
Fターム[2F129BB62]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 衛星による測位不良時 (525)
Fターム[2F129BB62]の下位に属するFターム
Fターム[2F129BB62]に分類される特許
81 - 100 / 142
測位システムおよび車載装置
【課題】車両の走行時における測位精度を向上させること。
【解決手段】車載装置が、測位した座標を表す車載側測位座標および測位に係る精度を表す車載側測位精度を取得し、取得した車載側測位座標および車載側測位精度を携帯端末装置へ送信し、携帯端末装置は、測位した座標を表す携帯側測位座標および測位に係る精度を表す携帯側測位精度を取得し、車載側測位精度および携帯側測位精度に基づき、車載側測位座標および携帯側測位座標から車両位置を算出するように測位システムを構成する。
(もっと読む)
GPS測位装置及びGPS測位方法

【課題】GPS受信機側に新旧の衛星情報が混在する場合であっても、適切な測位演算が可能なGPS測位装置及び測位方法を提供することを目的とする。
【解決手段】複数のGPS衛星から定期的に受信した前記複数のGPS衛星の各々の最新の衛星情報を記憶する衛星情報記憶手段と、前記衛星情報記憶手段により記憶された前記複数のGPS衛星の各々の最新の衛星情報に、最新の衛星情報と最新ではない前回受信時の衛星情報が混在して記憶されているか否かを判断する新旧混在判断手段と、前記新旧混在判断手段による判断結果に応じて、当該GPS測位装置の位置座標を測位演算する測位演算手段とを有することを特徴とするGPS測位装置。
(もっと読む)
測位方法、プログラム、測位装置及び電子機器
【課題】カルマンフィルタを用いた測位処理で使用する測定誤差を適切に設定すること。
【解決手段】GPS衛星からのGPS衛星信号を捕捉する捕捉処理が実行されて距離相当
値が測定される。また、捕捉したGPS衛星信号の信号強度に基づいて当該捕捉衛星につ
いての位置補正処理で用いる位置R値の初期値が設定されるが、当該捕捉衛星の観測値「
Z」が、GPS衛星からのGPS衛星信号の受信環境に基づいて設定された適否判定条件
により不適と判定される場合は、位置補正処理で用いる位置R値が初期値より大きな値に
設定される。
(もっと読む)
ナビゲーション装置
【課題】ナビゲーション装置において、進行方向と地磁気センサの向きとのズレを補正して精度良く位置を求める。
【解決手段】GPS部11および磁気センサ12による計測結果に基づいて進行方向φと磁気センサ12が向いている方位θとの差分を求め、該求めた差分によって磁気センサ12により求めた方位θの補正を行う方位補正部101と、補正後の方位θ’とGPS部11による過去の計測結果である位置PGPSおよび速度Vとに基づいて現在の位置PMAGを算出する位置算出部102と、を備える。
(もっと読む)
ナビゲーション装置
【課題】車両位置がマッチングされた道路と実際に車両が走行している道路とが異なる場合に、容易にマッチング位置を正しい道路に修正できるようにする。
【解決手段】ナビゲーション装置1は、車両速度を含む車両情報を検出する車両情報検出手段19と、車両情報検出手段19から車速情報またはブレーキ情報の何れか一方または両方を取得するとともに、更に他の情報を取得する比較対照情報取得手段20と、マッチング正誤判別手段18と、を備え、マッチング正誤判別手段18は、比較対照情報取得手段20が取得した比較対照情報を用いてマッチング位置の正誤を判別し、マッチング位置に誤りがあると判別した場合、マッチング制御手段15は、マッチング位置を修正する。判別不能の際は、マッチング位置の確認または修正のためのメッセージを表示する。
(もっと読む)
現在位置算出装置および車両
【課題】現在位置算出装置の現在位置精度を向上させる。
【解決手段】ABS用加速度センサ12a〜12d自体の傾斜角度θa〜θdを算出し、道路に対する車両10の傾斜角度αの影響を排除するように、加速度センサ11bのオフセット電圧の補正を行う。これにより、加速度センサ11bで検出される加速度に基づいて、車両10が走行する道路の傾斜角度θが正しく算出されて、車両10の高さ位置が正しく算出されるようになる。したがって、車両の現在位置が正しく算出されるようになり、カーナビゲーション装置1の現在位置算出精度を向上できる。
