
Fターム[2F129BB63]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 衛星による測位不良時 (525) | 受信不可 (254)
Fターム[2F129BB63]に分類される特許
21 - 40 / 254
ナビゲーション装置
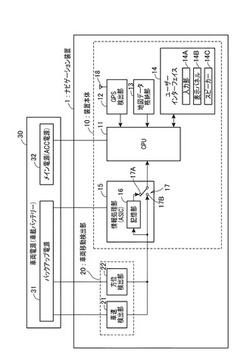
【課題】CPUの再起動後、より短い時間でルート誘導を開始することができるナビゲーション装置を提供することを目的とする。
【解決手段】車両電源30のメイン電源32にCPU11を接続するとともに、車両電源30のバックアップ電源31に情報処理部15及び車両移動検出部20を接続し、メイン電源32からの電源供給が中止されているCPU11の休止状態中は、車両移動検出部20からのデータを情報処理部15の記憶部16に記憶し、メイン電源32からの電源供給が再開された際に、記憶部16に記憶されたデータに基づいて車両の現在位置を算出することを特徴とする。
(もっと読む)
振動センサー式リアルタイムGPSロガーシステム

【課題】本願発明は、リアルタイムGPSシステムにおいて必要最小限且つ高密度のGPS位置情報をより確実に発信できることに関する。
【解決手段】本願発明に従ったリアルタイムGPSシステムは、従来システムが無線サービスエリアで発信間隔ごと一箇所の位置情報しか送信しないことに対し、GPSロガーに蓄積した複数ポイントの位置情報を一定の間隔で発信する。GPSロガーにある位置情報データは振動センサーにより、動いていない時には記録しないように制御する。本発明により、最短1秒間隔の位置情報データをリアルタイムで送信できるようになり、電波が届かない場所においても、位置情報を記録し続け、電波回復時再度送信が可能となる。また動いていない時には無駄な位置情報を無くすることにより、通信量及び電池消耗も減る。これにより、経済的に通信費が節約できる、利用できる時間も大幅に延長できる。
(もっと読む)
携帯端末装置、速度算出方法及び速度算出プログラム
【課題】GPS情報が取得できない区間で、適切な車両の速度を算出すること。
【解決手段】GPS情報に基づく速度を取得する取得部と、速度から求められる加速度と、加速度センサのデータとの相関係数、相関値を算出する第1算出部と、GPS情報が受信不可の区間において、相関係数及び相関値と加速度センサのデータとを用いて加速度を算出する第2算出部と、第2算出部により算出された加速度と、区間の前後で取得された速度とを用いて、区間内の速度を算出する第3算出部と、を備える。
(もっと読む)
経路比較装置、経路比較方法、及びプログラム
【課題】経路情報のデータ構造や格納方式が異なる場合であっても、経路同士を比較して一致度合いを算出することができる経路比較装置、経路比較方法、及びプログラムを提供する。
【解決手段】経路比較装置は、スタート地点及びゴール地点の位置情報を取得する地点情報取得部と、上記スタート地点及び上記ゴール地点間のリファレンス経路の形状データを取得するリファレンス経路取得部と、上記スタート地点及び上記ゴール地点間の経路を探索する経路探索部と、上記経路探索部により探索された探索経路の形状データと、上記リファレンス経路の形状データとを比較することにより上記経路間の一致度合いを示すマッチング度を算出するマッチング度算出部と、を有する。
(もっと読む)
経路探索装置、経路探索方法、及びプログラム
【課題】容易な操作で計測を開始したスタート地点まで戻る復路経路を探索することができる経路探索装置、経路探索方法、及びプログラムを提供する。
【解決手段】経路探索装置は、走行距離または走行時間を計測する計測部と、現在地の位置情報を取得する位置情報取得部と、上記計測部が計測を開始した時点において上記位置情報取得部により取得された上記位置情報をスタート地点の位置情報として登録するスタート地点登録部と、上記スタート地点に戻るための操作を検知すると、上記操作を検知した時点における上記現在地を出発地とし上記スタート地点を目的地とする復路経路を探索する経路探索部と、を有する。
