
Fターム[2F129BB55]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | 傾斜補正 (191) | 傾斜角センサ (52)
Fターム[2F129BB55]に分類される特許
1 - 20 / 52
車載表示装置
デジタルカメラ
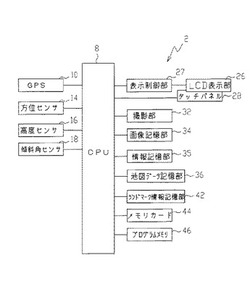
【課題】視界内のランドマークを操作者に正確に認識させることができるデジタルカメラを提供する。
【解決手段】撮影部32と、自己位置を測位する測位部10と、前記撮影部における撮影方位を計測する方位計測部14と、前記自己位置の高度を計測する高度計測部16と、前記撮影部における撮影方向の水平面に対する傾斜角度を計測する姿勢情報取得部18と、複数のランドマーク情報を記憶するランドマーク情報記憶部42と、前記撮影時における自己位置、撮影方位、高度、及び傾斜角度に基づいて、前記撮影時における自己位置を基準として撮影方位の方向に操作者が視認できるランドマーク情報を抽出する抽出部8と、前記撮影部において撮影された画像データのタグ情報として、前記撮影時における自己位置に関する情報、撮影方位に関する情報、高度に関する情報、姿勢情報、及び前記ランドマーク情報の中の少なくとも一つを記憶させる記憶制御部8とを備える。
(もっと読む)
ナビゲーションデバイスの位置を決定すること

【課題】ナビゲーションデバイスの位置を決定するための方法を提供すること。
【解決手段】ナビゲーションデバイスは、複数の異なる位置決定手順に基づいてナビゲーションデバイスの位置を決定するように適合される。各位置決定手順は、所定のパラメータセットと共に作用する。複数の地理的エリアが提供され、各地理的エリアは、位置決定手順のうちの1つに関連付けられる。ナビゲーションデバイスの近似的位置が決定され、この近似的位置に基づいて、ナビゲーションデバイスが位置している地理的エリアが決定される。決定された地理的エリアに基づいて、複数の位置決定手順のうちの1つが選択され、選択された位置決定手順に基づいて、ナビゲーションデバイスの位置が決定される。
(もっと読む)
表示制御装置、表示装置、表示制御方法、表示制御プログラムおよび記録媒体
【課題】旅行区間におけるエネルギー消費量を正確に推定し、かつ、車両の走行可能な範囲を正確に推定すること。
【解決手段】表示制御装置100は、移動体の消費エネルギーを算出して表示部110に表示する。算出部102は、移動体の稼動により消費するエネルギー消費量を要因別に算出する。判定部104は、要因別のエネルギー各々について、エネルギーが生産されているか消費されているかを判定する。表示制御部105は、判定部104により要因別のエネルギーが全て消費されていると判定された場合、所定の位置を始点としてエネルギー消費量を要因別に累積して表示する。一方、判定部104により要因別のエネルギーのうち生産されているエネルギーがあると判定された場合、所定の位置から累積した方向とは逆方向に生産されているエネルギー量だけ推移させた位置を始点として他のエネルギー消費量を要因別に累積して表示する。
(もっと読む)
エネルギー消費量推定装置、エネルギー消費量推定方法、エネルギー消費量推定プログラムおよび記録媒体
【課題】旅行区間におけるエネルギー消費量を正確に推定し、かつ、車両の走行可能な範囲を正確に推定すること。
【解決手段】走行距離推定装置100は、移動体の走行する所定の区間(以下、「旅行区間」という)における移動体の走行距離を推定する。現在位置取得部101は、移動体の現在位置を取得する。変数取得部102は、旅行区間における移動体の速度に関する情報を取得する。推定部103は、消費エネルギー推定式に基づいて、旅行区間を走行する際のエネルギー消費量や走行可能距離を推定する。補正部104は、消費エネルギー推定式の変数として用いる移動体に関する情報を補正する。記憶部105は、移動体の走行履歴にかかる道路に関する情報を記憶する。表示部110は、推定部103によって算出された走行可能距離に関する情報を含む地図データを表示する。
