに基づいて、移動体の推測位置を算出する。検知部102は、移動体に発生する所定の振動を検知する。取得部103は、所定の振動が発生する地点(以下、「振動発生地点」という)の位置情報を取得する。設定部104は、推測位置と、検知部102の検知結果と、振動発生地点の位置情報と、に基づいて、移動体の現在位置を設定する。設定部104は、たとえば、検知部102によって所定の振動が検知されない場合には、推測位置を移動体の現在位置として設定し、検知部102によって所定の振動が検知された場合には、推測位置周辺に存在する振動発生地点の位置を移動体の現在位置として設定する。
(もっと読む)
車両走行位置推定システム及び車両走行位置推定方法
【課題】マルチパスの影響により計測位置データが誤差を含む場合に、この影響を加味して計測位置データを補正しなくても車両の正確な道路の幅方向の走行位置を推定することができる車両走行位置推定システム及び車両走行位置推定方法を提供する。
【解決手段】通信部403は、路上ビーコン3から通信回線5を介して走行軌跡情報を受信する。走行軌跡解析部404は、走行軌跡解析の処理を実現し、走行軌跡受信情報の計測位置データのばらつきに基づいて、車両100の道路の幅方向の走行位置を推定する。交通情報提供部405は、交通情報提供の処理を実現する。マルチパス判定部406は、リンク−マルチパス対応データ及び車線−ばらつき対応データを作成する。制御部407は、記憶部400、時計部401、GPS処理部402、通信部403、走行軌跡解析部404、交通情報提供部405、マルチパス判定部406の処理を制御する。
(もっと読む)
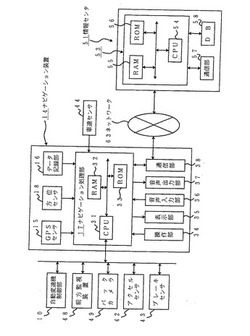
移動体用位置情報取得装置
【課題】自己の現在位置情報を高い精度で取得し、車両制御等に適用する際の信頼性を高める。
【解決手段】自車位置計算部10は、GPSセンサ3、方位センサ4、距離センサ5からの信号に基づいて、自車の実世界における現在位置を測位する。マップマッチング処理部12は、パターンマッチングの手法により自車が走行している道路を推定する。安全制御処理部13は、レーダ7からの検出結果(絶対位置が既知の固定対象物に対する自車の距離)を利用して、推定道路上における自車の存在位置の再度の判断を行って現在位置を特定すると共に、判断された自車の現在位置情報の信頼度を算出し、それら情報をライト制御部9に出力する。
(もっと読む)
地図評価装置および地図評価方法
【課題】ナビゲーション装置等で用いられる地図データの信頼度を評価する。
【解決手段】絶対位置検出手段により車両の絶対位置を検出し、検出された車両の絶対位置に基づき、地図データ記憶手段に記憶されている地図データの表す道路地図を基準とした車両の位置を取得し、車両の走行に伴い検出された車両の絶対位置を、車両の走行軌跡情報として、道路地図を基準とした車両の位置と関連づけて記憶し、記憶された走行軌跡情報と、道路地図を基準とした車両の位置とを比較し、車両の絶対位置を基準とした場合における地図データの誤差である地図データの信頼度を、地図信頼度として設定する。
(もっと読む)
車両用地図表示装置
【課題】地図データの容量を抑えつつ、多くの情報が含まれた道路画像を表示することができる車両用ナビゲーション装置を提供する。
【解決手段】車両が走行中の道路の路面上をカメラA7およびカメラB8によって撮影し、道路情報検出手段21では、撮影画像から車両が走行中の道路に関する道路情報(道路幅員、道路標示)を検出する。そして、道路画像表示制御手段24において、地図データ記憶器2に記憶されている道路データに基づいて作成した道路画像に、検出した道路情報に基づいて作成した路面表示画像を追加して、ディスプレイ3に表示する。これにより、地図データの容量を抑えつつ、多くの情報が含まれた道路画像を表示することができ、また、道路情報をユーザが入力する手間も軽減できる。
(もっと読む)
自車位置判定装置
【課題】自車位置の判定を高精度に行うことが可能な自車位置判定装置を提供する。
【解決手段】自車位置計算部14は、自車が駐車場の建物内に存在するか否かを判定するとともに、自車が建物内に存在すると判定された後に、自車が建物の屋上に存在するか否かを判定する屋内・屋上判定部28と、自車が駐車場を脱出したか否かを判定する駐車場判定部30と、自車が建物の屋上に存在すると判定された場合に、駐車場判定部30により自車が駐車場を脱出したと判定されないように判定制御を行う判定制御部32とを有する。
(もっと読む)
ナビゲーション装置
