
Fターム[2F129BB53]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | マップマッチング (2,282) | 車線・道路幅データの利用 (62)
Fターム[2F129BB53]に分類される特許
61 - 62 / 62
ナビゲーション装置
【課題】 オフロード判定及びオンロード判定を精度よくかつ時間遅れなく迅速に行えるようにする。
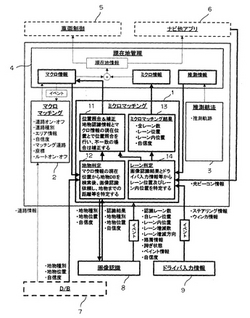
【解決手段】 地図データを記憶する記憶手段7と、記憶手段に記憶された地図データから車両の現在地近傍の情報を取得する現在地情報取得手段12と、車両の現在地近傍の情報から道路の路側帯部に関する情報を取得して路側帯部の跨ぎを判定する路側帯部判定手段14と、路側帯部判定手段14により道路の路側帯部跨ぎを判定したことを条件に車両の現在地がオンロード状態のときにはオフロードの判定を行い、車両の現在地がオフロード状態のときにはオンロードの判定を行うオン/オフロード判定手段11とを備え、車両のオフロード判定/オンロード判定を行う。
(もっと読む)
車載用ナビゲーション装置とこれに用いる車線位置推定装置

【課題】 走行中の車線位置を正確に推定することができる車載用ナビゲーション装置を提供することを目的とする。
【解決手段】 GPS部7、地図情報記憶部2とを備える車載用ナビゲーション装置50において、CPU1は現在位置算出部21、カメラ11のカメラ画像から白線を検知する白線検知部22、走行車線位置推定部23、案内タイミング制御部24を有している。CPUにはウインカスイッチ12の操作信号が入力される。走行車線位置推定部は、自車両の走行道路を検出すると、ウインカ操作信号と白線検知部から信号により車線変更を判定し、自車両が走行中の車線位置を特定する。案内タイミング制御部は、前方の分岐を検出し、特定された車線にもとづき、所定の距離手前位置で、運転者に対して分岐案内を行うように制御する。
(もっと読む)
61 - 62 / 62
[ Back to top ]