
Fターム[2F129BB66]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 航行中 (529)
Fターム[2F129BB66]に分類される特許
61 - 80 / 529
車載用電子機器
【課題】走行中におけるユーザの操作回数を低減させつつも、ユーザの所望する機能を動作させること。
【解決手段】階層化された複数のメニュー画面に含まれるメニュー画面を表示手段に表示し、表示した前記メニュー画面上に配列されたメニュー項目の選択を促す車載用電子機器において、前記メニュー項目には、少なくとも、対応付けられた下位の階層のメニュー画面を前記表示手段に表示するための階層項目と、前記車載用電子機器における機能を実行するための機能項目と、があり、前記車載用電子機器は、更に、車両が停車中か否かを判定する停車判定手段と、前記停車判定手段により停車中でないと判定された状態で、前記階層項目が選択された場合、該階層項目に対応付けられたメニュー画面を表示できなくする階層制限手段と、を備えることを特徴とする。
(もっと読む)
自車両位置補正装置

【課題】交差点で自車両の位置補正を行う従来装置は、位置補正処理に適さない交差点でも実行するので位置補正に誤差が生じる。
【解決手段】自車両に搭載された撮像装置の映像から横断歩道検出手段で横断歩道を検出し、車両情報取得手段で自車両の現在位置と自車両方位を取得し、横断歩道検出手段と車両情報取得手段の情報から自車両の通過交差点の緯度経度を交差点位置算出手段で算出し、地図情報取得手段で地図情報記録手段から緯度経度情報と交差点の形成状態を示す交差点情報を取得し、自車両位置補正適正判定手段で、交差点位置算出手段と車両情報取得手段と地図情報取得手段からの情報により自車両位置情報の補正に適した交差点か否かを判定し、判定結果が自車両位置情報の補正に適した交差点と判定された時に自車両位置情報を補正する自車両位置情報補正手段を備える。
(もっと読む)
動態管理システムおよび動態管理方法
【課題】GPS信号が受信できない場合や、無線通信が行えない場合でも、車載端末の位置および到着予想時間を表示できる動態管理システムを提供する。
【解決手段】車載端末では、ジャイロ機能と車速パルスから算出する位置情報をGPSからの位置情報と比較し、キャリブレーションを行う。移動距離のズレの傾向を蓄積し補正値を作成し、GPS信号が受信できない時のジャイロ機能と車速パルスから算出する位置情報に補正値を加算する。動態管理サーバは、車載端末の位置情報に対するマップマッチングを行い、交通情報を基に車両の移動範囲を予測する。車載端末からの位置情報がGPS以外のデータが続いた場合、通過予定のPOI情報を車載端末へ送信する。車載端末の表示部に表示されたPOI情報に対応する施設を通過したらボタンを運転者に押させることで、動態管理サーバは車載端末の位置情報を取得し、予想到着時刻と誤差レベルを決定する。
(もっと読む)
ヨーレート補正装置、及びその方法
【課題】ヨーレートセンサによって検出されるヨーレートを補正することのできるヨーレート補正装置、及びその方法を提供する。
【解決手段】自車両の走行方向の画像を撮像する撮像手段と、画像における自車両の旋回時の消失点を第1の消失点として検出し、当該画像における自車両の直進時の消失点を第2の消失点として検出する消失点検出手段と、第1の消失点と第2の消失点との画像上の水平方向の間隔に基づき、自車両のヨーレートを推定ヨーレートとして推定する推定手段と、自車両のヨーレートを検出する検出手段と、推定ヨーレートに基づきヨーレートを補正した補正ヨーレートを算出する補正手段とを備える。
(もっと読む)
水中航走体の位置較正方法
【課題】 音響測位可能な領域が小さくても精度よく位置較正できるようにする。
【解決手段】 音響測位実施可能領域23に、円周状位置検出用経路24を設定する。水中航走体6を、自身で計測する慣性航法位置25に基づいて円周状位置検出用経路24に沿って航走させながら、支援船側より音響測位を行う。次いで、水中航走体6が最も東寄りに位置するときの音響測位位置26の経度成分の代表値27と、慣性航法位置25の経度成分の代表値29から経度方向に関する偏差δxを求め、水中航走体6が最も南寄りに位置するときの音響測位位置26の緯度成分の代表値28と、慣性航法位置25の緯度成分の代表値30から緯度方向の偏差δyを求める。その後、各偏差δx,δyにより水中航走体6が自身で測位する慣性航法位置25を較正させる。