(もっと読む)
エネルギー消費量推定装置、エネルギー消費量推定方法、エネルギー消費量推定プログラムおよび記録媒体
【課題】旅行区間におけるエネルギー消費量を正確に推定し、かつ、車両の走行可能な範囲を正確に推定すること。
【解決手段】走行距離推定装置100は、移動体の走行する所定の区間(以下、「旅行区間」という)における移動体の走行距離を推定する。現在位置取得部101は、移動体の現在位置を取得する。変数取得部102は、旅行区間における移動体の速度に関する情報を取得する。推定部103は、消費エネルギー推定式に基づいて、旅行区間を走行する際のエネルギー消費量や走行可能距離を推定する。補正部104は、消費エネルギー推定式の変数として用いる移動体に関する情報を補正する。記憶部105は、移動体の走行履歴にかかる道路に関する情報を記憶する。表示部110は、推定部103によって算出された走行可能距離に関する情報を含む地図データを表示する。
(もっと読む)
坂道検出装置、坂道検出方法、及び現在位置表示装置
【課題】移動体の走行路が坂道であるか否かを迅速且つ正確に検出することのできる坂道検出装置及び検出方法を提供する。
【解決手段】移動体の走行路が坂道であるか否かを検出する坂道検出装置において、気圧を検出する気圧検出手段12と、角速度又は加速度を検出する角速度/加速度検出手段13、14と、前記気圧検出手段12により検出した前記気圧と、前記角速度/加速度検出手段13、14により検出した前記角速度又は前記加速度とに基づき、前記移動体の前記走行路が坂道であるか否かを判定する坂道判定手段19と、を備える。
(もっと読む)
地図更新システム
【課題】新規道路か否かを正しく判定する。
【解決手段】地図を記憶する地図記憶手段と、測位信号電波を受信し、測位信号に基づいて移動体の地図上の位置を検出する第1の位置検出手段21,24,28,29と、移動体の挙動を検出し、挙動に基づいて移動体の地図上の位置を検出する第2の位置検出手段21,28,31と、測位信号電波の受信可否を検出する受信可否検出手段23と、第1または第2の位置検出手段により検出された地図上の位置と測位信号電波の受信可否とに基づいて、移動体が移動している道路が地図記憶手段28に記憶されていない新規道路か否かを判定する新規道路判定手段21とを備える。
(もっと読む)
位置検出システム、方法、記憶媒体、及びプログラム
【課題】投射光領域の輪郭が不明瞭な場合でも、移動体の正確な位置を検出する。
【解決手段】移動体の位置を検出する位置検出システムであって、天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手段と、前記投射光の画像領域の重心位置を算出する算出手段と、前記重心位置を床面の前記移動体の位置へと変換する位置変換手段とにより達成される。
(もっと読む)
GNSS受信機、航法装置、信号処理装置、GNSS速度補正プログラム及びGNSS速度補正方法
【課題】アンテナの動揺による速度測定値の誤差を遅延無く除去することが可能であり、しかも特別な設定作業等を行う必要が無いGNSS受信機を提供する。
【解決手段】本実施形態のGPS受信機2は、GPSアンテナ4と、GNSS位置・速度算出部11と、磁気方位センサ5と、傾斜センサ6と、動揺速度除去部15と、を備えている。GPSアンテナ4は、船舶に取り付けられ、GPS衛星からの測位用信号を受信する。GPS位置・速度算出部11は、測位用信号に基づいて、GPS速度を算出する。磁気方位センサ5は、船舶の船首方向の絶対方位を検出する。傾斜センサ6は、GPSアンテナ4の傾斜角を検出する。動揺速度除去部15は、絶対方位及び傾斜角に基づいて、GPSアンテナ4の動揺による誤差を算出してGPS速度から除去する。
(もっと読む)
ナビゲーション装置
【課題】道路傾斜による影響を排除し取付角度を正確に求めることができるナビゲーション装置を提供することを目的とする。
