
Fターム[2F129BB57]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | 入れ替え (140)
Fターム[2F129BB57]に分類される特許
1 - 20 / 140
情報処理装置、受信情報サーバ、情報処理方法、プログラム、及び記録媒体
【課題】測位する場所毎に、より適切な動作条件を用いることによって消費電力を低減することができる測位装置を提供する。
【解決手段】情報処理装置は、測位衛星から受信する測位信号に基づいて測位する衛星測位部と、現在地に固有な環境情報を取得する環境情報取得部と、上記環境情報に基づいて、上記現在地における上記測位信号の状態を示す受信情報を取得する受信情報取得部と、上記受信情報に基づいて、上記衛星測位部の動作条件を設定する動作条件設定部と、を有する。
(もっと読む)
密結合GPSおよび推測航法車両航法用のロードマップ・フィードバック・サーバ

【課題】車両における全地球測位システム受信機および推測航法の密結合の組合せを無線ネットワーク・サーバによって行い、実用的なロードマップ補正フィードバックを実現する。
【解決手段】ロードマップ・フィードバックは、車両レンジおよび方向を演算するために、車両のCANbusネットワーク上の車輪速度トランスデューサのデータを収集する密結合GPSおよび推測航法システムにおいて使用される。ネットワーク・サーバによって提供される道路セグメント情報は、補正可能なフィードバックを導出することができるように、現在の航法解にテンプレートされた制約をデータベースに提供する。推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解のギャップを埋める。ロードマップの適合は、長い推測航法単独の動作の期間に蓄積されるドリフトを制御する。
(もっと読む)
ナビゲーション装置
【課題】屋内送信機から送信された位置情報を受信した際にも、精度良くユーザーに違和感の少ない現在位置を表示できるナビゲーション装置を提供する。
【解決手段】GPS受信機1が算出した位置がGPS衛星を受信して算出した位置なのか、屋内送信機から送信される位置情報を受信したのか判定するGPS種別判定部21と、GPS受信機1からの位置情報および方位検出装置3で算出される方位と、速度検出装置4で算出される速度と、記憶装置5で記憶される地図データベースを用いて位置を決定する測位部23と、屋内送信機から送信される位置情報について、その位置情報が示す場所を走行した時刻を推定する屋内位置推定部22を備え、測位部23は該推定された時刻および屋内送信機から受信した位置情報を用いて決定した位置を補正する。
(もっと読む)
慣性航法システムのための誤差修正を備えた方法、装置、およびシステム
【課題】慣性航法システムのための誤差修正方法を提供する。
【解決手段】この方法は、移動対象の現在の位置決めパラメータ、航法マップに基づく基準位置決めパラメータ、およびGPSに基づく基準位置決めパラメータに基づいて慣性航法システムの動作状態を決定するステップと、慣性航法システムの初期パラメータをGPSに基づく基準位置決めパラメータに置き換えるステップと、慣性航法システムが異常動作状態にあると決定された場合、慣性航法システムを初期状態にリセットするステップとを有する。
(もっと読む)
密結合GPSおよび推定車両航法
【課題】密結合GPSおよび推測航法システムは、車両ネットワーク上の車輪速度トランスデューサのデータを収集し、車両範囲および方向を演算する。
【解決手段】推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解におけるギャップを埋める。車輪半径の連続的なキャリブレーションおよび速度効果に対する補正は、GPS fixから演算され、それは、GPS信号受信の長い休止期間中の推測航法性能および精度を改善する。GPS信号が回復されるとき、本推測航法解は、周囲を探索するGPS受信器のための高品位な開始点を提供する。
(もっと読む)
進行方位算出装置、進行方位算出方法及び進行方位算出プログラム並びにナビゲーション装置
【課題】進行方位を精度良く算出できるようにする。
