
Fターム[2F129BB64]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 衛星による測位不良時 (525) | マルチパス (129)
Fターム[2F129BB64]に分類される特許
1 - 20 / 129
密結合GPSおよび推測航法車両航法用のロードマップ・フィードバック・サーバ
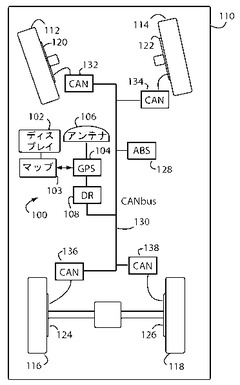
【課題】車両における全地球測位システム受信機および推測航法の密結合の組合せを無線ネットワーク・サーバによって行い、実用的なロードマップ補正フィードバックを実現する。
【解決手段】ロードマップ・フィードバックは、車両レンジおよび方向を演算するために、車両のCANbusネットワーク上の車輪速度トランスデューサのデータを収集する密結合GPSおよび推測航法システムにおいて使用される。ネットワーク・サーバによって提供される道路セグメント情報は、補正可能なフィードバックを導出することができるように、現在の航法解にテンプレートされた制約をデータベースに提供する。推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解のギャップを埋める。ロードマップの適合は、長い推測航法単独の動作の期間に蓄積されるドリフトを制御する。
(もっと読む)
走行軌跡記憶装置

【課題】車両の絶対軌跡をより正確に生成する。
【解決手段】カーナビゲーション装置10は、修正測位軌跡生成処理部26によって、測位軌跡生成処理部22が生成した測位軌跡を修正した修正測位軌跡を生成し、修正推測航法軌跡生成処理部27によって、推測航法軌跡生成処理部25が生成した推測航法軌跡を修正した修正推測航法軌跡を生成し、絶対軌跡生成処理部28によって、修正測位軌跡生成処理部26が生成した修正測位軌跡と修正推測航法軌跡生成処理部27が生成した修正推測航法軌跡とを合成した絶対軌跡を生成し、この絶対軌跡を記憶する。
(もっと読む)
位置検出システム、端末装置及び位置検出プログラム
【課題】付近にある他の端末装置等で検出した位置を用いて位置検出を行うことができ、位置検出の確度を向上させることができる位置検出システム等を提供すること。
【解決手段】リクエスト側のユーザ端末装置10の情報送受信部41は、近くのユーザ端末装置10に対して、位置情報とGPSの電波強度の送信を求める。他のユーザ端末装置10の情報送受信部41は、各々のGPS受信部16からの位置情報と電波強度を、送信を求めたユーザ端末装置10宛に送信する。これを受信したユーザ端末装置10の座標算出部45は、受信した位置情報と電波強度及び近距離通信電波強度検知部42が検知した近距離無線通信の電波強度等に応じて、当該ユーザ端末装置10の位置を算出する。
(もっと読む)
速度検出装置及び方法
【課題】移動体の速度を自律航法手段により高精度に検出することのできる速度検出装置及び方法を提供する。
【解決手段】移動体が移動する道路の道路属性を特定する道路属性特定手段100、110、180と、前記移動体の移動速度を検出するための異なる複数の自律航法手段100、112、113と、複数の前記自律航法手段100、112、113から、特定された前記道路属性に適合する前記自律航法手段100、112、113を選択する自律航法手段選択手段100と、を備え、選択された前記自律航法手段100、112、113を用いて、前記移動体の移動速度を検出する。
(もっと読む)
異常値判定装置、測位装置、及びプログラム
【課題】GPS情報とINS情報とを統合して測位を行う場合に、GPS情報の異常値を精度良く判定する。