(もっと読む)
衛星測位システム(SPS)信号の測定処理用の方法および装置
【課題】多様な種類の入手可能なデータを活用し、最適場所解を得る。
【解決手段】対応する複数のSPS衛星からのSPS信号が、SPS受信機で受信される。SPS受信機の場所に対応する信号環境が特徴付けられ、信号環境データが生成される。例えば、GPS受信機の近似場所を考慮して、セルラーネットワークベースのデータベース等の情報源が探索され、信号環境データを検索する。この近似場所は、GPS受信機と同じ場所に配置されるセルラー通信装置とセルラー無線通信しているセルサイトの場所によって指定されてよい。衛星信号の信号特徴に関連するパラメータが定義され、パラメータの閾値は信号環境データを用いて求められる。複数の衛星からの衛星信号の到着時刻に対応するコードフェーズが測定される。測定されたデータが、GPS受信機の場所修正が計算される到着時刻の集合を生じさせるためにパラメータの閾値を使用して調べられる。
(もっと読む)
ナビゲーション装置
【課題】現在位置の検出に要するGPS信号を受信できない場合であっても、より適切な経路案内を行うことができるナビゲーション装置を提供する。
【解決手段】地図情報取得手段(地図情報取得プログラム74b等)は地図情報を取得し、GPSアンテナ部1はGPS信号を受信し、現在位置検出手段(現在位置検出プログラム74a等)は、受信されたGPS信号に基づいて現在位置を検出し、経路探索手段(経路探索プログラム74c等)は目的地までの経路を探索し、経路案内手段(経路案内プログラム74f)は、検出される現在位置を含む地図情報を表示部5に表示し、探索された経路に関する経路案内を行う。また、経路案内手段は、所定数以上のGPS信号が受信できない間、所定数以上のGPS信号が受信できなくなった位置を含む地図情報を、時間の経過とともに次第に広域表示に変更して、表示部5に表示する。
(もっと読む)
移動体周辺情報取得装置
【課題】移動体の位置を随時適当に補正しながら周辺情報を搭乗者等のユーザに提供する移動体周辺情報取得装置を得る。
【解決手段】移動体1に搭載されている速度発電機2の出力電圧を入力した計算部3が移動体1の位置を示すデータを求め、このデータを無線部4が小電力無線通信によって送信し、通信部4からの移動体1の位置を示すデータを端末5の情報通信部10が受信して、制御部12の速度発電機情報補正部21がGPSデータを用いて移動体1の位置を示すデータを補正し、補正した位置の周辺情報を位置関連情報検索表示部23がデータベース14を検索して表示部13に表示する。
(もっと読む)
現在位置測位方法、プログラム、記憶媒体、測位装置及び電子機器
【課題】1回の測位において複数の衛星組それぞれについて測位演算を行う場合に、測位位置の算出に要する演算量を短縮すること。
【解決手段】各衛星組について推定現在位置を算出する推定演算を2回行い、2回目の推定演算による推定現在位置を当該衛星組についての現在位置候補とする。このとき、1つ目の衛星組については、1回目の推定演算では、算出した各GPS衛星の衛星位置及び推定擬似距離をキャッシュに保存し、2回目の推定演算では、各GPS衛星の衛星位置をキャッシュから読み出して取得する。2つ目以降の衛星組については、1回目の推定演算では、各GPS衛星の衛星位置及び推定擬似距離をキャッシュから読み出して取得し、キャッシュに保存されていないGPS衛星については、算出して取得するとともにキャッシュに保存し、2回目の推定演算では、各GPS衛星の衛星位置をキャッシュから読み出して取得する。
(もっと読む)
初回測位出力位置演算決定方法、プログラム、記憶媒体、測位装置及び電子機器
【課題】初回の測位結果の出力の際に、測位精度の向上とTTFFの短縮とのどちらを優先させるかを、受信環境に応じて適切に判断すること。