(もっと読む)
現在位置特定装置およびプログラム
【課題】GPS受信機を位置検出のための他の装置と併用する環境において、GPS受信機の消費電力低減を実現する新規な技術を提供する。
【解決手段】車両用ナビゲーション装置は、自律航法用のための信号を出力するセンサから出力される信号の値と車両の現在位置との間の関係式を用いて、センサが出力された信号に応じた前記車両の現在位置を算出し、また、GPS受信部が出力した信号に基づいて、間欠的に、前記関係式を補正する。また、車両用ナビゲーション装置は、関係式を補正したことに起因して(ステップ130)、GPSアンテナおよびGPS受信部への電力供給を一時的に停止させ(ステップ145)、その後、復帰条件が満たされたことに起因して、停止している前記電力供給を再開させる。
(もっと読む)
歩幅推測方法、移動軌跡算出方法及び歩幅推測装置
【課題】歩幅をより正確に推測するための新たな手法を提案すること。
【解決手段】ナビゲーション装置1において、加速度センサー41の検出結果に対するフィルター処理が行われ、Z軸の加速度のピークが検出されることで、ユーザーの歩行が検出される。そして、フィルター処理されたZ軸の加速度を用いて、ユーザーの歩行速度に応じて予め定められた相関モデル式に従ってユーザーの歩幅が推測される。また、ジャイロセンサー43の検出結果に対してもフィルター処理が行われ、フィルター処理されたZ軸回りの角速度に対する積分処理が行われて、ユーザーの歩行方向が推測される。そして、推測された歩幅と歩行方向とを用いて、ユーザーの移動軌跡が算出される。
(もっと読む)
制御装置、プログラム及び制御方法
【課題】対象物の移送状況に応じて適切な省電力が可能となる制御装置等を提供する。
【解決手段】工作機械3に取り付けられた制御装置2は測位装置を制御する。制御装置2は速度及び振動情報を取得する。制御装置2は取得した速度が所定速度を超える場合に、第1状態と判断する。第1状態へ移行した場合、制御装置2は測位装置の測位周期を第1周期へ変更する。取得した速度が所定速度以下の場合には、第2状態と判断する。第2状態へ移行した場合、制御装置2は測位装置の測位周期を第1周期より短い第2周期へ変更する。第2状態へ移行した後、取得した速度が所定速度を超える場合、制御装置2は第1状態へ移行する。第2状態へ移行した後、取得した振動情報が予め記憶した振動パターンにマッチした場合、制御装置2は第3状態と判断する。
(もっと読む)
現在位置表示装置
【課題】GPS信号に基づく現在位置算出に要する時間だけ後の現在位置表示装置の推定位置を求め、この推定位置を現在位置として表示する。
【解決手段】現在位置表示装置1は、GPS衛星信号を受信し所定の演算時間後に現在位置表示装置1の位置をGPS測位位置として算出するGPS受信機11と、現在位置表示装置1の速度を検出する速度検出手段13と、GPS測位位置の履歴を記憶する測位位置記憶手段15と、前記速度検出手段13により検出された現在位置表示装置1の速度と、前記GPS測位位置とから、前記演算時間だけ後の現在位置表示装置1の位置を推定位置として算出する制御手段10と、前記推定位置に基づいて現在位置表示装置1の位置マークの表示位置を調整する表示制御手段19と、を備える。
(もっと読む)
測位装置、測位方法及びプログラム
【課題】測位手段による位置情報の精度の向上を図る。
【解決手段】CPU10は、GPS測位によって得られた少なくとも二以上の位置データに基づいて算出される移動ベクトルと、GPS測位によって得られた位置データとそれぞれ同時期に自律航法測位により得られた二以上の地点における移動ベクトルとをそれぞれ算出する。そして、CPU10は、算出された各移動ベクトルの差が所定範囲以内である場合には、GPS測位によって測定された位置データを移動履歴データ記憶部22に記憶するとともに、各移動ベクトルの差が所定範囲以内でない場合には、前回移動履歴データ記憶部22に記憶されたGPS測位によって測位された位置データを起点として自律航法測位による計測に基づいて算出された位置情報を移動履歴データ記憶部22に記憶する。
