
Fターム[2F129BB53]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | マップマッチング (2,282) | 車線・道路幅データの利用 (62)
Fターム[2F129BB53]に分類される特許
21 - 40 / 62
自車位置認識装置及び自車位置認識方法
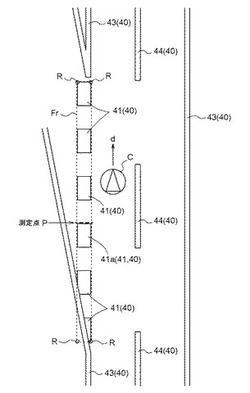
【課題】対象地物を認識して正確な自車位置を得る。
【解決手段】自車両Cに搭載された撮像装置により撮像した画像情報を取得する画像情報取得手段と、自車両Cの現在位置を示す自車位置情報を取得する自車位置情報取得手段と、自車位置情報に基づいて撮像装置により撮像される対象地物の位置及び形態の情報を含む地物情報を取得する地物情報取得手段と、地物情報に基づいて画像情報に含まれている対象地物の画像認識を行う画像認識手段と、画像認識手段により認識された画像認識結果と地物情報とに基づいて自車位置情報を補正する自車位置補正手段と、を備え、自車位置補正手段は、自車位置情報に基づいて自車両Cが高速道路上にあることが認識されている場合に、高速道路の本線車道とこれに接続する道路との接続部に存在する道路標示40の太破線41と実線43とが分岐又は合流する部分の画像認識結果に基づいて自車位置情報の補正を行う。
(もっと読む)
監視応用のためのマップマッチング

【解決手段】
この発明の代表的な実施例にしたがって、目標物のための測定された位置とディジタルマップにおける情報との間のマップマッチング用の装置が示されている。これは、測定された位置に基づく、さらには、既定の誤差に基づくマップ上のマップ作成(cartography)エレメントの第1選択を実行するために使用されている計算ユニットを有する。さらに、この計算ユニットは、第1および第2補助(secondary)計算ユニットのための選択されたマップ作成エレメントを提供するように設計されている。さらに、補助計算ユニットからの値が、同一の測定のユニットにおいて変換される。
(もっと読む)
車両挙動学習装置及び車両挙動学習プログラム
【課題】道路上の特定の位置における頻度の高い車両の挙動を、高い位置精度を伴って学習することが可能な車両挙動学習装置を提供する。
【解決手段】自車位置情報Lと、自車両の周辺の画像情報Gと、自車両の周辺の地物情報Fとを取得し、画像情報Gに含まれる対象地物の認識処理が行われる。挙動検出手段7は、画像認識に成功した位置から所定範囲内の自車両の挙動を検出する。検出結果を表す挙動検出情報Bは、検出位置の情報と関連づけて検出結果記憶手段8に記憶される。学習挙動抽出手段29は、自車両が同じ場所を複数回通行することにより検出結果記憶手段8に記憶された、同じ自車両の挙動についての複数の挙動検出情報Bに基づいて、繰り返し検出される自車両の挙動を学習挙動として抽出し、学習挙動の属性情報及び位置情報を対応する対象地物の地物情報Fと関連づけた学習挙動情報Rとして出力する。
(もっと読む)
自己位置標定装置、自己位置標定方法および自己位置標定プログラム
【課題】道路上の白線や、道路標識といった既存の道路インフラを利用して、自己位置標定装置の標定精度を向上させる。
【解決手段】車両に搭載した自己位置標定装置100において、DR演算部3はデッドレコニングにより車両位置を算出する。擬似距離残差計算部22は擬似距離と衛星軌道パラメータに基づく衛星−車両間の距離とで擬似距離残差を算出する。カメラ7は車両前方の道路を撮像し、画像処理部8は画像に映る白線の方位角を算出し、白線方位角取得部23は白線情報データベース9から白線の方位角を取得し、白線方位角残差計算部24は画像処理部8が算出した白線の方位角と白線方位角取得部23が取得した白線の方位角とで方位角残差を算出する。拡張カルマンフィルタ6は擬似距離残差と方位角残差とを観測量として入力し、DR演算部3の測位結果の誤差を推定する。DR演算部3は拡張カルマンフィルタ6の推定誤差で測位結果を補正する。
(もっと読む)
走行レーン判定装置