【解決手段】初回の測位では、捕捉されたGPS衛星信号を基に現在位置を算出する測位処理(ステップA3)を複数回繰り返し実行する。測位処理の実行毎に、算出した今回の測位位置と前回の測位位置との差(位置差分)ΔPが、連続して所定値以下である回数を位置カウンタで計数するとともに、今回の時刻誤差と前回の時刻誤差との差(時刻差分)ΔTが、連続して所定値以下である回数を時刻カウンタで計数する(ステップA5)。また、APR平均値に応じた変更量で基準閾値を変更することで、位置閾値及び時刻閾値を決定する(ステップA7)。そして、位置カウント値が位置閾値に達し(ステップA9:YES)、且つ時刻カウント値が時刻閾値に達したならば(ステップA11:YES)、今回の測位位置を初回の測位位置として決定し出力する(ステップA13)。
(もっと読む)
現在位置測位方法、プログラム、記憶媒体、測位装置及び電子機器
【課題】複数の衛星組のうちから、測位精度が良い衛星組を適切に判断し選択可能とすること。
【解決手段】各衛星組の現在位置候補に対する評価点Eを、当該衛星組の帰納的残差APR(APR値)、PDOP値及び衛星数を基に次式に従って算出する。
E=k1・f1(APR)+k2・f2(PDOP)+k3・f3(衛星数)
このとき、評価関数f1〜f3それぞれを重み付ける評価係数k1〜k3を、APR平均値に基づいて決定する。
(もっと読む)
測位システム、測位用ICチップ、測位方法及び測位プログラム
【課題】 より少ない信号発信源を用いて容易に測位精度を評価する。
【解決手段】 受信機10は、自機10の位置を推定する測位システムであって、複数のGPS衛星20から送信され信号受信部11によりに受信された信号に基づいて各GPS衛星20と受信機10との間の各距離を示す情報を産出する距離算出部12と、各GPS衛星20の位置を示す情報、及び算出された上記各距離を示す情報から、受信機10の位置を算出する位置算出部13と、算出された受信機10の位置から各GPS衛星20までの各距離と距離算出部12により算出された各距離との差分をGPS衛星20毎に算出する距離差分算出部14と、算出されたGPS衛星20毎の差分の、GPS衛星20間でのばらつきに基づいて、算出された受信機10の位置の精度を評価する位置精度評価部15と、を備える。
(もっと読む)
位置特定装置、位置特定方法および位置特定プログラム
【課題】車両位置を高精度に算出することを目的とする。
【解決手段】擬似距離測位部210は擬似距離測位により測位位置Aを得る。白線データ取得部221は測位位置Aの周辺に位置する各白線の三次元座標データを取得する。白線データ撮像面投影部222は各白線データをカメラ撮像面に投影する。映像白線抽出部223はカメラ映像から白線を抽出する。特徴量投影部224は各撮像面白線データと映像白線データとの特徴量を算出し、特徴量相関係数算出部225は各撮像面白線データを映像白線データと比較し、相関係数判定部226は映像白線データに対応する撮像面白線データを特定する。車両位置算出部227は、カメラ映像における当該白線の二次元位置に当該白線データが示す三次元座標を当てはめ、焦点距離や画角や設置角などのカメラの特性に基づいて、車両位置を算出する。
(もっと読む)
地図表示システム、地図表示装置および地図表示方法
【課題】所望のタイミングで音声案内データに関連付けられた音声案内テキストデータを表示するようにした地図表示システムを提供する。
【解決手段】地図を表示手段に表示するとともに所定のタイミングで音声案内データを出力する地図表示システムにおいて、音声案内データに関連付けられ予め設定された言語または表記に基づいて作成された音声案内テキストデータを記憶するデータ保存メモリ250と、テキストデータ表示リンク抽出手段243と、テキストデータ表示調整手段245と、を備え、テキストデータ表示リンク抽出手段243は表示する地図データについて、表示領域内に存在する案内経路の道路リンクを抽出し、テキストデータ表示調整手段245は、抽出された案内経路の道路リンクの画像上またはその画像の近傍に、データ保存メモリから読み出された音声案内テキストデータを案内経路に沿って表示する。
(もっと読む)
測位装置
【課題】DR測位結果の補正を適切に実行する。
