
Fターム[2F129BB66]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 航行中 (529)
Fターム[2F129BB66]に分類される特許
101 - 120 / 529
地図データ更新装置、及び地図データ更新方法、及びプログラム
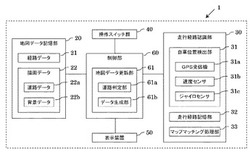
【課題】車両の走行した経路に対して、新規道路として地図データに更新するか否かを一意的に判定することなく、種々の状況を加味して、精度よく判定することが可能な地図データ更新装置、地図データ更新方法、及びプログラムを提供すること。
【解決手段】道路判定部61aは、車両の走行軌跡が、更新すべき道路であるか否かを判定する。具体的には、マップマッチングが不可能となった走行経路(道路可能性経路)が更新すべき道路であるか否かを判定する。その際、道路可能性経路が走行した背景データ22bの種類、道路データ、走行状況等に応じて設定された正負のコストの総和値が0より大きい場合に更新すべき道路と判定する。
(もっと読む)
ナビゲーション装置及び施設表示方法

【目的】駐車した駐車場と提携している施設(店)を表示する機能を備えた「車載ナビゲーション装置及び施設表示方法」を提供することである。
【構成】 駐車場と提携している施設のリストを表示するナビゲーション装置である。ナビゲーション装置は、車両が所定の駐車場に到着したか監視し、駐車場に到着したとき該駐車場の詳細情報を施設データベースより読み取り、該詳細情報より駐車場と提携している施設を求め、該提携施設のリストをモニターに表示し、必要な提携施設の詳細情報を選択的に表示する。
(もっと読む)
合流退出判定装置及び合流退出判定プログラム
【課題】GPS信号が受信できない状況にある場合であっても合流又は退出の判定を適切に行なうことができる区間を拡大し、利便性を向上させる。
【解決手段】GPS信号に基づく第一自車位置情報P1と走行軌跡に基づく第二自車位置情報P2とに基づいて自車位置を特定する自車位置特定手段12と、自車位置特定手段12により特定された自車位置に基づいて、二本の道路の接続地点における合流又は退出を判定する合流退出判定手段17と、自車両がGPS信号を受信可能な感応区間を走行中には合流退出判定手段17に判定処理を実行させるとともに、不感応区間を走行中には合流退出判定手段17に判定処理を禁止させる判定制御手段20と、自車両が不感応区間を走行中であっても、第二自車位置情報P2に関する条件を含む所定の許可条件を満たす場合には、合流退出判定手段17に判定処理を実行させる特別制御手段24と、を備える。
(もっと読む)
ナビゲーション装置およびナビゲーション装置の表示方法
【課題】 従来の外部の明るさに応じて画像を生成する際の配色データと、輝度およびコントラスト等を切り替えるナビゲーション装置では、一律にナビゲーション装置が表示する画面全体の配色等を切り替えている。しかし、夜間等車外が暗い場合に運転者の視界を妨げる可能性がある。本発明の目的は、ナビゲーション装置において、運転者の視野を妨げにくい表示技術を提供することにある。
【解決手段】 本発明のナビゲーション装置は、表示部を備えるナビゲーション装置であって、自車の走行状況を取得する走行状況取得部と、前記表示部に表示するべき情報を複数の表示領域に分割する分割処理部と、前記分割処理部により分割した表示領域ごとに、前記走行状況取得部によって取得した前記走行状況に応じて、コントラスト、濃度、色合いのうち少なくとも一つの描画属性を変更して表示する描画処理部と、を備える。
(もっと読む)
車載ナビゲーション装置及び車両方位変更箇所判定プログラム
【課題】ターンテーブル設置箇所のような車両方位変更箇所をより高い信頼度で判定する技術を提供する。
【解決手段】自車両の方位変化量と移動距離とによって自車両の進行方位を表す進行方位情報に基づいて自車両の走行軌跡を生成する走行軌跡生成部16と、GPS測位によって取得された自車両位置情報前記自車両位置情報に基づく自車両位置と走行軌跡の先頭部の位置との間の所定値以上の位置ずれを検出する位置ずれ検出部17と、位置ずれ検出時に走行軌跡を剛体変換しながら道路パターンと間でパターンマッチング処理を行う走行軌跡マッチング処理部20とが備えられ、パターンマッチング処理でパターン一致した道路パターンを真の走行軌跡とみなして自車両の位置を一致した道路パターンの先頭部としと、パターン一致した走行軌跡のための剛体変換の基点を車両方位変更箇所と判定する。