【解決手段】車両に取付をした取付台に任意の角度で設置することができるナビゲーション装置1であって、互いに直交する3つの軸の各方向の加速度を検出する3軸加速度センサ4と、ナビゲーション装置1の取付角度を算出する制御部2とを備え、制御部2は、3軸加速度センサ4が車両走行中に検出した加速度の2つの軸についてそれぞれの方向の加速度である第1および第2加速度を取得し、この第1および第2加速度の絶対値の比率および加速度の極性により取付角度を算出する。
(もっと読む)
地図表示装置、制御方法、プログラム、及び記憶媒体
【課題】分岐地点通過後に車両が走行した道路を適切に特定可能な地図表示装置を提供する。
【解決手段】地図表示装置は、車両などの移動体に設置され、記憶部と、傾斜角度計測手段と、走行道路特定手段と、判定手段と、傾斜角度記憶手段と、を備える。記憶部は、地図情報を記憶する。傾斜角度計測手段は、移動体が走行した道路の傾斜角度を計測する。走行道路特定手段は、複数の分岐後道路に分岐する分岐地点を通過する場合であって、当該分岐後道路のうち少なくとも1の道路の傾斜角度が記憶部に記憶されていた場合、当該傾斜角度と、傾斜角度計測手段により計測された計測傾斜角度と、に基づき、分岐後道路から、前記移動体の走行道路の特定を行う。判定手段は、傾斜角度に基づく走行道路の特定が誤りであるか否か判定する。傾斜角度記憶手段は、傾斜角度に基づく走行道路の特定が誤りであると判断した場合、計測傾斜角度を記憶部に記憶させる。
(もっと読む)
車両経路判定方法およびナビゲーション装置
【課題】走行中の道路を迅速かつ精度よく特定できる車両経路判定方法およびナビゲーション装置を提供すること。
【解決手段】自車両の現在位置がランプ区間に入っていると、そのランプ区間の分岐道路の分岐経路傾斜属性101と、前記分岐道路が分岐している高速道路本線の本線経路傾斜属性102とを記憶部13から読み出す。そして、分岐経路傾斜属性101、本線経路傾斜属性102および判定される傾斜属性103に対応して判定結果104が設定されたテーブルTBLを、傾斜算出部6で判定された傾斜属性103と、記憶部13から読み出した分岐経路傾斜属性101と本線経路傾斜属性102とをもとに参照し、現在走行中の道路が分岐道路(ランプ)であるか本線側であるかの判定結果104を取得する。
(もっと読む)
停車判定装置、停車判定方法、停車判定プログラム及び記憶媒体
【課題】早期に停車認定を行うことが可能な停車判定装置を提供する。
【解決手段】停車判定装置は、加速度取得手段と、勾配推定手段と、標本選定手段と、統計量算出手段と、停車判定手段と、を備える。加速度取得手段は、車両の加速度を取得する。加速度取得手段は、車両の前後方向の加速度を取得する。勾配推定手段は、車両の走行中又は停車中の道路勾配を推定する。勾配推定手段は、車両の上下方向の加速度によって勾配を推定する。標本選定手段は、道路勾配に基づき車両が停車した場合の前後方向の加速度の推定範囲を算出し、当該推定範囲に基づき前後方向の加速度を選定する。統計量算出手段は、所定時間幅にわたる選定された加速度の統計量を算出する。停車判定手段は、統計量と所定の閾値とに基づき、車両が停車中であるか否か判定する。
(もっと読む)
方位センサの補正係数演算装置及び演算プログラム
【課題】方位変更の前後におけるGPS情報と方位センサ情報とに基づいて、方位センサ情報を補正するための補正係数を演算する場合において、方位センサの静的な設置角度及びその設置角度の動的な変化を考慮した動的補正係数を適切に演算することが可能な方位センサの補正係数演算装置等を提供する。
【解決手段】方位変更の前後におけるGPS方位変化量とセンサ方位変化量との差異に基づいて、方位センサ情報の基本補正係数を演算し、方位センサ4の検出軸Xの静的な設置角度αに応じて基本補正係数を補正した静的補正係数を演算し、方位センサ4の検出軸X方向の動的変化角度βに応じて、静的補正係数を動的に補正して動的補正係数を演算する。
(もっと読む)
車載用表示システム及び表示方法
【課題】車両の姿勢及び方位と背景との傾きの差による違和感を低減した車載用表示システム及び表示方法を提供する。