【解決手段】自律航法用のセンサと、各センサの計測値を算出するための所定の係数を保持する係数保持手段と、該所定の係数を用いて該計測値を算出する計測値算出手段と、計測値算出手段により算出された計測値を用いて測位演算を行う自律測位手段と、GPS航法により少なくとも該計測値に対応するパラメータの測位演算を行うGPS測位手段と、計測値算出手段により算出された計測値と、GPS測位手段により演算された、当該計測値に対応するパラメータの測位値との差を算出する差分算出手段と、差分算出手段により算出された測定値差と該所定の係数とを比較する比較手段と、比較手段による比較結果に基づいて自律測位手段の測位結果を補正する測位結果補正手段とを備えた測位装置を提供する。
(もっと読む)
携帯型情報端末及び携帯型情報端末の制御方法
【課題】出力された現在位置の信頼度を確認することができる携帯型情報端末を提供する
。
【解決手段】位置情報衛星から位置情報信号を受信して第1の現在位置を演算する第1の
現在位置演算部(ステップS42)と、移動距離及び移動方位を検出して第2の現在位置
を演算する第2の現在位置演算部(ステップS46)と、第1の現在位置演算部で第1の
現在位置を演算可能であるか否かを判断し、演算可能であるときに第1の現在位置演算部
を選択し、演算可能でないときに第2の現在位置演算部を選択する演算部選択手段(ステ
ップS43)と、該演算部選択手段で第2の現在位置演算部を選択したときに、第2の現
在位置の誤差推定量を演算する誤差推定量演算部(ステップS47〜S50)と、演算部
選択手段で第2の現在位置演算部を選択したときに、第2の現在位置と誤差推定量とを出
力する現在位置出力部(ステップS51,S46)とを備えている。
(もっと読む)
ナビゲーションシステム、およびGPS測位解精度判定方法
【課題】マルチパスやCWノイズ等の影響によるGPS測位解の精度低下を検知する。
【解決手段】複数のGPS衛星を捕捉・追尾し測位を行ってGPS測位解を取得するGPS測位解取得手段と、自律航法のための自律航法情報を出力する情報出力手段と、該出力された自律航法情報と該GPS測位解との比較結果に基づいて所定の参照値を算出する参照値算出手段と、該算出された所定の参照値と、該測位の過程で得られるクロック・オフセット値との差分を算出する差分算出手段とを具備し、該算出される差分に基づいて該GPS測位解の精度を判断するナビゲーションシステムを提供する。
(もっと読む)
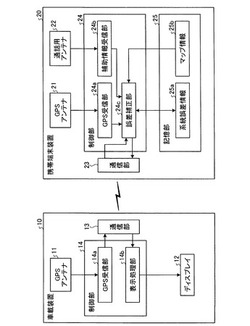
測位装置、携帯型電子機器及びプログラム
【課題】測位精度の向上を実現すること。
【解決手段】携帯型電話機1の近距離無線通信部50が、移動体である自動車2の近距離
無線通信部250との間で通信可能な状態にあることが検出されなかった場合は、携帯型
電話機1自身の移動状況の情報である端末移動状況情報及び複数のGPS信号に基づいて
現在位置の測位が行われる。一方、近距離無線通信部250との間で通信可能な状態にあ
ることが検出された場合は、自動車2の移動状況の情報である移動体移動状況情報が取得
され、移動体移動状況情報及び複数のGPS信号に基づいて現在位置の測位が行われる。
(もっと読む)
位置情報取得装置、位置情報取得方法、および、端末装置用プログラム
【課題】帯域内ノイズの影響を軽減して測位解の精度改善を実現する。
【解決手段】第一の条件を満たす信号をGPS信号として捕捉・追尾する信号捕捉追尾手段と、該捕捉・追尾された追尾信号を用いて測位を行い、該移動体の位置情報を算出する位置情報算出手段と、該算出された位置情報に基づいて該移動体が所定の場所に位置するか否かを判定する移動体位置判定手段と、移動体位置判定手段により該所定の場所に位置すると判定されるときに、GPS信号を捕捉・追尾するための条件を該第一の条件と異なる第二の条件に変更する捕捉追尾条件変更手段とを具備し、信号捕捉追尾手段が、移動体位置判定手段により該所定の場所に位置すると判定されている期間中、該第二の条件に基づいて信号捕捉・追尾を行う位置情報取得装置を提供する。
(もっと読む)
81 - 100 / 142
[ Back to top ]