
Fターム[2F129BB53]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | マップマッチング (2,282) | 車線・道路幅データの利用 (62)
Fターム[2F129BB53]に分類される特許
41 - 60 / 62
車載用ナビゲーション装置
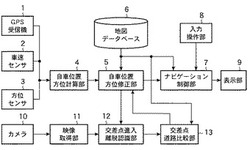
【課題】安定的に、しかも安価な方法で自車位置を修正できる車載用ナビゲーション装置を提供する。
【解決手段】自車の位置および方位を計算する自車位置方位計算部4と、地図データを格納した地図データベース6と、路面を撮影するカメラ10と、カメラからの路面の映像に含まれる交差点前後の道路標示に基づき交差点への進入位置および交差点からの離脱位置を認識する交差点進入離脱認識部12と、認識された進入位置および離脱位置と、地図データベースからの地図データで示される、該交差点において自車の直進方向に交差する道路リンクとの幾何学的計算により自車位置の前後方向のずれを計算する交差点道路比較部13と、地図データと計算されたずれとに基づき、自車の位置および方位を修正する自車位置方位修正部5と、自車位置方位修正部で修正された自車の位置および方位に基づきナビゲーションを行うナビゲーション制御部7とを備えている。
(もっと読む)
車両走行位置推定システム及び車両走行位置推定方法

【課題】マルチパスの影響により計測位置データが誤差を含む場合に、この影響を加味して計測位置データを補正しなくても車両の正確な道路の幅方向の走行位置を推定することができる車両走行位置推定システム及び車両走行位置推定方法を提供する。
【解決手段】通信部403は、路上ビーコン3から通信回線5を介して走行軌跡情報を受信する。走行軌跡解析部404は、走行軌跡解析の処理を実現し、走行軌跡受信情報の計測位置データのばらつきに基づいて、車両100の道路の幅方向の走行位置を推定する。交通情報提供部405は、交通情報提供の処理を実現する。マルチパス判定部406は、リンク−マルチパス対応データ及び車線−ばらつき対応データを作成する。制御部407は、記憶部400、時計部401、GPS処理部402、通信部403、走行軌跡解析部404、交通情報提供部405、マルチパス判定部406の処理を制御する。
(もっと読む)
走行路区別方法及び走行路区別装置
【課題】双曲線航法の原理を利用し区別対象の走行路に対して固定局を適切に配置することで、移動局の存在する走行路の検出精度を向上する。
【解決手段】移動局(列車)2A,2Bが走行する走行路(線路)4A,4Bの各中心線上で、受信時刻差がそれぞれ零となるように、走行路4A,4Bを挟んで固定局1A〜1Cを配置し、移動局2A,2Bから送信した信号を各固定局1A〜1Cで受信し、走行路判定部3により、固定局1Aと1Cの受信時刻差及び固定局1Bと1Cの受信時刻差を算出し、受信時刻差の正負に基づいて送信元の移動局が存在する走行路を判定する。
(もっと読む)
位置検出装置及び位置検出方法並びにその装置を有する車両
【課題】道路上での自己位置を正確に検出することができる位置検出装置を提供する。
【解決手段】光ビーコン2の送信部2aから発せられる赤外線を受光する受光手段3と、この受光手段3からの信号を用いて前記送信部2aとの道路に沿った方向の相対位置を検出する相対位置検出手段4とを備えている。受光手段3は、赤外線の入射角度に応じて検出レベルに差が生じ得るように複数配置されている受光素子を有している。相対位置検出手段4は、各受光素子の検出レベルを用いて前記入射角度を検出するとともに、この入射角度、並びに、受光素子及び送信部2bの高さ情報に基づいて前記送信部2aとの前記相対位置を検出する。
(もっと読む)
走行車線推定装置及び走行車線推定方法
【課題】走行中の車線を適正に検出することのできる「走行車線推定装置及び走行車線推定方法」を提供する。
