
Fターム[2F129BB65]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 停止時 (68)
Fターム[2F129BB65]に分類される特許
1 - 20 / 68
測位方法決定装置及び測位方法決定方法
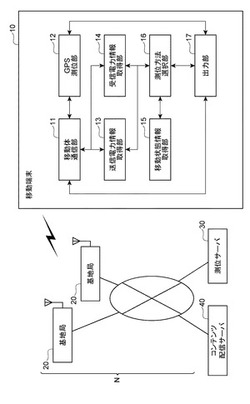
【課題】 移動端末の状況に応じて適切な測位精度及び消費電力となるように測位方法を選択する。
【解決手段】 移動端末10は、移動体通信機能とGPS測位に用いられる信号の受信機能とを有すると共に自端末10の測位方法を決定する測位方法決定装置であって、自端末10が移動体通信機能によって受信した基地局からの電波の基地局送信電力を示す情報を取得する送信電力情報取得部13と、基地局送信電力を示す情報に基づいて測位方法を選択する測位方法選択部16と、選択された測位方法を示す情報を出力する出力部17とを備える。
(もっと読む)
加速度センサのゼロ点検出装置、ゼロ点検出方法、および、プログラム

【課題】加速度センサに作用する加速度がゼロとなった状態の感応軸毎の検出値を精度よく求めることを可能にする。
【解決手段】加速度検出装置は、車両が停止状態であると判定されたとき、加速度センサ111で検出された感応軸毎の検出値と、加速度センサ111の感応軸毎のゼロ点との、感応軸毎の差分から構成される合成ベクトルの大きさが、重力加速度と等しくなることを利用した方程式を最小二乗法、或いは、逐次最小二乗法を用いて解法することで、加速度センサ111の感応軸毎のゼロ点を求める。このため、求めた検出値に誤差が含まれる余地を低減することができる。よって、加速度センサ111の感応軸毎のゼロ点を精度よく求めることができる。これにより、加速度検出装置は、加速度センサ111に作用する加速度も精度よく求めることができる。
(もっと読む)
ロード・マップ補正フィードバック補正付密結合GPSおよび推定車両航法
【課題】車両における全地球測位システム(GPS)および推測航法(DR)の密結合の組合せのためのロード・マップ補正フィードバックを提供する。
【解決手段】ロード・マップ補正フィードバック補正付密結合GPSおよび推定車両航法は、車両ネットワーク上の車輪速度トランスデューサのデータを収集し、車両レンジおよび針路を演算する。現在の航法解に合うような道路セグメントのデータベースは、DVDディスク内のロードマップで提供される。推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解におけるギャップを埋める。ロードマップフィッティング制御は、推測航法のみが長時間作動した際に蓄積されるドリフトを制御する。
(もっと読む)
ナビゲーション装置
【課題】CPUの再起動後、より短い時間でルート誘導を開始することができるナビゲーション装置を提供することを目的とする。
【解決手段】車両電源30のメイン電源32にCPU11を接続するとともに、車両電源30のバックアップ電源31に情報処理部15及び車両移動検出部20を接続し、メイン電源32からの電源供給が中止されているCPU11の休止状態中は、車両移動検出部20からのデータを情報処理部15の記憶部16に記憶し、メイン電源32からの電源供給が再開された際に、記憶部16に記憶されたデータに基づいて車両の現在位置を算出することを特徴とする。
(もっと読む)
車両用情報処理装置
【課題】 より多くの機会にターンテーブル付設駐車場を検出することができ、ターンテーブル付設駐車場の検出精度を高めることができる車両用情報処理装置を提供する。
【解決手段】 ナビゲーション装置11は、GPS信号に基づいて自車両の位置を表す自車両位置情報を検出する。また、自車両の走行履歴に基づいて、自車両の走行位置を表す自車両走行位置情報を検出する。さらに、走行開始位置から走行を開始した後における自車両の位置および自車両の走行位置が所定距離以上離れる場合に、ロケ補正発生イベントを実行する。駐車場判定部22は、ロケ補正発生イベント情報、ロケ補正後地点情報、前回駐車位置情報に基づいてターンテーブル付設駐車場を検出する。
(もっと読む)
ジャイロ用ゼロ点補正方法及び装置