(もっと読む)
測位装置、測位方法、プログラム及び撮像装置
【課題】測位手段による測位の不安定な状態における位置情報の精度の向上を図る。
【解決手段】CPU10は、撮影位置において自律航法測位による継続的計測及びGPS測位による所定タイミング毎の測定を開始する。そして、CPU10は、GPS測位によって得られた少なくとも2以上の位置データに基づいて算出される移動ベクトルと、自律航法測位によりGPS測位によって得られた位置データとそれぞれ同時期に得られた2以上の地点における移動ベクトルとの差が所定範囲以内である場合に、少なくとも2以上の位置データのうちの何れかに基づいて位置情報取得地点を定める。そして、CPU10は、位置情報取得地点における位置データと自律航法測位により継続的に計測されてきた位置データとに基づいて撮影位置の位置データを求める。
(もっと読む)
衛星位置決め受信機および代理定位システム
ユーザ端末、特に移動体装置における電力消費を低減するため、衛星位置決め信号が使用不能な場合に地上波ビーコンを代替所在地として使用するシステムおよび方法を紹介する。衛星位置決め信号の導き出す所在地の代替としてビーコンを使用するのに際し、地上波ビーコンの地理的所在地は未知であってよい。 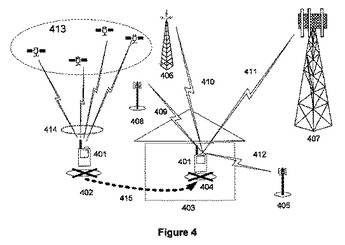 (もっと読む)
(もっと読む)
ナビゲーションシステムおよび車載装置
【課題】自車両の状態変化によって自車位置の予測精度が低下することを防止しつつ、車載装置によって表示される自車位置と実際の自車位置とのずれを低減すること。
【解決手段】車載装置の走行距離算出部が、自車両から出力される車速パルスと車速算出用係数とを用いて算出される自車速度に基づき、所定区間における第1の走行距離を算出し、携帯端末装置の走行距離算出部が、所定区間における自車両の第2の走行距離を測位衛星から提供されるGPS情報に基づき算出し、学習部が、第1の走行距離と第2の走行距離との比較結果に基づき、車速算出用係数を補正し、携帯端末装置の自車位置予測部が、車速パルスと補正された車速算出用係数とを用いて算出された自車速度に基づき、自車位置を予測するようにナビゲーションシステムを構成する。
(もっと読む)
移動体搭載用機器
【課題】移動体への取り付け状態によらず、移動体の移動により移動体の或る軸回りに角速度が発生した場合に、その軸とは異なる軸回りの角速度を精度良く得ることが可能となる移動体搭載用機器を提供する。
【解決手段】重力加速度算出部181が出力する重力加速度と、車体加速度算出部182が出力する車体加速度とに基づき、ジャイロセンサ132のピッチ軸と車体の鉛直軸とのなす角度を算出する取り付け角度算出部183と、ジャイロセンサ132が検出するヨー軸回りの角速度と、取り付け角度算出部183が算出した角度とに基づき、ジャイロセンサ132が検出するピッチ軸回りの角速度に含まれる不要成分を算出し、ジャイロセンサ132が検出するピッチ軸回りの角速度から、算出された不要成分を減算する補正部133と、を備える構成とした。
(もっと読む)
位置情報取得システム、位置情報取得装置、位置情報取得方法
【課題】機器に表示された地図をユーザが見ることなく、GPS装置によって取得された位置情報をユーザが補正することができる位置情報取得装置を提供する。
【解決手段】音声によって入力された情報を解析し、情報に含まれる目標物を特定する音声認識サーバ装置1と、特定された前記目標物に基づいて、移動通信装置によって測位された測位情報を補正する位置補正サーバ装置202とを含む位置情報取得装置を構成する。そして、位置補正サーバ装置202に、測位情報に関する誤差に基づいてユーザが存在し得る特定範囲を特定する誤差判定部301、ユーザ存在範囲特定部302と、特定範囲のうち、目標物が視認可能な範囲と重複する視認可能エリアを特定し、測位情報が示す移動通信装置の現在位置を、視認可能エリアの重心を含む範囲に補正するユーザ位置補正処理部303とを設ける。