【解決手段】本開示の進行方位算出装置は、使用者の歩行に伴い発生する加速度のうち、鉛直方向の加速度を表す鉛直加速度と、水平面内における加速度の方位及び大きさを表す水平加速度とを検出する検出部と、鉛直加速度のゼロクロス点を基に、使用者の2歩に相当する期間を歩行周期として設定する歩行周期設定部と、歩行周期内において、水平加速度の大きさが極小となる位相を基に、使用者の進行方向への加速と減速とが切り替わる加減速切替位相を設定する加減速切替位相設定部と、加減速切替位相毎に区切られた各区間を交互に加速区間又は減速区間として推定する加減速区間推定部と、減速区間では水平加速度が表す方位に基づき、加速区間では水平加速度が表す方位と反対の方位に基づき、使用者の進行方位を決定する進行方位決定部とを設けるようにした。
(もっと読む)
ADS−B送信の受信からの状態ベクトル、タイミングおよびナビゲーション品質値の決定
【課題】空中、海上または地上ベースのプラットフォームにおけるモバイルデバイスの位置決定方法の提供。
【解決手段】モバイルデバイスにおいて複数のメッセージを複数のモバイル基準デバイスから受信することであって、各メッセージは、基準時間に対して既知のタイミングを有している複数のMSO時刻のうちの1つで始まり、各メッセージを送信するモバイル基準デバイスに対する位置情報と、各メッセージの送信が開始されるMSO時刻を示すMSO値とを含むことと、モバイルデバイスにおいて受信される各メッセージの受信の時間を決定することと、モバイルデバイスにおいて受信される各メッセージの送信の時間を決定するためにMSO値を用いることと、各メッセージの送信の時間および受信の時間と、モバイル基準デバイスに対する位置情報とに基づいてモバイルデバイスの位置を多辺測量により決定することとを含む、モバイルデバイスの位置を決定する方法。
(もっと読む)
移動端末及び移動経路算出プログラム
【課題】移動経路の算出精度を維持しつつ、消費電力を低減する。
【解決手段】絶対位置検出部30が移動端末100の絶対位置を検出した結果と、リンク情報生成部22が移動端末の直進距離を示す線分(リンク)を生成した結果と、に基づいて、移動経路算出部24が移動経路を算出する。この場合に、移動経路算出部は、移動経路を算出する際に、リンク情報生成部22が取得したリンクの長さを補正するための補正パラメータr1、r2、r3、…、と、リンクの方向(角度t1、t2、t3、…)とを絶対位置検出部30が検出した絶対位置と、絶対位置を検出したときに移動端末が移動していたリンク上の点との距離に基づいて算出する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 予め決められた地点へ移動したり、予め決められた地点を通過したりする場合に、この地点の正確な位置データを測位結果に反映できる測位装置、測位方法およびそのプログラムを提供する。
【解決手段】 測位衛星を利用した間欠的な絶対位置の測定とモーションセンサによる連続的な相対変位の測定とに基づいて現在の推定位置を算出する位置算出手段(S2〜S6)と、地点登録手段と、位置算出手段により算出された推定位置が登録地点から所定範囲内にあるか否かを判定する位置範囲判定手段(S14)と、登録地点に到達した可能性のある所定状態の判別を行う到達状態判別手段(S15)と、位置範囲判定手段により前記所定範囲内と判定され、且つ、到達状態判別手段により前記所定状態であると判別された場合に、登録地点を現在の絶対位置に決定する現在位置決定手段(S16)とを備えている。
(もっと読む)
マルチセンサデータの収集/処理
【課題】加速度、角速度、磁界センサ等のマルチプルセンサからのセンサデータを収集し、および/または処理する。
【解決手段】プロセサ120と、プロセサに接続される1以上のセンサ130、140と、プロセサに接続され、外部センサからの計測情報を受信する無線インターフェースユニット110を備え、プロセサは計測情報に基づいて1以上のナビゲーション状態を評価することに用いられるマルチセンサ計測処理ユニット100。
(もっと読む)
マルチセンサデータの収集/処理