【解決手段】表示オブジェクトを有する映像を含む光束を観視者の片目に向けて投影する映像投影部と、前記観視者が搭乗する車両の姿勢及び方位の少なくともいずれかの角度に関する車両角度情報、及び、前記車両の外界の背景における前記表示オブジェクトのターゲットの位置での背景物の角度に関する外界角度情報の少なくともいずれかを取得する角度情報取得部と、を備え、前記映像投影部は、前記角度情報取得部によって取得された前記車両角度情報及び前記外界角度情報の少なくともいずれかに基づいて、前記表示オブジェクトの前記映像内における角度を変化させることを特徴とする車載用表示システムを提供する。
(もっと読む)
道路情報取得装置
【課題】自車両の走行経路の道路情報を精度よく取得することのできる道路情報取得装置を提供する。
【解決手段】自車両が走行する走行経路の道路標高や道路勾配を取得する際、通常の道路については地表標高に基づいて第一道路情報を演算する一方、トンネル、高架、橋、盛土道路、切土道路などの構造物が存在すると判定された場合の道路については、予め蓄積された第一道路情報とは異なる第二道路情報を取得する。構造物は、道路が地表に沿っておらず、地表標高と道路標高の差が大きくなってしまうため、地表標高に基づいて演算した場合は正確な第一道路情報を取得することはできないが、当該構造物の道路については予め蓄積された第二道路情報で補間することによって、自車両の走行経路の道路情報を精度よく取得する。
(もっと読む)
センサ誤差補正装置及び方法、傾斜測定装置並びにアンテナ制御システム
【課題】微小な傾斜角度に関しても傾斜センサで高精度に検出可能とするためのセンサ誤差補正装置及び方法、傾斜測定装置、並びにアンテナ制御システムを提供する。
【解決手段】センサ誤差補正装置100は、傾斜センサ200を設置平面内で回転させる駆動部101と、傾斜センサ200の出力電圧が最大値又は最小値を示す回転角に対して90度ずれた回転角を算出する基準角度検出部102と、算出した回転角における出力電圧を基準値として傾斜センサ200の出力を補正する出力補正部103とを有する。
(もっと読む)
携帯型ナビゲーション装置
【課題】正確な移動距離や移動方向を検出して、正確な現在位置を検出すること。
【解決手段】加速度センサ(SN3)で検出した加速度のデータに基づいてユーザが歩行しているか否かを検出する歩行検出手段(KC13)と、前記加速度データに基づいて、ユーザの歩行の1周期分の加速度の履歴があったか否かを検出する歩行周期検出手段(KC18)と、ユーザが歩行を停止しているか否かを判別するための停止判別時間の間、前記歩行検出手段(KC13)が歩行を検出しなかったか否かを判別する停止判別手段(KC14)と、前記停止判別手段(KC14)により歩行を検出しなかったと判別された場合に、速度検出記憶手段(KC12)に記憶された前記移動速度を0とする速度リセット手段(KC15)と、を有する携帯型ナビゲーション装置。
(もっと読む)
勾配情報演算装置、車両走行制御装置、ナビゲーションシステム
【課題】道路の勾配値を高密度に取得可能な勾配情報演算装置、ナビゲーションシステム、及び、車両走行制御装置を提供すること。
【解決手段】自律航法により3次元上の位置情報を検出し、所定時間に、移動した移動距離と、移動距離を水平面に投影した平面距離とに基づき、第1の勾配値Bを演算する第1の演算手段14と、道路を、位置情報の知られたノードと、ノードを連結したリンクとにより表現する道路地図情報を記憶する道路地図情報記憶手段17と、予め計測されている標高データからノードの標高を推定し、ノード間の標高差及びリンク長から第2の勾配値Aを演算する第2の演算手段16と、第1の勾配値と第2の勾配値を比較して、その偏差に応じて、第1又は第2の勾配値のいずれを該リンクの勾配値に採用するかを決定する勾配データ選択手段と、を有することを特徴とする勾配情報演算装置を提供する。
(もっと読む)
1 - 20 / 52
[ Back to top ]