【課題】ジャイロ出力のゼロ点補正値を停車時のジャイロ出力信号によって得る時、ターンテーブルに乗って回転しているときのジャイロの出力をゼロ点補正値としないようにジャイロ出力の閾値を設定する際に、高性能のジャイロを必要とせず、また車両停止時に方位マークが回転し続ける問題を解決する「ジャイロ用ゼロ点補正方法及び装置」とする。
【解決手段】車両の停止判定時に、ジャイロの出力によってそのゼロ点補正値を算出するとき、ジャイロの標準出力値の上下に、車両がターンテーブルに乗って回転している時のジャイロの出力以内の範囲に閾値を設定する。車両の停止判定時のジャイロの出力が、閾値の範囲外にあることを検出したときから継続して閾値を超えている経過時間を算出し、経過時間が1分等の所定時間を超えたとき、車両はターンテーブルに乗っていなかったと判定して、車両の停車判定開始時のゼロ点補正値を採用する。
(もっと読む)
加速度データ補正装置、及び、ナビゲーション装置
【課題】加速度センサとスピーカとが同一の筐体に内蔵されている装置において、加速度センサ出力からスピーカの振動の影響を除去すること。
【解決手段】筐体100に内蔵スピーカ132と加速度センサ124とが備え付けられた電子装置(カーナビゲーション装置)10は内蔵スピーカ132の振動が加速度センサ124の出力に及ぼす影響を除去する加速度データ補正部140を備え、加速度データ補正部140は、制御手段110と、内蔵スピーカ132に供給される音声信号をフーリエ変換する音声信号処理部141と、加速度センサ124の出力をフーリエ変換する加速度信号処理部142と、内蔵スピーカ132から音声信号が出力される場合に、ともにフーリエ変換された加速度センサの出力から音声信号の影響分を減じた後に逆フーリエ変換を行う信号合成部143と、を備える。
(もっと読む)
姿勢角安定化装置及び方法
【課題】高精度速度計測装置に組み込まれて、移動体の静止時における位置、速度及び方位の変化を解消すると共に、静止状態から動的状態に切り替わるときであっても、連続的な姿勢角及び速度応答出力を行うことができるようにする姿勢角安定化装置及び方法を提供すること。
【解決手段】姿勢角安定化装置100は、移動体の角速度とフィードバックした補正値とから姿勢角の変化量を算出し、算出した姿勢角の変化量を積分した姿勢角と、カルマンフィルタによって推定された姿勢角の推定値とから姿勢行列を生成し出力する。そして、動作時と判定した場合に生成した姿勢行列のラッチを行い、静止時と判定した場合に静止時であると判定する前の姿勢行列のラッチを保持し、ラッチしている姿勢行列と、生成した姿勢行列とから姿勢角誤差を算出し、算出した姿勢角誤差と生成した姿勢行列とに基づいて姿勢角を補正するための補正制御値を算出し、フィードバックする。
(もっと読む)
ナビゲーション装置
【課題】道路傾斜による影響を排除し取付角度を正確に求めることができるナビゲーション装置を提供することを目的とする。
【解決手段】車両に取付をした取付台に任意の角度で設置することができるナビゲーション装置1であって、互いに直交する3つの軸の各方向の加速度を検出する3軸加速度センサ4と、ナビゲーション装置1の取付角度を算出する制御部2とを備え、制御部2は、3軸加速度センサ4が車両走行中に検出した加速度の2つの軸についてそれぞれの方向の加速度である第1および第2加速度を取得し、この第1および第2加速度の絶対値の比率および加速度の極性により取付角度を算出する。
(もっと読む)
車載用電子機器
【課題】走行中におけるユーザの操作回数を低減させつつも、ユーザの所望する機能を動作させること。
【解決手段】階層化された複数のメニュー画面に含まれるメニュー画面を表示手段に表示し、表示した前記メニュー画面上に配列されたメニュー項目の選択を促す車載用電子機器において、前記メニュー項目には、少なくとも、対応付けられた下位の階層のメニュー画面を前記表示手段に表示するための階層項目と、前記車載用電子機器における機能を実行するための機能項目と、があり、前記車載用電子機器は、更に、車両が停車中か否かを判定する停車判定手段と、前記停車判定手段により停車中でないと判定された状態で、前記階層項目が選択された場合、該階層項目に対応付けられたメニュー画面を表示できなくする階層制限手段と、を備えることを特徴とする。
(もっと読む)
