
Fターム[2F129BB53]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | マップマッチング (2,282) | 車線・道路幅データの利用 (62)
Fターム[2F129BB53]に分類される特許
1 - 20 / 62
ナビゲーション装置
【課題】車線情報を最新の状態に保つための作業量及び車線情報量を低減するとともに、走行車線を正確に求めることのできるナビゲーション装置を提供する。
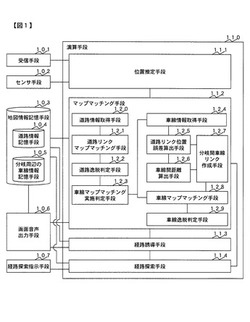
【解決手段】ナビゲーション装置は、移動体の位置を推定する位置推定手段111と、推定された移動体の位置に対応する道路リンク候補点を特定する道路リンクマップマッチング手段121と、分岐周辺の車線情報記憶手段105から道路リンク候補点の前後に存在する各対象分岐の周辺の車線情報を取得する車線情報取得手段124と、取得した車線情報を用いて各対象分岐の周辺の道路リンクの位置誤差を算出する道路リンク位置誤差算出手段125と、取得した車線情報を用いて各対象分岐の周辺の車線間距離を算出する車線間距離算出手段126と、算出した位置誤差と車線間距離を用いて各対象分岐間の車線リンクを作成する分岐間車線リンク作成手段127とを備える。
(もっと読む)
進行方向判定装置、進行方向判定方法および進行方向判定プログラム

【課題】移動体の進行方向を精度良く判定すること。
【解決手段】進行方向判定装置100は、測位点選択部140bが、測位点Qa、Qb、Qc、Qdを選択する。測位点Qaと測位点Qbとの距離は、探索距離Th2以上とする。また、測位点Qaと測位点Qdとの距離は、探索距離Th2以上とする。また、測位点Qdと測位点Qcとの距離は、探索距離Th4以上とする。角度算出部140cは、測位点QaとQbを通る直線と、測位点Qcと測位点Qdを通る直線との角度を算出し、進行方向判定部140dは、角度に基づいて、進行方向を判定する。
(もっと読む)
ナビゲーションデバイスの位置を決定すること
【課題】ナビゲーションデバイスの位置を決定するための方法を提供すること。
【解決手段】ナビゲーションデバイスは、複数の異なる位置決定手順に基づいてナビゲーションデバイスの位置を決定するように適合される。各位置決定手順は、所定のパラメータセットと共に作用する。複数の地理的エリアが提供され、各地理的エリアは、位置決定手順のうちの1つに関連付けられる。ナビゲーションデバイスの近似的位置が決定され、この近似的位置に基づいて、ナビゲーションデバイスが位置している地理的エリアが決定される。決定された地理的エリアに基づいて、複数の位置決定手順のうちの1つが選択され、選択された位置決定手順に基づいて、ナビゲーションデバイスの位置が決定される。
(もっと読む)
車両位置特定装置、車両位置特定方法、及び車両位置特定プログラム
【課題】車両の現在位置を示す現在位置情報の精度を向上できる場合にのみ当該現在位置情報の補正を行うことができる、車両位置特定装置を提供すること。
【解決手段】車両位置特定装置10は、現在位置情報を取得する現在位置情報取得部11aと、交差点の代表座標を含む交差点情報を取得する交差点情報取得部11bと、交差道路の幅を特定する交差道路幅特定部11cと、交差道路の幅と、当該交差道路が交差する交差点についての交差点情報とに基づき、現在位置情報を補正する位置情報補正部11dと、前回補正が行われた交差点における交差道路の幅と、車両が今回通過した交差点における交差道路の幅と、前回補正が行われた交差点から車両が今回通過した交差点までの走行距離とに基づき、車両が今回通過した交差点において位置情報補正部11dに補正を行わせるか否かを判定する補正要否判定部11eとを備える。
(もっと読む)
ナビゲーション装置
【課題】より到着指定時刻に近い時刻に目的地へ到着する経路を探索するナビゲーション装置を提供する。
【解決手段】目的地、現在位置、現在時刻および地図データに基づいて、現在位置から目的地への経路を探索するとともに、探索した経路での目的地への到着予定時刻を算出し、探索した経路の到着予定時刻が到着指定時刻よりも早く、両時刻の時間差が所定値以上である場合は、到着指定時刻から所定時間内で且つ到着指定時刻により近い時刻に目的地へ到着する経路を再探索する経路探索部22を備えた。
(もっと読む)
道路ノード位置管理システム
【課題】道路情報から読み出される合流・退出ノードの位置と、実際に合流・退出走行が開始される地点とのずれを起因とする各種処理における不都合を低減する。
【解決手段】道路情報中における合流・退出リンクと本線リンクとの交点としての合流・退出ノードの通過後の所定区間内で実行される可能性がある運転制御処理の情報、当該合流・退出ノードにおける前記車両の走行履歴、当該合流・退出ノードの形状的特性、の少なくとも1つを含む車両運転条件を取得し、車両運転条件に基づいて車両の経路案内処理に適した位置に合流・退出ノードを補正する第1補正処理と、マップマッチング処理に適した位置に合流・退出ノードを補正する第2補正処理とのいずれかが選択される。