【課題】走行環境やドライバ意図、道路形状に影響されることなく精度良く車両の走行レーンを判定する。
【解決手段】情報処理部1は、車速が設定車速以上で、且つ、道路地図情報より複数の走行レーンが存在する道路上を走行している車車間通信が確立されている他車両の中から判定対象とする車両を選択し、判定対象が旋回走行状態の場合は、運転状態を基に判定対象の旋回半径を演算し、該旋回半径と予め設定しておいた閾値とを比較して走行レーンを判定する一方、判定対象が直進走行状態の場合は、過去に走行レーンを走行した車両位置の分布を基に判定対象の位置座標を座標変換し、該座標変換した位置座標の値と予め設定しておいた閾値とを比較して走行レーンを判定する。
(もっと読む)
地図表示システム、端末装置、地図表示サーバ及び地図表示方法
【課題】位置検出手段により検出される現在位置情報をより高精度に実際に走行中の道路にマッチングすることが可能な地図表示システム、端末装置、地図表示サーバ及び地図表示方法を提供すること。
【解決手段】表示手段12と、地図DB32と、ノードN及びリンクL1〜L11とから構成され、さらにリンクの幅員情報を有する道路ネットワークDB33と、リンクを対応する幅員情報に基づいてポリゴン化するネットワークポリゴン作成手段37と、位置検出手段17と、現在位置情報を軌跡情報として記憶する軌跡情報記憶手段21と、軌跡情報を所定の仮想幅員情報に基づいてポリゴン化する軌跡情報ポリゴン作成手段20と、ポリゴン化されたリンクとポリゴン化された軌跡情報とを比較して軌跡情報をリンク及びノード上にマッチングするマップマッチング手段18と、表示手段12に表示する地図情報を描画する地図描画手段15と、を備える。
(もっと読む)
運転支援方法及び運転支援装置
【課題】処理速度も速く、しかも、精度も落とすことなく安価に各種矢印信号灯を判別し、適切な運転支援を実行する運転支援方法及び運転支援装置を提供する。
【解決手段】運転支援装置1の画像プロセッサ8が矢印信号灯を付設した信号機の赤色信号灯の点灯を判定すると、CPU2は、矢印信号灯が点灯していると推定する。そして、自車位置に基づいて前方の信号機の信号機データSDを読み出して、矢印信号灯の対象走行レーンデータと自車両が走行している自車両走行レーンに基づいて、CPU2は該矢印信号灯が自車両に対するものかどうかを判定する。対象走行レーンデータと自車両走行レーンが一致したとき、種別データの矢印方向を示す方向データに基づいて、点灯した矢印信号灯に即した走行をアナウンスする。
(もっと読む)
レーン判定装置及びレーン判定方法、並びにそれを用いたナビゲーション装置
【課題】交差点で進路変更する場合において、交差点の通過直後に正確なレーン判定を行うことを可能としつつ、そのようなレーン判定のための演算処理負荷を軽減し、必要なデータベースのデータ量を抑えることが可能なレーン判定装置等を提供する。
【解決手段】自車両が走行中の道路R0のレーンである自車レーンを判定する第一レーン判定手段と、道路R0に対して交差点Cを有して交差する交差道路R2のレーン数及びレーン幅の情報を含む道路情報を取得する道路情報取得手段と、自車両の交差点Cへの進入方位Iを検出する進入方位検出手段と、交差点C内における進入方位Iに平行な方向の自車両の移動量Dを検出する移動量検出手段と、自車両が交差点Cを通過したときに、道路情報と、移動量Dとに基づいて、交差道路R2における自車レーンを判定する第二レーン判定手段と、を備える。
(もっと読む)
レーン判定装置及びレーン判定方法
【課題】区画線の画像認識結果を用いて自車両の走行するレーンの判定を行うに際し、道路の分岐点の手前に当該レーンを認識するための区画線(実線又は破線の白線)が存在しない場合であっても、当該分岐点を通過後に自車両の走行するレーンを迅速に判定する。
【解決手段】区画線の画像情報Gを取得する画像情報取得手段5と、自車両Cの現在位置の自車位置情報Sを取得する自車位置情報取得手段3と、自車両Cの周辺に存在する区画線の位置及び形態の情報を含む道路情報Hを取得する道路情報取得手段4と、画像情報G中の区画線の画像認識を行う画像認識手段6と、画像認識結果と道路情報Hとにより自車両Cが走行する自車レーンを判定し、自車両Cの進行方向に分岐点があり、かつ画像情報G中に区画線の全部又は一部が撮像されなくなった後に撮像される特定区画線の撮像順序、形態、位置、道路情報Hに基づいて自車レーンを判定するレーン判定手段とを備える。