【解決手段】区間幅決定部22で、速度情報の累積誤差と擬似距離誤差との差が所定範囲の値となるように、INS情報とGPS情報とを統合する区間幅を決定する。区間幅内の各時刻で観測された速度情報及び擬似距離を、N点観測値記憶部24に記憶する。初期値設定部26で、N点観測値記憶部24に記憶されたINS情報に基づいて方位角及び移動ベクトルの初期値を設定し、最適解推定部28で、観測値(ρ,Δx)から推定初期値からの変位で表される状態(dx,Cb,dθ)を推定する方程式を立て、最小二乗法により推定初期値を更新しながら収束するまで繰り返して状態を推定し、収束したときの状態及び推定初期値から測位解を推定する。異常値判定部30は、測位解と擬似距離から得られる位置との残差γが閾値を超える擬似距離を異常値と判定する。
(もっと読む)
相対位置推定装置及びプログラム
【課題】少ないデータ通信量で、他の装置との相対位置を精度良く推定することができるようにする。
【解決手段】位置・速度ベクトル算出部24によって自車両の位置及び速度ベクトルを算出する。無線通信部18によって、相手車両の位置及び速度ベクトルを受信する。位置差分相対位置算出部26によって、受信された相手車両の位置から、各時刻について相手車両の相対位置を算出する。軌跡算出部32によって、自車両の速度ベクトルを積算して軌跡を算出する。相手軌跡算出部34によって、受信された速度ベクトルを積算して相手車両の軌跡を算出する。軌跡利用相対位置推定部36によって、自車両の軌跡と、相手車両の軌跡と、各時刻について算出された相対位置とに基づいて、相手車両の軌跡の最適値を推定し、軌跡上の特定点における相対位置を推定する。
(もっと読む)
移動体測位装置
【課題】マルチパスの影響を低減し、位置精度を向上させることができる移動体測位装置を提供する。
【解決手段】画像処理部30において、カメラ20で取得した画像から抽出した建築物5の第1位置及び第2位置における所定の水平の基準線から建築物5の最上部までの画像上の仰角θ1、θ2を算出する。そして、測位演算制御部50において、第1位置と第2位置間の距離及び第1位置及び第2位置における建築物5の画像上の仰角θ1、θ2から建築物5の実際の高さHを算出する。算出した建築物5の実際の高さHと第2位置において、GNSS受信機10で取得したGNSS衛星の位置情報とに基づき、建築物5が、GNSS衛星からの電波を受信する際に障害になるか否かを判定し、障害になると判定した場合には、当該GNSS衛星から受信している電波をマルチパスと判定して、受信した電波の情報を用いないで測位演算を行う。
(もっと読む)
車両用推定航法装置、車両用推定航法及び車両用推定航法のプログラム
【課題】マルチパスなど外乱の影響が少なく精度を向上することができる車両用推定航法装置を提供する。
【解決手段】車両に搭載され、GPS情報から速度ベクトルを算出する速度ベクトル算出手段と、タイヤの回転情報を検出するタイヤ回転情報検出手段と、タイヤの回転速度を算出するタイヤ回転速度算出手段と、ヨーレートを算出するヨーレート算出手段と、車両速度とタイヤ回転速度との関係式のパラメータを逐次推定アルゴリズムを用いて算出するパラメータ算出手段と、パラメータとタイヤ回転速度とから車両速度を逆推定する車両速度推定手段と、逆推定された車両速度と速度算出手段により算出された車両速度との差に基づく判定値と、所定の閾値とを比較する比較手段と、判定値が閾値より小さい場合、GPS情報とタイヤ回転速度とを用いて、車両速度とタイヤ回転速度との第1パラメータを逐次最小二乗法により算出する第1パラメータ算出手段とを備えている。
(もっと読む)
測位装置、及び測位方法
【課題】様々な場所でできるだけ正確な位置を測位できるようにする。
【解決手段】
航法衛星システムの複数の衛星から送信された衛星信号を受信して現在位置を示す位置情報を演算するものであって、高感度と低感度の衛星信号受信機能を有し、高感度の衛星信号受信機能を使って演算された高感度での位置情報と、低感度の衛星信号受信機能を使って演算された低感度での位置情報とを、選択的に又は並行的に出力する航法衛星センサと、航法衛星センサから前記高感度での位置情報と低感度での位置情報とを選択的に又は並行的に取得して、高感度での位置情報と低感度での位置情報のいずれか一方を、移動体の現在位置を示す現在位置情報として選択する測位制御装置と、を備える測位装置。