【解決手段】カーブなどの道路屈曲区間走の行601を行っている期間において(a)、地走行軌跡曲率曲線611の現在の時点に対応するポイント621の走行軌跡曲率Kcが表す曲率半径Rc=(1/Kc)と、地図データから求めた現在位置が位置する道路曲線曲率520上のポイント622の道路曲率Krが表す曲率半径Rr(Rr=1/Kr)との差ΔRは、自車の現実の位置651の、道路中央位置652からの道幅方向の距離を表す(c、d)。そこで、このお曲率半径の差ΔRと、道幅Wと車線数から、現在走行中の車線を推定する。
(もっと読む)
自位置認識システム
【課題】他車の有する自位置に関する情報に基づいて、自位置を認識するシステムにおいて、位置精度が高く、認識される自位置の確からしさを高く維持できる自位置認識システムを得る。
【解決手段】各車両に、自位置の確からしさの指標である自信度を演算する自信度演算手段43bを備え、送信車両から受信車両に、送信車両の自位置及び自信度を送信可能に構成するとともに、受信車両に対する送信車両の相対位置関係を検出する位置関係検出手段10を備え、送られてくる送信車両の自信度と、受信車両が認識している自信度とを比較する自信度比較手段44を備え、送信車両の自信度が、受信車両の自信度より高い場合に、送信車両の自位置及び相対位置関係に基づいて自位置の補正を行う。
(もっと読む)
自位置認識システム
【課題】走行レーンの認識といった走行路巾方向の自位置認識に関して、精度が高く、信頼性の高い自位置認識を行うことができる自位置認識システムを得る。
【解決手段】各車両に、自位置の確からしさの指標である自信度を求める自信度演算手段43bを備え、送信車両から受信車両に、送信車両の自位置及び自信度が送信するとともに、受信車両と送信車両との相対位置関係を確認する位置関係検出手段10・11を備え、送信車両の自信度と、受信車両の自信度とを比較する自信度比較手段44を備え、送信車両の自信度が、受信車両の自信度より高い場合に、送信車両の自位置及び相対位置関係に基づいて自位置の補正を行う。
(もっと読む)
自車位置判定装置
【課題】自車位置の判定を高精度に行うことができ、ひいては、ミスマッチングを防止してナビゲーションの際に自車を目的地まで適切に案内することができる「自車位置判定装置」を提供すること。
【解決手段】自車位置の判定を行う自車位置判定装置14であって、捕捉されたGPS衛星の個数が所定数以下の場合に、前記自車位置の判定として自車が屋内に存在する旨の判定である屋内判定を行う屋内判定手段28を備えたこと。
(もっと読む)
経路案内システム及び経路案内方法
【課題】確実に探索経路に沿って車両を走行させることができるようにする。
【解決手段】自車の現在地を自車位置として検出する現在地検出部と、自車位置に基づいて目的地までの探索経路を探索する経路探索処理手段と、探索経路に基づいて案内交差点を設定する案内交差点設定処理手段と、案内交差点についての経路案内を行うための経路案内地点を設定する経路案内地点設定処理手段と、経路案内領域が自車位置から案内交差点までの所定の交差点と重なるかどうかを判断する変更条件判定処理手段と、経路案内領域が所定の交差点と重なる場合に、経路案内領域を変更する領域設定処理手段とを有する。経路案内が行われている間に交差点を車両が走行することがなくなるので、経路案内に従って確実に探索経路に沿って車両を走行させることができる。
(もっと読む)
経路案内システム及び経路案内方法
【課題】走行レーンを確実に特定することができるようにする。
【解決手段】自車の現在地を自車位置として検出する現在地検出部と、自車が走行している道路上の自車位置より前方の進行方向のいずれかのレーンに地物が存在するかどうかを判断する地物判定処理手段と、進行方向のいずれかのレーンに地物が存在する場合、地物が存在するレーンを誘導レーンとして設定する設定処理手段と、誘導レーンに基づいて走行レーンを特定するレーン特定処理手段とを有する。進行方向のいずれかのレーンに地物が存在する場合、地物が存在するレーンが誘導レーンとして設定され、誘導レーンに基づいて走行レーンが特定されるので、走行レーンを確実に特定することができる。
(もっと読む)
経路案内システム及び経路案内方法