(もっと読む)
レーン判定装置及びレーン判定方法、並びにそれを用いたナビゲーション装置
【課題】交差点を道なりに直進する場合において、交差点の通過直後に正確なレーン判定を行うことを可能としつつ、そのようなレーン判定のための演算処理負荷を軽減し、必要なデータベースのデータ量を抑えることが可能なレーン判定装置等を提供する。
【解決手段】自車両が走行中の道路R0のレーンである自車レーンを判定する第一レーン判定手段と、道路R0に対して交差点Cを挟んで道なり方向に存在する直進道路R1のレーン数及びレーン幅の情報を含む道路情報を取得する道路情報取得手段と、自車両の交差点Cへの進入方位Iを検出する進入方位検出手段と、交差点C内における進入方位Iに直交する方向の自車両の移動量Dを検出する移動量検出手段と、自車両が交差点Cを通過したときに、交差点Cへの進入前の自車レーンと、道路情報と、移動量Dとに基づいて、直進道路R1における自車レーンを判定する第二レーン判定手段と、を備える。
(もっと読む)
移動体位置検出方法および移動体位置検出装置
【課題】リアルタイムで精度良く移動体の現在位置および方位角を検出することの可能な移動体位置検出方法を提供する。
【解決手段】一のGPSデータを始点として導出された時刻taにおける移動体の位置(xg(ta),yg(ta))および方位角(orig(ta))と、その次のGPSデータから得られた時刻taにおける移動体の位置(xg’(ta),yg’(ta))および方位角(orig’(ta)) とを含む予想誤差(ΔDx,ΔDy,ΔDori)に、その予想誤差(ΔDx,ΔDy,ΔDori)の確率密度関数(Px,Py,Pori)を含む補償係数(Kx,Ky,Kori)を乗算することにより導出される補償量(Cx,Cy,Cori)を用いて、時刻ta以降の移動体の位置(xg(ti),yg(ti))および方位角(orig(ti))を特定する。
(もっと読む)
道路データ生成方法、装置及びプログラム
【課題】
画像データから道路データを生成する。
【解決手段】
線分抽出機能(24)が、オルソ画像データ(14)から線分を抽出する。道路エリア抽出機能(26)が、抽出された線分から道路エリアの線分を抽出する。車道外側線解析・取得機能(28)が、当該道路エリア抽出手段(26)で抽出された線分から当該道路の車道外側線を取得する。道路ネットワーク線生成機能(30)が、車道外側線から道路ネットワーク線を生成する。
(もっと読む)
地物認識装置・自車位置認識装置・ナビゲーション装置・地物認識方法
【課題】地物の撮像情報と地図データベースに記憶された地物に関する道路特徴情報とに基づいて、地物を認識する地物認識装置において、例えば、区画線としての実線と破線とを誤って識別するような問題を発生することがない地物認識装置を得る。
【解決手段】路面を撮像した画像情報を逐次取り込む画像情報取得手段と、撮像位置周辺の地物に関する道路特徴情報を取得する道路特徴情報取得手段と、地物に対応する認識対象物の画像を認識する画像情報認識手段と道路特徴情報と、認識対象物の画像の画像情報中の配置に基づいて地物を認識する地物認識装置を構成するに、車両の走行速度情報Vを取得する速度情報取得手段101を備え、走行速度情報が所定の値より低い場合に認識対象物の認識を停止する。
(もっと読む)
退出検出装置
【課題】本発明は、車両の本線道路から退出路への退出を精度良く検出することができる退出検出装置の提供を目的とする。
【解決手段】本発明は、車両の本線道路から退出路への退出を検出する退出検出装置において、車両に搭載され、車両周辺の道路区間線を検出する道路区間線検出手段(12、16)を備え、前記道路区間線検出手段の検出結果に基づいて、車両が本線道路の特定車線を走行している状態から所定の道路区画線を跨いだと判定した場合に、前記車両の退出路への退出を検出することを特徴とする。