【課題】詳細地図の表示可能な領域を広げてシミュレーションの利便性を向上したナビゲーション装置を提供する。
【解決手段】ナビゲーション装置100は、広域地図M1を示す広域地図情報と詳細地図M2を示す詳細地図情報とを格納している広域地図格納部107および詳細地図格納部111と、広域地図情報の示す所定範囲の広域地図M1を表示部110に表示させる広域表示制御部108と、表示された広域地図上の道路L1の中から、ユーザによる操作に応じて形成された操作線に近い形状を有する指定道路を特定し、その指定道路上の操作線の長さに応じた地点を、指定地点として特定する地点特定部105と、詳細地図情報によって示されるその指定地点における詳細地図M2を表示部110に表示させる詳細表示制御部109とを備える。
(もっと読む)
車両位置算出方法及び車載装置
【課題】合流前に高精度な自車位置を算出することができる車両位置算出方法及び車載装置を提供する。
【解決手段】運転支援装置1のバックモニタコンピュータ3は、車両に設けられたカメラ20から画像データを取得する。そして、画像データを用いて、合流エリアに路面標示されたゼブラゾーンを検出する。また、検出したゼブラゾーンの幅を算出し、その幅と、ゼブラゾーン終端までの距離を記憶するテーブルに基づいて、加速車線内での車両の位置を算出する。
(もっと読む)
車両用ナビゲーション装置
【課題】車両の方向転換(Uターン)が行われたか否かを精度良く判定して、方向転換が行われた場合には、車両が走行する道路上に車両マークを即座に表示すること。
【解決手段】車両がUターンを行った場合には、そのUターン開始前の進行方向とUターン終了後の進行方向とは、結果としてほぼ逆方向となる。従って、車両が進行方向の変化を開始した進行方向開始点を基準として不感帯エリアを設定し、その不感帯エリア進入位置におけるエリア進入方向及び退出位置におけるエリア退出進行方向に基づいて、車両がUターンしたか否かを簡便かつ精度良く判定することができる。
(もっと読む)
ナビゲーション装置および車両位置確定方法
【課題】ランダバウト内でのマップマッチング精度を向上させ、車両位置マークがランダバウトの道路上から外れてしまう不都合を極力防止することが可能な「ナビゲーション装置および車両位置確定方法」を提供する。
【解決手段】車両の回転角度を検出する角度センサ5aの出力信号に基づいて、ランダバウト内を走行中の車両の回転角度変化量θを求め、その回転角度変化量θと同じ角度をランダバウトの中心角∠A’OB’とするような点B’をマッチングポイントとして求める。このように、距離センサ5bにより検出される距離情報は用いず、回転角度変化量θを利用してマップマッチングを行うことにより、距離情報がランダバウト内でのマップマッチングに与える影響を排除して、道路リンクと実際の道路との間に大きさの差があるランダバウト内でもマップマッチングを精度良く行うことができるようにする。
(もっと読む)
移動体用位置推定装置
【課題】道路形状や周辺環境に影響されずに高精度に移動体の位置を推定する移動体用位置推定装置を提供すること。
【解決手段】移動体に搭載され、移動体の位置を推定する移動体用位置推定装置に、移動体に搭載された慣性航法センサ群(加速度センサ、ヨーレートセンサなど)の出力に基づいて移動体の位置を推定する第一の推定手段と、少なくともノード情報を含む地図情報を記憶した記憶手段と、ノード情報から予測された移動体の予想移動軌跡に基づいて移動体の位置を推定する第二の推定手段と、第一の推定手段により推定された移動体位置と第二の推定手段により推定された移動体位置とを合成処理して移動体の最終推定位置を決定する合成手段とを備える。
(もっと読む)
経路案内システム及び経路案内方法
【課題】最適なタイミングで案内点についての経路案内を開始することができるようにする。
【解決手段】現在地を検出する現在地検出部と、現在地に基づいて目的地までの探索経路を探索する経路探索処理手段と、探索経路に基づいて案内点を設定する案内点設定処理手段と、探索経路に基づいて探索経路上の各道路における推奨レーンを算出する推奨レーン算出処理手段と、現在地から案内点までの間において推奨レーンが変化する推奨レーン変化点を検出する推奨レーン変化点検出処理手段と、推奨レーン変化点を基準にして、案内点についての経路案内地点を設定する経路案内地点設定処理手段とを有する。現在地から推奨レーン変化点までに十分な距離を採ることができるので、推奨レーン変化点で変化後の推奨レーンに確実に車両を移動させることができる。
(もっと読む)
車載用ナビゲーション装置及び車両の速度に基づくマップマッチング方法