(もっと読む)
腕装着型端末、ナビゲーションシステム、及び、プログラム
【課題】必要なナビゲーション情報を容易に取得可能な腕装着型端末、ナビゲーションシステム、及び、プログラムを提供する。
【解決手段】外部機器との間で無線通信によりデータの送受信を行う無線通信手段と、設定された期間に亘り、無線通信手段を用いて携帯型外部機器からナビゲーションデータを取得する制御手段と、制御手段からの制御信号に基づく表示を行う表示手段と、を備え、制御手段は、無線通信手段により携帯型外部機器から取得したナビゲーションデータに基づいて、簡易ナビゲーションデータを表示手段に表示させる。
(もっと読む)
案内情報出力装置
【課題】複数車線道路を走行時に、現在走行中の車線に応じて運転者に対する案内情報を適切に行う。
【解決手段】車両の現在位置を検出する現在位置検出手段と、車線情報を含む道路データを記憶した地図記憶手段と、目的地までの経路を探索する経路探索手段と、走行中の道路が複数車線を有した道路か否かを判定する道路種別判定手段と、道路種別判定手段により、走行中の道路が複数車線を有した道路であると判定された場合、車両が走行中の車線を判定する走行車線判定手段と、走行車線判定手段により判定された車線と現在位置前方にある分岐点における車両の進行方向とが対応していない場合、案内情報を出力する案内出力手段と、案内情報出力装置は、車両の挙動を検出する挙動検出手段を備え、経路探索手段は、挙動検出手段が、案内情報が出力されてからの車両の挙動を検出できない場合、分岐点で経路を逸脱して目的地に向かう経路探索を行う。
(もっと読む)
進行方位算出装置、進行方位算出方法及び進行方位算出プログラム並びにナビゲーション装置
【課題】進行方位を精度良く算出できるようにする。
【解決手段】本開示の進行方位算出装置は、使用者の歩行に伴い発生する加速度のうち、鉛直方向の加速度を表す鉛直加速度と、水平面内における加速度の方位及び大きさを表す水平加速度とを検出する検出部と、鉛直加速度のゼロクロス点を基に、使用者の2歩に相当する期間を歩行周期として設定する歩行周期設定部と、歩行周期内において、水平加速度の大きさが極小となる位相を基に、使用者の進行方向への加速と減速とが切り替わる加減速切替位相を設定する加減速切替位相設定部と、加減速切替位相毎に区切られた各区間を交互に加速区間又は減速区間として推定する加減速区間推定部と、減速区間では水平加速度が表す方位に基づき、加速区間では水平加速度が表す方位と反対の方位に基づき、使用者の進行方位を決定する進行方位決定部とを設けるようにした。
(もっと読む)
表示制御装置及び表示制御方法
【課題】探索した経路が、施設を通過する場合、施設内の経路を表示できる縮尺を特定し、特定した縮尺に基づいて経路を表示する。
【解決手段】地図情報を参照して探索された目的地までの経路が施設内を通過する場合に、前記経路上の前記施設へ進入する地点から前記経路上の前記施設から退出する地点までの経路を表示させる制御部を備えた表示制御装置であって、前記制御部は、前記進入する地点から前記退出する地点までの経路の経路データ、表示方向、及び、前記進入する地点から前記退出する地点までの経路を表示させる表示領域の大きさに基づいて前記進入する地点から前記退出する地点までの経路を表示させる際の縮尺を特定し、前記特定した縮尺に基づいて、前記進入する地点から前記退出する地点までの経路を表示させることを特徴とする。
(もっと読む)
ナビゲーション装置
【課題】推奨経路上の基準地点からユーザの歩数及び所定の歩幅を基に測定した歩行距離を推奨経路上の移動距離とし、推奨経路上のユーザの位置を推定するナビゲーション装置において、エスカレータや動く歩道やエレベータを通過することで発生する推定位置と実際の位置との間のずれを補正する。
【解決手段】ナビゲーション装置は、探索した推奨経路の経路案内を行う際、推奨経路上の基準地点からユーザの歩数及び所定の歩幅を基に測定した歩行距離を推奨経路上の移動距離とし、推奨経路上のユーザの位置を推定する。推奨経路上の推定位置がエスカレータ又は動く歩道又はエレベータに到達し(S41:Yes)、歩数計のカウントが一定時間停止したとき(S42:Yes)、推定位置をエスカレータ又は動く歩道又はエレベータの終点に設定する。