【課題】運転者が案内交差点を正確に認識することができるようにする。
【解決手段】現在地検出部と、探索経路を探索する経路探索処理手段と、案内点の手前の所定の箇所に経路案内地点を設定し、経路案内地点に自車が到達すると、案内点について経路案内を行う案内処理手段とを有する。案内処理手段は、経路案内地点から案内点までの各交差点における信号機の有無に基づいて、経路案内において案内点を容易に特定することができる案内点特定条件が成立するかどうかを判断する案内点特定条件判定処理手段を備える。案内点特定条件が成立する場合、案内処理手段は、案内点特定条件に対応させてあらかじめ設定された内容の経路案内を行う。
(もっと読む)
車両位置推定装置、車両用走行支援装置及び車両位置推定方法
【課題】 天候等の走行環境の影響を受けることなく、車線位置検出を的確に行う。
【解決手段】 自車両と同一方向の車線上に存在し且つ自車両から所定距離以内に存在する周囲車両を位置検出用車両とし(ステップS42)、この位置検出用車両及び自車両の位置情報から、前記周囲車両の自車両に対する相対位置関係を算出し、この相対位置関係と自車両と同一方向の車線の車線数とに基づいて、自車両が各車線位置に存在する信頼度を算出する(ステップS43)。同様の手順で他の周囲車両と自車両との相対位置関係に基づいて自車両が各車線位置に存在する信頼度を算出し、複数の周囲車両に基づいて推測した自車両が各車線位置に存在する信頼度の総和を算出し、この総和が最大となる位置に、自車両が位置する可能性が高いと推測する(ステップS46)。
(もっと読む)
ナビゲーション装置、その方法、そのプログラム及びその記録媒体
【課題】
正確なルート案内に要求される道路種別の判定を簡易な構成で行う。
【解決手段】
道路種別判定部210が、地図データ保持領域121内の地図データを参照することにより、走行中の車両が高速道路と一般道路との並行隣接区間に到達したか否かを判定する。この判定結果が肯定的であった場合に、走行時間計測部220が、並行隣接区間内に車両の走行時間を計測するための測定区間を設定して、車両が測定区間を走行するのに実際に要した時間を計測する。そして、道路種別判定部240が、その計測された走行時間と、測定区間における交通状況を考慮して設定された高速道路用設定値及び一般道路設定値とを利用して、車両が走行している道路種別が高速道路又は一般道路のいずれであるかを判定する。
(もっと読む)
ナビゲーション装置及び車両位置推定方法
【目的】 カーブ走行時に直線走行時と異なる方法で車両位置推定を行なう「ナビゲーション装置及び車両位置推定方法」を提供することである。
【構成】 車両回転方向計算部は車両方位の変化から車両回転方向を判別し、角速度計算部は車両の角速度を求め、回転半径計算部は該角速度と所定時間毎の移動距離とから車両の回転半径Rを求め、回転半径補正部は左回転であれば道路上の走行位置に応じた補正値WLだけ大きくなるように回転半径Rを補正し、右回転のであれば道路上の走行位置に応じた補正値WRだけ小さくなるように回転半径Rを補正し、車両位置推定部は該補正した回転半径を用いて道路中心線上に車両位置を推定する。
(もっと読む)
自車位置検出装置、ナビゲーション装置、減速制御装置及び自車位置検出方法
【課題】 分岐地点で自車両が分岐路に進んだかどうかの判断を的確に行い、ナビゲーション装置で認識している自車両の現在位置を的確に補正する。
【解決手段】 単眼カメラ4の撮像情報に基づいて左右の道路白線の線種を判断し、ナビゲーション装置2からの自車両前方の道路地図情報に基づいて自車両前方にインターチェンジ出口への分岐地点を検出したとき、左右の道路白線の何れか一方が分岐地点の境界線の特徴である太破線であることが検出され(ステップS21、S25)、その後、他方の道路白線が太破線であることが検出されたとき(ステップS22、S26)、自車両は境界線を跨いで走行し、すなわち、本線から分岐路に進んだと判断する(ステップS23、S27)。この境界線を跨いだことを検出したとき、ナビゲーション装置2に対して位置補正要求を行い、ナビゲーション装置2では自車両の現在位置を、分岐地点の境界線近傍の位置に補正する。