【課題】 車両を取り巻く環境にかかわらず、また、他のマップマッチング技術と組み合わせることで、車両が存在する道路を精度良く特定することが可能な車載用ナビゲーション装置及び車両の速度に基づくマップマッチング方法を提供する。
【解決手段】 距離センサ5bと、制御部17とからなる車両の速度を検出する速度検出手段と、車両の期待速度の変化を示す期待速度パターンデータを、道路地図上の道路を示す道路データに関連付けて有する地図データベースとを備える車載用ナビゲーション装置10であって、速度検出手段が検出した速度に基づき、車両の速度変化を示す速度パターンデータを算出する処理と、速度パターンデータと期待速度パターンデータとを比較して、相関の度合いを算出する処理と、算出した相関の度合いに基づき、車両が存在する道路を特定する処理とを実行する制御部17を備える。
(もっと読む)
ナビゲーション装置及び車両位置推定方法
【目的】 カーブ走行時に直線走行時と異なる方法で車両位置推定を行なう「ナビゲーション装置及び車両位置推定方法」を提供することである。
【構成】 車両回転方向計算部は車両方位の変化から車両回転方向を判別し、角速度計算部は車両の角速度を求め、回転半径計算部は該角速度と所定時間毎の移動距離とから車両の回転半径Rを求め、回転半径補正部は左回転であれば道路上の走行位置に応じた補正値WLだけ大きくなるように回転半径Rを補正し、右回転のであれば道路上の走行位置に応じた補正値WRだけ小さくなるように回転半径Rを補正し、車両位置推定部は該補正した回転半径を用いて道路中心線上に車両位置を推定する。
(もっと読む)
ナビゲーション装置
【課題】 最新の交通情報を使用する原則があるナビゲーション装置であっても、簡便な方法で、取得した交通情報の中から、精度が高い交通情報を抽出しナビゲーション処理に使用する。
【解決手段】 本発明のナビゲーション装置は、取得した交通情報のうち最新の交通情報を用いてナビゲーション処理を行うナビゲーション手段とを備えている。ただし、ナビゲーション手段は、取得した交通情報の中に、プローブカーにより収集された情報を用いて生成されたプローブカー起源交通情報と、当該プローブカー起源交通情報を取得した後に取得した交通情報であってプローブカーにより収集された情報を用いずに生成された交通情報とが含まれている場合で、かつ当該プローブカー起源交通情報が所定期間内に取得されたものである場合には、当該プローブカー起源交通情を最新か否かに関らずナビゲーション処理に用いる。
(もっと読む)
車載ナビゲーション装置
【課題】立ち寄ることが容易な施設か否かを、ユーザにわかりやすく表示することが可能な車載ナビゲーション装置を提供すること。
【解決手段】車両の走行道路及びその道路における車両進行方向に基づいて、表示対象施設が、車両の進行方向車線に面している進行方向車線側施設か、対向車線に面している対向車線側施設かを判定する。そして、進行方向車線側施設を非透過性の施設マークにて表示し、対向車線側施設を透過性の施設マークで表示する。このため、ユーザは、施設マークの表示態様から、立ち寄りが容易な進行方向車線側施設であるか否かを簡単に判断することができる。
(もっと読む)
車載ナビゲーション装置
【課題】車両が走行している道路をより正確に認識することができること。
【解決手段】高架道路と高架道路下の道路とでは車両周辺の状況が大きく異なる点、すなわち、高架道路と高架道路下の道路とのそれぞれ特有の車両周辺の状況がある点に着目する。この着目点から、画像処理された車両周辺の画像に、道路上方に高架道路があると検出された場合、車両は高架道路下の道路を走行しており、画像処理された車両周辺の画像に、道路側方に街灯列があると検出された場合、車両は高架道路を走行していると決定する。これにより、車両が走行している道路をより正確に認識することができる。
(もっと読む)
ナビゲーション装置
【課題】 自立航法用センサからの距離情報を利用できない場合であっても、自車位置を精度良く算出することができる「ナビゲーション装置」を提供する。
【解決手段】 ナビゲーション装置における自車位置の更新方法は、自立航法センサによる距離情報を利用可能か否かを判定する判定ステップと、距離情報を利用することができないと判定したとき、GPS測位によるGPS位置の変化量により自車位置を更新する第1の更新ステップと、更新された自車位置を地図上の道路上にマップマッチングし、マップマッチングされた道路上の位置を自車位置に更新する第2の更新ステップとを有する。
(もっと読む)
101 - 120 / 131
[ Back to top ]