(もっと読む)
ナビゲーション装置
【課題】推奨経路上の基準地点からユーザの歩数及び所定の歩幅を基に測定した歩行距離を推奨経路上の移動距離とし、推奨経路上のユーザの位置を推定するナビゲーション装置において、推奨経路上の施設を通過することにより発生する歩行距離と実際の移動距離との間のずれを補正する。
【解決手段】ナビゲーション装置は、探索した推奨経路の経路案内を行う際、推奨経路上の基準地点からユーザの歩数及び所定の歩幅を基に測定した歩行距離を推奨経路上の移動距離とし、推奨経路上のユーザの位置を推定する。推奨経路上の推定位置が階段に到達したとき(S41:Yes)、「階段の段数×80cm−階段の長さ」を基準地点からの移動距離から減算し(S42)、推定現在位置を更新する(S43)。
(もっと読む)
運転支援装置、運転支援方法及びコンピュータプログラム
【課題】車両が逆走状態にあると誤検出されることを防止した運転支援装置、運転支援方法及びコンピュータプログラムを提供する。
【解決手段】GPS21や車速センサ22等の各種センサを用いて車両の現在位置と方位を検出し、車両の走行する道路に規定された走行方向である規定走行方向を取得し、車速パルスを所定間隔で取得している状態においては、検出された車両の現在の方位と規定走行方向とに基づいて、車両が逆走状態にあるか否かを検出するとともに、車速パルスを取得できない状態においては、検出された車両の現在の方位に基づいて、車両が逆走状態にあるか否かを検出しないように構成する。
(もっと読む)
ナビゲーション端末
【課題】特別なインフラ設備を必要とすることなく、位置が確定されている1台のナビゲーション端末とのやり取りのみで位置を確定することができるナビゲーション端末を提供する。
【解決手段】通信可能な他端末から送信された、該他端末の位置情報を含む無線波を受信する無線波受信部12と、無線波受信部12で受信された無線波に含まれる他端末の位置情報、及び他端末からの距離を示す距離情報に基づいて自端末の位置を算出する位置算出部15とを備える。これにより、特別なインフラ設備を必要とすることなく、ナビゲーション端末間のやり取りのみで位置を確定することが可能となる。
(もっと読む)
位置測定システム、位置測定装置および位置測定プログラム
【課題】受信可能なTDOA測定が4つよりも少ない状態において、十分に良好な位置推定ができる位置測定システム、位置測定装置および位置測定プログラムを提供する。
【解決手段】3つ以上のランドマーク装置と、前記ランドマーク装置から送信される情報であって該ランドマーク装置の位置を示す位置情報を有する信号を受信する移動端末とを有する位置測定システムであって、前記移動端末は、該移動端末に内蔵されたセンサであって、該移動端末の移動運動を検出するセンサと、前記3つ以上のランドマーク装置のそれぞれから受信した前記位置情報と、前記センサの検出値とに基づいて、該移動端末の位置を算出する位置推定手段とを有する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 予め決められた地点へ移動したり、予め決められた地点を通過したりする場合に、この地点の正確な位置データを測位結果に反映できる測位装置、測位方法およびそのプログラムを提供する。
【解決手段】 測位衛星を利用した間欠的な絶対位置の測定とモーションセンサによる連続的な相対変位の測定とに基づいて現在の推定位置を算出する位置算出手段(S2〜S6)と、地点登録手段と、位置算出手段により算出された推定位置が登録地点から所定範囲内にあるか否かを判定する位置範囲判定手段(S14)と、登録地点に到達した可能性のある所定状態の判別を行う到達状態判別手段(S15)と、位置範囲判定手段により前記所定範囲内と判定され、且つ、到達状態判別手段により前記所定状態であると判別された場合に、登録地点を現在の絶対位置に決定する現在位置決定手段(S16)とを備えている。