(もっと読む)
測位精度判定装置
【課題】GPS測位の位置誤差の大小が判定できる測位精度判定装置を提供する。
【解決手段】速度センサ2による速度センサ由来速度と衛星測位速度演算部6による衛星測位速度とドップラー速度演算部7によるドップラー速度と加速度センサ由来速度演算部8による加速度センサ由来速度についてそれぞれ移動距離を演算する移動距離演算部9と、衛星測位速度から得た移動距離と他の移動距離とのの差を演算し、差が閾値より大のとき、GPS測位精度が低下していると判定する精度判定部10とを備える。
(もっと読む)
測位装置、測位方法、プログラム及び撮像装置
【課題】測位手段による測位の不安定な状態における位置情報の精度の向上を図る。
【解決手段】CPU10は、撮影位置において自律航法測位による継続的計測及びGPS測位による所定タイミング毎の測定を開始する。そして、CPU10は、GPS測位によって得られた少なくとも2以上の位置データに基づいて算出される移動ベクトルと、自律航法測位によりGPS測位によって得られた位置データとそれぞれ同時期に得られた2以上の地点における移動ベクトルとの差が所定範囲以内である場合に、少なくとも2以上の位置データのうちの何れかに基づいて位置情報取得地点を定める。そして、CPU10は、位置情報取得地点における位置データと自律航法測位により継続的に計測されてきた位置データとに基づいて撮影位置の位置データを求める。
(もっと読む)
画像表示装置およびナビゲーション装置
【課題】簡易な構成で、撮像した画像から移動体の進行方向の画像を抽出して表示することのできる画像表示装置およびナビゲーション装置を提供する。
【解決手段】移動体に備えられ、前記移動体の進行方向の画像を含む画像を撮像する撮像手段と、撮像された前記画像内の前記進行方向をあらわす基準位置を特定する基準位置特定手段と、撮像された前記画像から、前記基準位置を基準とする所定範囲の画像を抽出する画像抽出手段と、抽出された前記画像を表示する画像表示手段と、を備えることを特徴とする。
(もっと読む)
位置測定装置、および位置測定方法
【課題】移動体の絶対位置を簡単に精度高く取得できなかった。
【解決手段】移動体の最新の位置情報を格納しており、移動速度と移動方向を含む移動情報を取得する移動情報取得部と、位置情報と移動情報とを用いて移動体の予測位置情報を取得する予測位置情報取得部と、2以上の衛星からGPS信号を受信するGPS信号受信部と、2以上の衛星ごとにGPS信号を用いて、移動体と各衛星との擬似距離を取得する擬似距離取得部と、2以上の各衛星の擬似距離を用いて新位置情報を算出する新位置情報算出部と、新位置情報と予測位置情報との距離を算出する距離算出部と、距離が第一閾値を超えないか否かを判断する判断部と、第一閾値を超えない場合に新位置情報を最新の位置情報として書き込む位置情報更新部と、各部の処理を繰り返えさせる制御部とを具備する位置測定装置により、絶対位置を簡易な構成で精度高く取得できる。
(もっと読む)
加速度データ補正装置、及び、ナビゲーション装置
【課題】加速度センサとスピーカとが同一の筐体に内蔵されている装置において、加速度センサ出力からスピーカの振動の影響を除去すること。
【解決手段】筐体100に内蔵スピーカ132と加速度センサ124とが備え付けられた電子装置(カーナビゲーション装置)10は内蔵スピーカ132の振動が加速度センサ124の出力に及ぼす影響を除去する加速度データ補正部140を備え、加速度データ補正部140は、制御手段110と、内蔵スピーカ132に供給される音声信号をフーリエ変換する音声信号処理部141と、加速度センサ124の出力をフーリエ変換する加速度信号処理部142と、内蔵スピーカ132から音声信号が出力される場合に、ともにフーリエ変換された加速度センサの出力から音声信号の影響分を減じた後に逆フーリエ変換を行う信号合成部143と、を備える。
(もっと読む)
坂道検出装置、坂道検出方法、及び現在位置表示装置