(もっと読む)
相対位置算出装置
【課題】自車両の他車両に対する相対位置を高精度に算出する。
【解決手段】相対位置算出装置100は、自車両の測位位置を取得する測位位置取得手段110と、他車両が取得する他車両の測位位置を他車両から受信する他車両位置受信手段122と、他車両が他車両の測位位置を取得するために利用する測位衛星を示す他車両測位利用衛星情報を他車両から受信する他車両衛星情報受信手段123と、測位位置取得手段が自車両の測位位置を取得するために利用する自車両測位利用衛星と他車両測位利用衛星とが互いに異なる場合には、測位利用衛星を一致するように変更する測位利用衛星変更手段124と、変更された自車両測位利用衛星を利用して測位位置取得手段によって取得された自車両の測位位置と他車両位置受信手段によって受信された他車両の測位位置とに基づいて、自車両の他車両に対する相対位置を算出する相対位置算出手段125とを備える。
(もっと読む)
車載用ナビゲーション装置及びナビゲーション方法
【課題】必要最小限の情報に基づき、高架道路とそれに並走する高架下道路のいずれを走行中であるのかを正確に判定することのできる車載用ナビゲーション装置及びナビゲーション方法を提供する。
【解決手段】高架道路とそれに並走する高架下道路のいずれか一方を車両が走行する際、衛星電波受信手段14により受信したアルマナックデータに基づき、衛星電波を受信可能な人工衛星を判別するとともにその位置情報を取得し、走行方向検出手段17により検出した車両の走行方向に対して、車両の走行方向の一方の側にある衛星電波を受信可能な人工衛星からの衛星電波の受信レベルが所定レベル以下であれば、高架下道路を走行しているものと判定し、所定レベルよりも大きいときには、高架道路を走行しているものと判定する。
(もっと読む)
ナビゲーションシステム間の時間関係情報を推定するための方法および装置
少なくとも1つの推定時間関係パラメータを使用する位置/速度推定プロセスを採用することによって、ファーストタイムツーフィックスをできるだけ低減するために、および/または場合によっては、デバイスのパフォーマンスまたは効率を高めるために様々な電子デバイス中に実装され得る方法および装置を提供する。 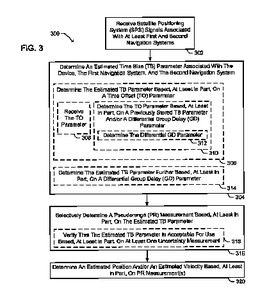 (もっと読む)
(もっと読む)
GPSレシーバ及びナビゲーションシステム
【課題】GPS測位演算において測位が中断された直後の測位精度を高めること。
【解決手段】カルマンフィルタを用いたGPS測位演算を所定の周期で行うことにより自車の推定位置を算出し、デッドレコニング用のセンサの出力に基づいて自車の移動位置を算出する測位演算部を備える車載用のGPSレシーバであって、測位演算部は、非測位状態において推定位置と移動位置との距離が所定の距離よりも大きいと判定した場合に、該カルマンフィルタのフィルタリセットを実行することを特徴とするGPSレシーバ及び該GPSレシーバを備えるナビゲーションシステムを提供する。
(もっと読む)
測位システム
【課題】GNSSにより測位される位置の誤差を推定することができる測位システムを提供すること。
【解決手段】衛星から受信した電波の到達時間から車両と衛星間の観測距離を計算する観測距離計算手段と、衛星から受信した位置情報に基づき所定時間の衛星の移動量ベクトルを推定する衛星移動ベクトル推定手段と、車両が走行しているリンクの勾配を推定する勾配推定手段と、車両の移動方向と前記勾配から、所定時間の車両の移動量ベクトルを推定する車両移動ベクトル推定手段と、衛星の移動量ベクトルと車両の移動量ベクトルとを比較して、衛星と車両間の推定距離の変化量を推定する距離変化量推定手段と、所定時間の観測距離の変化量を求め、推定距離の変化量と比較して衛星から受信する電波の信頼度を推定する信頼度推定手段と、信頼度に応じて衛星から受信した電波を処理し、車両の位置を推定する測位手段と、を有することを特徴とする測位システムを提供する。
(もっと読む)
61 - 80 / 529
[ Back to top ]