(もっと読む)
情報処理装置、コンピュータプログラム
【課題】 プローブ情報に含まれる時系列の位置情報から走行リンクを精度良く特定することができる情報処理装置を提供する。
【解決手段】 中央装置1は、路側通信装置2が設置されているリンクL107が含まれない時刻t3の位置における候補リンク群が、候補リンク群A3(リンクL208、L107、L106)と候補リンク群B3(リンクL205、L204)のうちの候補リンク群B3の1つであることから、この候補リンク群B3に含まれるリンクL205、L204を走行リンクとして特定するとともに、これらの走行リンクに、時刻t2の位置における候補リンク群である候補リンク群A2(リンクL105、L104、L103、L102)と候補リンク群B2(リンクL203、L202、L207)のうちの候補リンク群B2だけが繋がるので、この候補リンク群B2に含まれるリンクL203、L202、L207も走行リンクとして特定する。
(もっと読む)
カーナビゲーション装置
【課題】正しい現在位置を算出できるカーナビゲーション装置を提供する。
【解決手段】車線変更することなく走行した場合には分岐路130に至ることとなる特定車線120を車両が走行して、そのまま分岐路130へ向かった場合、分岐路130に係る脱出リンク171上に表示候補点が算出されると、当該表示候補点のエラーコスト値ecの算出時に係数γの値を低減する。その結果、当該表示候補点の信頼度trstが高まるので、正しい現在位置が算出されやすくなる。
(もっと読む)
位置推定装置及び位置推定システム
【課題】GPS位置情報の誤差を低減して自車両の絶対位置を高精度に推定する。
【解決手段】位置推定装置は、路側通信装置200から送信された絶対位置情報を受信する通信部51と、自車両のGPS位置情報を検出するGPSセンサ53と、車速を計測する車速計測部52と、車速計測部52により計測された車速を用いて、GPSセンサ53により検出されたGPS位置情報を、通信部51により絶対位置情報が受信された時点の自車両の絶対位置に補正すると共に、通信部51により受信された絶対位置情報と、補正されたGPS位置情報と、を平均化することにより、自車両の絶対位置を推定する車両位置推定部54と、を備えている。
(もっと読む)
軌跡情報生成装置、方法およびプログラム
【課題】自立航法軌跡の精度を向上する技術の提供。
【解決手段】時系列の自立航法情報が示す車両の軌跡である自立航法軌跡を取得し、時系列のGPS情報が示す前記車両の軌跡であるGPS軌跡を取得し、前記自立航法軌跡と前記GPS軌跡とを比較して前記自立航法軌跡と前記GPS軌跡との一致度を最も高くするための前記自立航法情報の第1補正量を取得し、当該第1補正量より小さい第2補正量によって前記自立航法情報を補正する。
(もっと読む)
軌跡情報生成装置、方法およびプログラム
【課題】自立航法軌跡の精度を向上する技術の提供。
【解決手段】時系列の自立航法情報が示す車両の軌跡である自立航法軌跡を取得し、時系列のGPS情報が示す前記車両の軌跡であるGPS軌跡を取得し、前記自立航法軌跡と前記GPS軌跡とを比較して、前記自立航法軌跡と前記GPS軌跡との相違が減少するように前記自立航法情報を補正する。
(もっと読む)
ナビゲーション装置
【課題】カメラからの映像を、地図情報と自車位置とのマップマッチング以外の用途にも利用することが可能なナビゲーション装置を提供する。
【解決手段】自車両の周辺を撮像し撮像信号を出力するリアカメラ24と、自車両の走行状態を表す信号を出力する振動ジャイロ14aおよび速度センサ14bと、リアカメラ24が出力する撮像信号に基づいてキャリブレーション情報を演算する演算部35と、キャリブレーション情報に基づいて、振動ジャイロ14aおよび速度センサ14bのキャリブレーションを行うキャリブレーション部36とを備えるナビゲーション装置。
(もっと読む)
分岐路進入判断装置及び分岐路進入判断方法
【課題】自車両が分岐路に進入したことを確実に検出することができる分岐路進入判断装置等を提供する。
【解決手段】自車両の前方方向に分岐路が存在することを検出した場合に、単眼カメラ3により撮像した撮像画像に基づいて、カメラコントローラ4により認識された右側白線認識結果と左側白線認識結果との組み合わせから、コントローラ10が、自車両が分岐路に進入したと判断する。自車両が分岐路に進入した場合に、ナビゲーション装置2の位置補正部2dにより位置を補正できる。
(もっと読む)
ナビゲーションシステム、ナビゲーションシステムの携帯通信装置及びナビゲーションシステムのベース装置
【課題】徒歩移動する利用者を確実に目的地まで誘導することができるナビゲーションシステム等を提供する。