制御装置、プログラム及び制御方法
【課題】対象物の移送状況に応じて適切な省電力が可能となる制御装置等を提供する。
【解決手段】工作機械3に取り付けられた制御装置2は測位装置を制御する。制御装置2は速度及び振動情報を取得する。制御装置2は取得した速度が所定速度を超える場合に、第1状態と判断する。第1状態へ移行した場合、制御装置2は測位装置の測位周期を第1周期へ変更する。取得した速度が所定速度以下の場合には、第2状態と判断する。第2状態へ移行した場合、制御装置2は測位装置の測位周期を第1周期より短い第2周期へ変更する。第2状態へ移行した後、取得した速度が所定速度を超える場合、制御装置2は第1状態へ移行する。第2状態へ移行した後、取得した振動情報が予め記憶した振動パターンにマッチした場合、制御装置2は第3状態と判断する。
(もっと読む)
移動体搭載用機器
【課題】移動体への取り付け状態によらず、移動体の移動により移動体の或る軸回りに角速度が発生した場合に、その軸とは異なる軸回りの角速度を精度良く得ることが可能となる移動体搭載用機器を提供する。
【解決手段】重力加速度算出部181が出力する重力加速度と、車体加速度算出部182が出力する車体加速度とに基づき、ジャイロセンサ132のピッチ軸と車体の鉛直軸とのなす角度を算出する取り付け角度算出部183と、ジャイロセンサ132が検出するヨー軸回りの角速度と、取り付け角度算出部183が算出した角度とに基づき、ジャイロセンサ132が検出するピッチ軸回りの角速度に含まれる不要成分を算出し、ジャイロセンサ132が検出するピッチ軸回りの角速度から、算出された不要成分を減算する補正部133と、を備える構成とした。
(もっと読む)
車載用電子機器
【課題】スタンバイ状態の暗電流を低減して車両への実装を容易化できる自車方向補正機能を有する車載用電子機器を提供する。
【解決手段】自車方向を検出する機能を有し、回転角度検知部と自車方向補正部とを備えた車載用電子機器において、さらに振動検出部を備え、アクセサリ電源がオフになった後、前記回転角度検知部への電源供給がオフとされてスタンバイ状態となり、前記振動検出部が振動を検出せず前記アクセサリ電源がオフの間はスタンバイ状態が継続され、スタンバイ状態において前記振動検出部が振動を検出すると、前記回転角度検知部へ電源が供給されて前記回転角度検知部が起動し、前記回転角度検知部が回転角度を検知し、前記アクセサリ電源がオンになると、前記自車方向補正部は、前記検知された回転角度に基づき前記アクセサリ電源がオフになった際の自車方向を補正する構成とした。
(もっと読む)
ナビゲーション装置、動作制御方法及び携帯端末装置
【課題】電力消費を低減する。
【解決手段】PND1は、当該PND1に作用する地磁気値Mを検出する地磁気センサ8を設けると共に、当該PND1がクレードル3に装着されているか否かをクレードル検出部17により判定する。PND1がクレードル3に装着されている場合、動作制御部29は、地磁気センサ8、方位算出部28及び姿勢角検出部27を動作させる。一方PND1がクレードル3に装着されていない場合、動作制御部29は、地磁気センサ8、方位算出部28及び姿勢角検出部27の動作を停止させる。これによりPND1は、車両9から取り外された場合は地磁気センサ8を動作させると共に、正しい方位を表す地磁気値Mを検出することが困難である車両9に取り付けられた場合は地磁気センサ8の動作を停止させることができる。
(もっと読む)
車両用ナビゲーション装置
【課題】 車両のエンジンが始動した直後に走行を開始した場合であっても、出発地点を精度よく決定することができる車両用ナビゲーション装置を提供する。
【解決手段】 ECU1は、アクセサリスイッチがオンとなったときに始動地点データおよびアクセサリスイッチがオフとなったときに終了地点データを走行データ記憶部11で記憶する。また、車両が走行を終了してアクセサリスイッチをオフとした後、イグニッションスイッチをオンとして走行を開始する際、終了地点データに基づく位置を出発地点として決定する。
(もっと読む)
ナビゲーション装置
【課題】方位を変化させる施設に関する情報などを用いずに、方位を正しく算出する。