(もっと読む)
位置情報取得システム及びプログラム
【課題】車両の正確な位置情報を提供することが可能な位置情報取得システム及びプログラムを提供する。
【解決手段】車両用警報装置10には、車両のシガーソケットに接続されたシガープラグコードを接続するためのDCジャック21が設けられている。前記シガープラグコードをDCジャック21に接続することにより、車両用警報装置10は車両から電源供給を受けて動作を行うことができる。車両には、直流の電源とこれを充電するオルタネータが設けられており、走行時における電源からの電圧には、オルタネータノイズが重畳される。制御部は、オルタネータノイズを検出するノイズ検出部を備えており、車両から電源供給を受けて動作を行う場合、オルタネータノイズから車両のエンジン回転数を導出する。そして、GPS測位不可能となった場合には、エンジン回転数に基づいて車両の速度を導出し、車両の位置情報を表示する。
(もっと読む)
マルチセンサデータの収集/処理
【課題】加速度、角速度、磁界センサ等のマルチプルセンサからのセンサデータを収集し、および/または処理する。
【解決手段】プロセサ120と、プロセサに接続される1以上のセンサ130、140と、プロセサに接続され、外部センサからの計測情報を受信する無線インターフェースユニット110を備え、プロセサは計測情報に基づいて1以上のナビゲーション状態を評価することに用いられるマルチセンサ計測処理ユニット100。
(もっと読む)
マルチセンサデータの収集/処理
【課題】加速度、角速度、磁界センサ等のマルチプルセンサからのセンサデータを収集し、および/または処理する。
【解決手段】マルチセンサ計測処理ユニット300が付随する加速度計340と、マルチセンサ計測処理ユニット300に接続される外部の幾何学センサ370を備え、マルチセンサ計測処理ユニット300が、加速度計340および幾何学センサ370からのセンサデータに基づいて動きを検出し、加速度計340からの横揺れおよび縦揺れのセンサデータに基づいて幾何学センサ370の傾きを補償する。
(もっと読む)
地図表示制御装置、地図表示制御方法、およびプログラム
【課題】スクロール速度により地図上の地点間の勾配を示す。
【解決手段】地図表示制御装置10は、地図の表示範囲をスクロール移動する前の表示範囲内の地点である第1の基準地点の位置情報、及びスクロール移動先の上記地図の表示範囲の基準となる第2の基準地点の位置情報を取得する基準地点取得部151と、上記第1の基準地点と上記第2の基準地点との間の標高差を取得する標高差取得部152と、上記第1の基準地点と上記第2の基準地点との間の距離、及び上記標高差に基づいて、上記第1の基準地点と上記第2の基準地点との間の勾配を算出する勾配算出部153と、上記勾配に基づいて、上記スクロール移動の速度を決定する速度決定部154と、上記速度決定部により決定された速度で上記地図の表示範囲がスクロール移動するように上記地図の表示を制御する表示制御部158と、を有する。
(もっと読む)
車両用推定航法装置、車両用推定航法及び車両用推定航法のプログラム
【課題】マルチパスなど外乱の影響が少なく精度を向上することができる車両用推定航法装置を提供する。
【解決手段】車両に搭載され、GPS情報から速度ベクトルを算出する速度ベクトル算出手段と、タイヤの回転情報を検出するタイヤ回転情報検出手段と、タイヤの回転速度を算出するタイヤ回転速度算出手段と、ヨーレートを算出するヨーレート算出手段と、車両速度とタイヤ回転速度との関係式のパラメータを逐次推定アルゴリズムを用いて算出するパラメータ算出手段と、パラメータとタイヤ回転速度とから車両速度を逆推定する車両速度推定手段と、逆推定された車両速度と速度算出手段により算出された車両速度との差に基づく判定値と、所定の閾値とを比較する比較手段と、判定値が閾値より小さい場合、GPS情報とタイヤ回転速度とを用いて、車両速度とタイヤ回転速度との第1パラメータを逐次最小二乗法により算出する第1パラメータ算出手段とを備えている。
(もっと読む)
21 - 40 / 254
[ Back to top ]