【課題】加速度、角速度、磁界センサ等のマルチプルセンサからのセンサデータを収集し、および/または処理する。
【解決手段】マルチセンサ計測処理ユニット300が付随する加速度計340と、マルチセンサ計測処理ユニット300に接続される外部の幾何学センサ370を備え、マルチセンサ計測処理ユニット300が、加速度計340および幾何学センサ370からのセンサデータに基づいて動きを検出し、加速度計340からの横揺れおよび縦揺れのセンサデータに基づいて幾何学センサ370の傾きを補償する。
(もっと読む)
位置算出方法及び電子機器
【課題】位置算出用モジュールを搭載した電子機器における位置算出主体の適正化。
【解決手段】GPS処理部10と、GPS処理部10よりも演算処理能力の高いホスト処理部30とを備えた携帯型電話機1において、GPSアンテナ5は、GPS衛星から送出されるGPS衛星信号を受信する。GPS処理部10は、GPSアンテナ5が受信した信号に対する衛星サーチを行い、位置算出の基礎情報とするメジャメント情報を算出する。そして、ホスト処理部30は、GPS処理部10がメジャメント情報に基づいて位置算出するセルフモードと、ホスト処理部30がメジャメント情報に基づいて位置算出するホストモードとを、記憶部100に記憶されたモード切替条件テーブル103に従って切り替える。
(もっと読む)
測位切替制御システム、サーバ装置、端末装置、測位切替制御装置、測位切替制御方法、および、プログラム
【課題】予め記憶した測位可能なエリアに基づいて測位手段の切替判定を行いながら利用者の要求を反映させることができる、測位切替制御システム、サーバ装置、端末装置、測位切替制御装置、測位切替制御方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、測位手段を介して位置情報を取得し、取得した位置情報、および、当該位置情報を取得するために使用した測位手段の種別を特定する種別情報に対応する、切替関連情報に規定された測位手段毎に切替可能な切替可能範囲に基づいて、測位手段の切替が可能か否か判断し、切替可能と判断した場合に、入力部を介して利用者に測位手段を切替えるか否かを選択させ、利用者により切替が選択された場合に測位手段を切替える。
(もっと読む)
ナビゲーション装置
【課題】携帯装置のバッテリの電力消費を抑制しつつ、必要充分な程度に、現在位置算出の精度を向上することができる「ナビゲーション装置」を提供する。
【解決手段】ナビゲーション装置1のカーナビゲーションアプリケーションは、ユーザに現在位置や現在進行方向を提示する案内画像が表示されているときには、スマートフォン2のGPS受信機28の測位データとナビゲーション装置1のGPS受信装置17の測位データとの双方を用いた比較的高精度な算出が期待できる手法で現在位置や現在進行方向を算出する。一方、案案内画像が表示されていないときには、ナビゲーション装置1のGPS受信装置17のGPSの測位データのみを用いて現在位置や現在進行方向を算出しつつ、スマートフォン2のGPS受信機28をシャットダウンしてスマートフォン2の電力消費を抑制する。
(もっと読む)
運転支援装置
【課題】GPS非受信区間において、ステレオカメラやLRFなどの距離を計測する距離センサを用いて加速度センサのバイアスを補正する際に、車両の加速度,姿勢の影響により距離センサにノイズが生じ、精度良くバイアスを推定することが難しい。
【解決手段】レーザーレンジファインダやステレオカメラなどの距離センサを用いて、車両周辺に存在する物体表面の複数の点までの距離を計測し、距離センサによる計測分解能が所定の精度以上となる計測範囲を定める最大計測範囲決定手段と、最大計測範囲内で計測した点から特徴点を求める特徴点検出手段と、距離の変動から車両の挙動を逆算する車両並進・回転角計算手段から得られる自車の挙動と、加速度センサの計測値から加速度センサのパラメータを推定するセンサパラメータ推定手段により、加速度センサのバイアスを精度良く推定する。
(もっと読む)
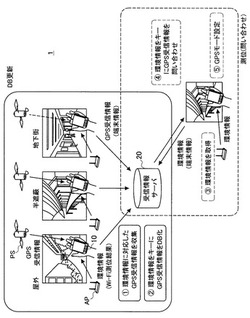
測位装置、及び測位方法
【課題】様々な場所でできるだけ正確な位置を測位できるようにする。
【解決手段】