(もっと読む)
ナビゲーション装置およびナビゲーション方法
【課題】 従来、ナビゲーション装置において、贈答品を購入する条件を予め登録しておき、条件に合致した場合に、誘導経路に近接する地域から贈答品を探索し、その販売店への経路を案内することでお土産の買い忘れ等を防ぐナビゲーション装置がある。しかし、商品の銘柄等、嗜好性の強い商品では重要となる情報を特定して購入する際の補助を行うことができない。
本発明の目的は、ナビゲーション装置において、特定の商品の銘柄を取り扱っている店舗への経路案内を行うための技術を提供することにある。
【解決手段】
本発明の小売店情報提供システムでは、ナビゲーション装置は購入予定の商品の登録を受け付け、経路探索の際にその経路に沿って存在する店舗で購入することのできる登録された購入予定の商品を示し、経路誘導時に当該店舗に近づくと報知する。
(もっと読む)
ナビゲーション装置
【目的】希望時間以上滞在できなかったために選択できなかった優先順位の高い施設を、到着予定時刻が早まったとき、立ち寄り施設あるいは目的施設として再設定できるようにする「ナビゲーション装置」を提供することである。
【構成】同一方面の複数の施設を候補施設として検索し、該検索された施設への到着予定時刻を計算し、施設のクローズ時刻と到着予定時刻より求まる滞在可能時間が滞在希望時間以上の候補施設のうち、優先順位が最高の候補施設を目的施設あるいは立ち寄り施設として決定する。そして、目的施設あるいは立ち寄り施設への経路誘導と並行して、到着予定時刻が所定時間以上早まったか監視し、早まれば、現目的施設あるいは立ち寄り施設より優先順位が高い候補施設における滞在可能時間が滞在希望時間より大きくなったか調べ、大きければその旨を表示する。
(もっと読む)
ナビゲーション装置
【課題】案内中のルートとの関係をより容易に把握できるように交通事象を提示する「ナビゲーション装置」を提供する。
【解決手段】推奨ルートが500のように設定されている状態において、位置501で工事が行われており、当該工事の影響で区間502に渋滞が発生しており(a)、この工事を交通事象として通知する交通情報が選択交通情報としてユーザによって選択された場合、選択交通情報が表す工事が行われている位置501に対応する、地図画像301上の位置に、工事を表すアイコン511を点滅表示すると共に、当該工事の影響を受けている区間502のうちの、推奨ルート500上の区間を、地図画像301上で表す区間標示図形512を点滅表示する(c)。
(もっと読む)
位置算出方法及び位置算出装置
【課題】カルマンフィルター処理を用いた位置算出において算出位置の直進性を向上させること。
【解決手段】位置算出装置を具備した携帯型電話機において、カルマンフィルター処理で用いる位置変化の許容度を表す位置変化許容パラメーターの値を、検出された移動方向に基づいて設定する。そして、設定した位置変化許容パラメーターの値を用いてカルマンフィルター処理を実行して位置を算出する。
(もっと読む)
車載器
【課題】車両がGPS信号を受信できない場所を通過した直後の画面上での自車位置の修正を高精度に行う車載器を提供すること。
【解決手段】地図の各区間の道路に属性情報を付して記憶した属性情報記憶手段と、属性情報に基づき、自車に近接するGPS信号の受信ができない非受信区間を検知する非受信区間検知手段と、自車に近接する非受信区間が検知された場合に、GPS衛星の捕捉状態を監視するGPS衛星捕捉監視手段と、GPS衛星捕捉監視手段により検知されるGPS衛星の捕捉が無い期間中に、自車が移動した距離を自律航法による測位に基づき計算する移動距離計算手段と、移動距離計算手段により計算された距離と、非受信区間検知手段により検知された非受信区間の地図上の距離に基づき、該非受信区間を通過した自車の画面上における位置を修正する自車位置修正手段とを有する車載器を提供する。
(もっと読む)
車両乗降支援システム、基地局及びユーザ端末
【課題】客による車両の乗降を支援する。