【解決手段】自局の位置情報確認機能を有する携帯通信装置1と、携帯通信装置1に経路誘導情報を供給するベース装置2とを有するナビゲーションシステムにおいて、携帯通信装置1は、交通機関を利用して現在地から目的地に至る経路の候補を示す経路情報を含む経路誘導情報の検索要求をベース装置2に対して行い、自局の移動中に、その移動状況に応じてベース装置2より供給される経路誘導情報により目的地まで誘導する。
(もっと読む)
走行支援装置
【課題】 道路周辺環境が逐次変化しても、自車両の位置を的確に認識することができる走行支援装置を提供する。
【解決手段】 走行支援装置1は、車両の位置認識レベルを含むプローブ情報を受信するプローブ情報受信機2と、GPS衛星からの電波を受信するGPS受信機3と、ECU5とを備えている。ECU5は、プローブ情報に基づいて、自車両が走行する走行路上の位置認識困難区域を有する走行マップを作成する走行マップ作成部10と、GPS受信機3の受信情報に基づいて自車両の現在位置を取得する自車位置検出部11と、自車両の現在位置と自車両の車速とに基づいて、自車両が位置認識困難区域を通過する予定時刻を求める通過予定時間演算部12と、自車両が位置認識困難区域を通るときに、GPS受信機3の感度を設定変更するように制御するGPS感度パラメータ設定部13とを有している。
(もっと読む)
車両用走行支援システム
【課題】運転者に対し渋滞を避けるべきか、最後尾につくべきかを知らせることが可能な車両用走行支援システムの提供。
【解決手段】交差点において、右折するための渋滞車列29が右折待避レーン30から直進レーン32にまで延びると、最後尾車両31が車載ナビゲーション装置の車々間通信機により、後方を走行する車両33に対して渋滞情報を発信する。渋滞情報には、渋滞車列29の先頭車両の位置、最後尾車両31の位置および進行方向が含まれている。渋滞情報を受信した走行車両33の車載ナビゲーション装置は、位置検出器により自車両33の位置が渋滞車列29のあるレーン32であることを検出し、かつ自車両33の進行方向が交差点の直進である場合には、運転者に対して走行レーンを変更して渋滞車列29を回避するように指示する。
(もっと読む)
ナビゲーション装置
【課題】自動的にアンテナ設置位置を従来技術に比較して高精度で検出し、正しく位置を測定できるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置は、測位部21と、アンテナ位置メモリ22mと、アンテナ位置推定部22と、マッチング部23とを備える。測位部21は、GPS衛星からの無線信号に基づいて現在位置を測位する。アンテナ位置メモリ22mは、前回のアンテナ位置Cpを格納する。アンテナ位置推定部22は、現在のアンテナ位置Cc及び前回のアンテナ位置Cpに基づいて算出される走行軌跡情報と、ETCゲートの位置とに基づいて、アンテナ補正値Lcを算出する。マッチング部23は、アンテナ補正値Lcを用いて現在位置を補正し、所定の地図データと補正された現在位置とに基づいて、正確な車両位置を特定するようにマッチング処理を実行する。
(もっと読む)
車線認識装置及びナビゲーション装置
【課題】車両が走行している車線の特定の確実性を向上させた「車線認識装置」、及び、当該車線認識装置により認識された車線に応じた処理を行う「ナビゲーション装置」を提供する。
【解決手段】車線認識装置100は、特徴抽出部12が、車両周辺の撮影によって得られる画像データから俯瞰画像を生成し、当該俯瞰画像における道路上の特徴部位を抽出する。不要特徴削除部18は、特徴部位のうち、白線以外に対応する道路上の特徴部位を削除し、白線認識部20が、残った白線に対応する道路上の特徴部位に基づいて白線の絶対位置を認識し、更に、車線特定部22が、車両が走行している車線を特定する。
(もっと読む)
旋回支援装置、旋回支援方法及び旋回支援プログラム
【課題】車両の回頭性を向上することができる旋回支援装置、旋回支援方法及び旋回支援プログラムを提供する。
【解決手段】道路の通行方向を含む経路データ18を記憶した地理情報記憶部17を用いて、自車両の旋回を支援するナビゲーションユニット2において、メインCPU20は、自車位置を演算し、経路データ18に基づき、自車位置の進行方向前方に、支援対象となる転回地点を検出し、自車両の転回地点での転回方向を検出し、転回地点の自車両の転回方向に基づき、自車両内輪に制動力を付加する。
(もっと読む)
ナビゲーション装置
【課題】 微小角分岐点において、自車位置マークをより正確に表示することができる「ナビゲーション装置」を提供する。
【解決手段】 本発明のナビゲーション装置は、複数のマッチング候補(道路候補)から最適な道路を決定する際に、直前にマッチングされた道路の道路名称と道路候補の道路名称とが一致するとき、その道路候補がよりマッチングされ易くなるように係数に重み付けをする。これにより、微小角交差点において、自車位置マークが他の道路に表示される不具合を回避することができる。
(もっと読む)
1 - 20 / 62
[ Back to top ]