(もっと読む)
路上標示認識装置およびカーナビゲーションシステム
【課題】経年変化によるかすれや、部分的な欠落などによって、同一の白線であっても部分的に画像認識ができない場合でも、白線の認識結果の信頼性を高める。
【解決手段】車両に備えられたカメラの画像を処理して路上標示物を認識する路上標示物認識手段と、地図リンク情報を保持する地図DBと、車と路上標示物との相対位置関係の遷移パターン格納した遷移パターンDBと、前記路上標示物認識手段による認識結果と前記遷移パターンを照合する遷移パターン照合手段と、前記認識結果を保持する認識結果DBを備え、前記遷移パターン照合手段の出力結果を用いて路上標示物の有無を判定する。
(もっと読む)
車両の走行制御システム
【課題】
自車両の前方の道路の形状の認識にあって自車位置との関係で迅速かつ正確に算出できる車両の走行制御システムの提供。
【解決手段】
少なくとも、車両の前方の道路の情報から前記車両の進行方向ベクトルと直交する線分の前記道路の中心線に至るまでの横位置距離を該進行方向ベクトルの伸張方向に沿った複数の計測点で検出する変位検出手段と、
この変位検出手段によって得られる各横位置距離の変化の線形性から道路形状を特定する道路形状認識手段と、
この道路形状認識手段の前記特定の結果に応じて前記車両の走行制御を行う走行制御手段と、
を備える。
(もっと読む)
マップマッチングに適するリンク設定システム、その方法およびプログラム
【課題】マップマッチングミスを無くすこと。
【解決手段】道路幅と平行する道路の道路幅や道路ネットワークの位置関係に応じてリンクのずらす方向とずらす距離を計算してリンクを設定する。
(もっと読む)
対象物認識装置
【課題】本発明は、対象物認識装置に係り、道路上の対象物の認識に要する処理負荷を軽減することにある。
【解決手段】GPSや車速,舵角等による走行軌跡に基づいて自車両の位置を測位すると共に、カメラ撮像画像を用いた対象物の認識結果に基づいて自車両の位置を測位する。また、主に車両の移動距離が長くなるほど低下する自車両の位置を測位するうえでの測位精度を算出する。予め地図データベースに自車両の認識すべき道路上の対象物の位置データを格納する。そして、測位される自車両の位置、地図データベースに格納されている認識すべき対象物の位置、及び算出される自車位置の測位精度に基づいて、対象物を認識すべき道路の認識範囲を設定する。この設定された認識範囲においてカメラ撮像画像を処理して対象物を認識する。
(もっと読む)
現在位置表示装置
【課題】道路の車線数をより精度の高い値に補正することができるナビゲーション装置20を提供する。
【解決手段】ナビゲーション装置20は、地図上の道路を構成する各リンクのリンクデータであって、対応する道路の車線数および道路種別を含む地図格納部200を参照して、各道路について、当該道路の道路種別が予め定められたグループに属し、かつ、対応する車線数が第1の値である場合に、対応する車線数を第2の値に補正し、補正された車線数を用いて車両の現在位置を補正する。
(もっと読む)
車両位置測位装置
【課題】ジャイロと車速センサを用いた自律航法とマップマッチングの組合せによる自車位置の測定では、実際の自車位置とカーナビが保持している自車位置がずれる。
【解決手段】撮像した画像から白線を抽出する白線抽出手段と、画像を処理して自車と白線との距離を求める手段と、一定時間内における白線との距離の変化を算出する距離変化算出手段と、一定時間内の走行距離を測定する走行距離測定手段とを有し、白線との距離の変化と走行距離を用いて自車の走行ベクトルを算出し、前回計測した自車位置に走行ベクトルを加算して自車位置を計測する。または、自車の前輪の舵角を得るための手段と、一定時間内における舵角の平均値を用いて一定時間内における自車の進行方向を算出する手段と、一定時間内の走行距離を測定する手段とを有し、進行方向と走行距離を用いて自車の走行ベクトルを算出する。
(もっと読む)
21 - 40 / 62
[ Back to top ]