航法衛星システムの複数の衛星から送信された衛星信号を受信して現在位置を示す位置情報を演算するものであって、高感度と低感度の衛星信号受信機能を有し、高感度の衛星信号受信機能を使って演算された高感度での位置情報と、低感度の衛星信号受信機能を使って演算された低感度での位置情報とを、選択的に又は並行的に出力する航法衛星センサと、航法衛星センサから前記高感度での位置情報と低感度での位置情報とを選択的に又は並行的に取得して、高感度での位置情報と低感度での位置情報のいずれか一方を、移動体の現在位置を示す現在位置情報として選択する測位制御装置と、を備える測位装置。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 絶対位置データが得られないまま自律航法の測位が行われ、その後に、絶対位置データが取得された場合でも、始端からの一連の位置データを正確に求められる測位装置、測位方法およびプログラムを提供する。
【解決手段】 絶対位置が不明な状態で自律航法の測位手段により一連の相対変位データ(La0)が取得され、この取得後に測位衛星により複数地点の絶対位置データ(B1,C2)が取得された場合に、一連の相対変位データ(La0)を、その後に取得された絶対位置データ(B1)に基づき、絶対位置にそれぞれ対応づけて一連の位置データ(La1)に変換するとともに、絶対位置データ(B1,C2)が取得された複数地点間の一連の位置データ(Lb1)に対して行った補正と同一のパラメータを用いて、絶対位置が不明な状態で取得された一連の位置データ(La1)を補正する。
(もっと読む)
自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法
【課題】車両の進行方位が道路の延在方位と異なる場合であっても推定自車位置を適切に補正することが可能な自車位置認識システム及び自車位置認識プログラムを実現する。
【解決手段】道路の延在方位EDに平行な方位を基準方位SDとして設けられた路面上の地物を対象地物Mとして、撮影画像に含まれる対象地物Mの画像認識処理を行う画像認識部と、画像認識部により認識された対象地物Mと自車両100との相対方位RDと、自車両100の進行方位MDとに基づき、対象地物Mの基準方位SDを特定する基準方位特定部と、推定自車位置EPの周辺の道路情報に基づき、基準方位特定部により特定された基準方位SDと延在方位EDが一致する道路上の位置である地物方位一致位置P0を検出し、当該地物方位一致位置P0に基づき推定自車位置EPを補正する地物利用自車位置補正部と、を備える。
(もっと読む)
歩行状況検出装置、歩行状況検出方法及び歩行状況検出プログラム
【課題】リアルタイム性を確保しながら携帯箇所によらずに使用者の歩行の状況を精度良く検出できるようにする。
【解決手段】スマートフォン1の制御部2は、鉛直加速度値A3の波形を基に着地半波HWを検出し、着地半波長T2に対する着地半波間隔T1の比率である着地半波比率Rを算出して比閾値THと比較する。このとき制御部2は、着地半波比率Rが比閾値TH未満であれば着地半波HWが1歩に相当するものと判定し、それ以外の場合は2歩に相当するものと判定し、その判定結果に基づき連続歩数WC及び累積歩数WS等の値を更新して歩行情報Fを生成する。これによりスマートフォン1は、その携帯箇所が上半身又は下半身のいずれであるかに関わらず、使用者が歩行したこと及びその歩数を1歩目から精度良く検出することができる。
(もっと読む)
車椅子利用者用ナビゲーション装置
【課題】GPSの受信不可能な駅構内でも、自車位置検知手段として、車いすに装着されたセンサでのみ行う自立航法で行い、これにより検知された自車位置に基づきバリアフリー経路を誘導案内することを可能とする。
【解決手段】駅の出入り口とホーム間、異なるホーム間バリアフリー経路を1つのリンクとして扱い、そのリンク上に設けられた誘導案内ポイント付近に接近した場合、当該誘導ポイント周辺光景の実画像情報を表示し、利用者が当該誘導ポイントに到着し、確認操作を行った時点で自車位置を誘導ポイントに設定補正する。
(もっと読む)
1 - 20 / 140
[ Back to top ]