【課題】移動体の走行路が坂道であるか否かを迅速且つ正確に検出することのできる坂道検出装置及び検出方法を提供する。
【解決手段】移動体の走行路が坂道であるか否かを検出する坂道検出装置において、気圧を検出する気圧検出手段12と、角速度又は加速度を検出する角速度/加速度検出手段13、14と、前記気圧検出手段12により検出した前記気圧と、前記角速度/加速度検出手段13、14により検出した前記角速度又は前記加速度とに基づき、前記移動体の前記走行路が坂道であるか否かを判定する坂道判定手段19と、を備える。
(もっと読む)
現在位置表示装置
【課題】GPS衛星信号に基づいて現在位置を算出するのに必要な演算時間と、現在位置表示装置の加減速状態とを考慮して、現在位置をより適正な位置に表示する。
【解決手段】過去の複数のGPS測位位置における現在位置表示装置の速度変化率を取得する速度変化率取得手段と、過去の複数のGPS測位位置に対する各重み付け係数を記憶する重み付け係数記憶手段と、過去の複数の速度変化率と対応する各重み付け係数とに基づき、最新の前記GPS測位位置における現在位置表示装置の速度変化率を予測速度変化率として算出する予測速度変化率算出手段と、最新のGPS測位位置と予測速度変化率とに基づき、GPS受信機によるGPS測位位置の出力時における現在位置表示装置の位置を推定位置として算出し、地図上の前記推定位置に現在位置マークを表示させる表示制御手段と、を備える。
(もっと読む)
ナビゲーション信号送信装置、ナビゲーション信号送信方法および位置情報提供装置
【課題】屋内でマルチパスフェーディングの大きい環境においても精度を低下させることなく位置情報を提供する位置情報提供システムを提供する。
【解決手段】
位置情報提供装置100は、屋内送信機200から送信される、異なったPRNコードでスペクトラム拡散符号化され、送信アンテナTX−ANT1およびTX−ANT2から各々送信される測位信号を、受信アンテナRX−ANTにより受信する。位置情報提供装置100は、送信信号のPRNコードをそれぞれ独立で非同期でサーチする。始めに一つ目のPRNコードが捕捉できた場合、その同期ループを用いて他チャネルにて他のPRNコードの捕捉を試みる。2つのチャネルで同期捕捉ができた場合は、一方のチャネルの信号を選択して、測位の処理が実施される。
(もっと読む)
現在位置表示装置、及び現在位置表示方法
【課題】ジャイロスコープの出力を用いて現在位置を精度良く地図上に表示すること。
【解決手段】現在位置検出手段と、地図データベースと、マップマッチング手段と、表示制御手段と、表示手段と、を備える現在位置表示装置は、さらに角速度の変化を検出する傾斜判定手段と、を備え、前記現在位置検出手段によって仮想現在位置を検出し、前記傾斜判定手段によって検出された角速度に基づいて前記傾斜判定手段が傾斜角度を算出し、前記傾斜角度に基づいて地図データベースを参照して前記仮想現在位置付近の前記候補となるリンクに対する信頼度を算出し、前記マップマッチング手段がより信頼度の高いリンク上にマッチング処理し、前記表示制御手段が前記マッチング処理された現在位置を地図画像と共に前記表示手段に表示する。
(もっと読む)
移動体用放送受信機
【課題】ノイズ抑制機能を効率的に発揮させることができる移動体用放送受信機を提供する。
【解決手段】放送信号を受信する受信回路部と、前記受信回路部が出力する出力信号に含まれるノイズ成分を抑制するノイズ抑制回路と、前記受信回路部が出力する出力信号に含まれるノイズ成分のノイズレベルを検出するノイズレベル検出部と、前記ノイズレベル検出部が検出したノイズレベルが閾値以上であるか否かに応じて前記ノイズ抑制回路を作動させるか否かを切替える切替部と、を備えた移動体用放送受信機において、受信環境に応じて前記閾値を可変に決定する閾値決定部を備える構成とする。
(もっと読む)
モータービークルに対する絶対位置を決定する方法
1 - 20 / 129
[ Back to top ]