(もっと読む)
車両転回検出装置および当該装置を備えた車両用ナビゲーション装置
【課題】 車両が走行中の道路を転回(Uターン)したことを確実に判別可能な車両転回検出装置、および当該装置を備えたナビゲーション装置を提供すること。
【解決手段】ECU8は、車両が車線区分線を横断すると第1タイマを起動する。位置検出器1が検出した車両の進行方向から、当該車両が反転したことが確認された際、第1タイマが起動中であって経過時間が所定時間以内である場合や、第2タイマの示す経過時間が所定時間以内で第1タイマの起動が確認された場合、すなわち、所定時間範囲内において、車両が進行方向の反転と車線区分線の横断とを行った場合に、車両が転回(Uターン)したと判別する。
(もっと読む)
車両支援技術
【課題】 複線道路における車線を考慮して車両の走行を支援することのできる走行支援技術を提供する。
【解決手段】 走行支援装置10は、道路に沿った道路基準線に基づいて道路地図を示す道路基準情報IR、車線に沿った車線基準線に基づいて道路地図を示す車線基準情報IL、道路基準情報IRと車線基準情報ILとの間の位置関係を対応付ける対応情報ACを記憶する記憶部120と、車両800が走行すべき経路を道路基準情報IRによって探索する経路探索部112と、道路基準情報IRによって探索される経路を、対応情報ACを用いて車線基準情報ILによって特定する経路特定部114と、車線基準情報ILによって特定される経路に基づいて、車両800を誘導するための誘導情報を生成する車両誘導部116とを備える。
(もっと読む)
ナビゲーション装置
【課題】走行中の車両から前方を撮像して画像処理を行うことにより、走行車両の安全を保つことが可能なナビゲーション装置を提供する。
【解決手段】車両前方を撮像して、撮像された画像中の物体の時間tからt+Δtの動きを示す移動ベクトルを車両の走行中にCCDカメラ19にて得られる画像を比較することによって求め、当該検出された移動ベクトルに基づいて、走行中の道路の道路端までの余裕度を判定し、この判定結果に基づいて、ドライバーに告知させるようにしたナビゲーション装置は、上記移動ベクトルの検出結果に基づいてCCDカメラ19の撮像方向を校正する。
(もっと読む)
ナビゲーション装置の初期位置決定方法
【課題】本発明は、移動通信端末機の位置決定方法に関し、特に、移動通信端末機の位置を決定する無線測位の誤差を改善することで、測位の正確度を向上させるためのGPS衛星の配置を利用した歩行者ナビゲーション装置の初期位置決定方法に関する。
【解決手段】本発明は、ナビゲーション装置の初期位置決定方法において、閾値以上のGPS信号の強度で受信されるGPS(Global Positioning System)衛星の数を算出するステップと、前記受信されたGPS信号から少なくとも2領域の何れか一つに位置するGPS衛星の数を算出するステップと、前記各領域でのGPS衛星の数を比較した結果に従い、初期位置を決定するステップとを含む。
(もっと読む)
車両位置認識装置及び車両位置認識方法
【課題】 車両に搭載された撮像装置により撮像した画像情報に加えて、地図情報や車両情報等を用いることにより、走行中の道路の中における車両の位置をより詳細に特定することを可能とする車両位置認識装置及び車両位置認識方法を提供する。
【解決手段】 車両に搭載された撮像装置2により少なくとも道路の路面を撮像した画像情報を取り込む画像情報取得手段3と、地図情報から前記画像情報の撮像位置周辺の地物に関する道路特徴情報を取得する道路特徴情報取得手段9と、前記画像情報の認識処理を行い、前記画像情報の中に含まれる前記地物に対応する認識対象物の画像を認識する画像情報認識手段10と、道路特徴情報取得手段9により取得された前記道路特徴情報と、画像情報認識手段10により認識された前記認識対象物の画像の前記画像情報中の配置とに基づいて、車両の道路幅方向の位置を特定する車両位置特定手段17と、を備える。
(もっと読む)
41 - 60 / 62
[ Back to top ]