【解決手段】ナビゲーション装置1は、ナビゲーション処理等を行うメインシステム100と、車両の方位を算出するためのデータを算出するジャイロセンサモジュール200と、車両の振動を検知するショックセンサモジュール300を有する。また、ナビゲーション装置1は、メインシステム100およびジャイロセンサモジュール200に電源を供給する主電源制御スイッチ(主SW)420と、ジャイロセンサモジュール200に電源を供給する副電源制御スイッチ(副SW)430とを有する。ショックセンサモジュール300は、主電源制御スイッチ420がOFFの間に、車両の衝撃を検知すると、副電源制御スイッチ430をONにする。
(もっと読む)
角速度センサ補正装置、角速度算出装置、角速度センサ補正方法、角速度算出方法
【課題】起動してから短期間であっても角速度の導出精度を向上したい。
【解決手段】測定部10は、GPS衛星からの信号をもとに測位された対象物の測位データと、角速度センサ26から出力された対象物の角速度とを取得する。オフセット値演算部28は、測位データと角速度とをもとに、対象物の走行状態を推定する。オフセット値演算部28は、推定した対象物の走行状態に応じて、測位データと角速度との組合せを変更しながら、仮のオフセット値を逐次導出した後、仮のオフセット値に対して統計処理を実行することによって、オフセット値を導出する。感度係数演算部30は、測位データと角速度とをもとに、仮の感度係数を逐次導出した後、仮の感度係数に対して統計処理を実行することによって、感度係数を導出する。角速度変換部14は、感度係数、オフセット値、角速度とをもとに、最終的な角速度を導出する。
(もっと読む)
角速度センサ補正装置および角速度センサ補正方法
【課題】起動してから短期間であっても角速度の導出精度を向上したい。
【解決手段】GPS測位部20は、GPS衛星からの信号を受信して、対象物の方位が少なくとも含まれたGPS測位データ200を出力する。角速度センサ26は、対象物における角速度を出力する。オフセット値演算部28は、測位データと角速度とをもとに、対象物の走行状態を推定する。オフセット値演算部28は、推定した対象物の走行状態に応じて、角速度センサの仮のオフセット値を逐次導出する。オフセット値演算部28は、角速度センサの仮のオフセット値に対して統計処理を実行することによって、角速度センサのオフセット値を導出する。ここで、統計処理の際の忘却係数は、対象物の走行状態に応じて変更される。
(もっと読む)
自己較正型ジャイロスコープ・システム
【課題】ジャイロスコープ・システムにおいて、倍率誤差及びバイアス誤差を最少に抑える。
【解決手段】相互に非平行配列の検知軸130a〜130dを有する複数のジャイロスコープ110a〜110dを用いる。ジャイロスコープの数は、ナビゲーションに必要な軸の数よりも少なくとも1つ多い。プロセッサが、モード逆転技法を用いて、選択したジャイロスコープについてのバイアス誤差の推定値を得、ランダム閉ループ倍率技法を用いて、選択したジャイロスコープについて倍率誤差の推定値を得る。モード逆転技法では、各ジャイロスコープは較正のために一時的にオフラインとし、その後通常動作に戻す。少なくとも1つの冗長なジャイロスコープが設けられているので、選択したジャイロスコープがオフラインになっているとき、残りの動作中のジャイロスコープからの速度情報を用いれば、オフラインのジャイロスコープの軸を中心とする基準速度を導き出すことができる。
(もっと読む)
車載角速度検出装置
【課題】角速度をより適正に計測すること。
【解決手段】車両の鉛直軸に直交する第1の方向に振動子を励振振動させる励振振動手段と、車両の鉛直軸及び第1の方向に直交する第2の方向における振動子の変位を検出する変位検出手段と、変位検出手段により検出された変位に基づいて、車両の鉛直軸周りの角速度を算出する算出手段と、を備える車載角速度検出装置であって、車両を回動させるターンテーブルの角速度を、算出手段の算出結果に依らずに取得するターンテーブル角速度取得手段と、車両がターンテーブルにより回動しているときに算出手段により算出された角速度と、ターンテーブル角速度取得手段により取得されたターンテーブルの角速度との比較に基づいて、算出手段の算出傾向を修正する修正手段と、を備えることを特徴とする。
(もっと読む)
1 - 20 / 68
[ Back to top ]