【解決手段】バス停Sの基地局3は、ユーザ端末4及び車両端末5と通信することにより、ユーザUの位置情報及びバスBの位置情報を正確に算出する(S821)。バスBの位置情報に基づいて、バスBがバス停Sに停車中か否かを判定する(S822)。停車中であれば(S822のY)、ユーザ端末4から希望の路線ID及び目的地IDを受信し、車両端末5から車両の路線ID及び目的地IDを受信する(S825)。当該バスBがユーザUの希望条件に合うか否かを判定する(S826)。希望条件に合えば(S826のY)、ユーザUの位置情報及びバスBの位置情報に基づいて、バスBの乗車口に到達するためにユーザUが進むべき方向及び距離、バス停IDを含む乗車誘導情報を作成し、ユーザ端末4に送信する(S827)。ユーザ端末4は、基地局3から乗車誘導情報を受信し、ユーザUに向けて出力する(S828)。
(もっと読む)
ナビゲーション装置
【課題】ユーザが所望する施設情報を自動的に画面に表示させることができるナビゲーション装置を提供する。
【解決手段】施設データを含む地図データを記憶する地図データベース20と、スクロールの指示に基づき描画の中心位置を指定する表示中心指定部32と、この指定された描画の中心位置から一定距離の範囲に存在する施設データを地図データベースから探索する施設データ探索部33と、探索された施設データを解析して施設の統計情報を生成する探索情報解析部34と、生成された統計情報を含むサブウインドウを表示するための表示データを生成する探索情報表示部35と、描画の中心位置を中心とする地図を表示するための表示データを生成する地図表示部36と、地図表示部からの表示データに基づき作成された地図上に、探索情報表示部からの表示データに基づき作成されたサブウインドウを重ねて表示させる地図生成部22を備えている。
(もっと読む)
検索システム、ナビゲーション装置及び検索プログラム
【課題】繰り返し行われることがあるPOI探索において、選択可能な複数の検索手法から選択される一種以上の検索手法を使用して検索を行う場合にあって、検索要件を満たすPOIにできるだけ迅速に到達することができる施設検索システムを得る。
【解決手段】受付手段4aにより受付られた検索手法である第1検索手法の検索要件である第1検索要件を満たす検索対象地点が、地点検索手段4bにより抽出されなかった場合に、第1検索手法とは異なる検索手法である第2検索手法を、受付手段4aが受付可能に構成され、第2検索手法の検索要件である第2検索要件を満たす検索対象地点が抽出された場合に、当該抽出された検索対象地点の第1検索手法での検索要件を出力する適正検索要件出力手段4fを備える。
(もっと読む)
経路探索装置、経路探索方法、経路探索プログラムおよび記録媒体
【課題】右左折する交差点を見逃したり、間違えたりすることを回避すること。
【解決手段】取得部102によって取得された移動体の位置に関する位置関連情報に基づいて、算出部103によって、移動体の現在地点の位置情報を算出する。つぎに、精度判定部104によって、移動体の現在地点の位置情報の精度が悪いと判定された場合、範囲判定部105によって位置精度低下範囲を判定する。そして、探索部106によって、位置精度低下範囲を脱出してから所定距離を道なりに移動する経路を探索する。
(もっと読む)
車両用運転支援装置
【課題】逆走状態をより正確に判断して接触事故を防止することを可能にする。
【解決手段】車両の現在位置を検出する位置検出手段と、水平面に対する道路上の区間ごとの傾斜度の情報を含む地図データを記憶する地図データ記憶手段と、前記位置検出手段が検出した前記車両の現在位置と、前記地図データ記憶手段に記憶された地図データとに基づいて、前記車両の現在位置を道路上の区間にマッチングさせるマップマッチング処理を実行するマップマッチング手段と、水平面に対する前記車両の傾斜度を計測する傾斜度計測手段と、前記マップマッチング手段でマッチングさせた道路上の区間の傾斜度が、前記傾斜度計測手段で計測した傾斜度と所定の値以上異なっているか否かを判定する第1一致判定手段と、前記第1一致判定手段での判定結果に基づいて、前記車両が逆走状態であるか否かを判断する逆走状態判断手段とを備えている。
(もっと読む)
ナビゲーション装置、位置決定システム及び方法
ナビゲーション装置(200)は、識別できる基地局(282,286,290)によってサポートされた無線通信ネットワーク(280)を介してデータを通信する無線通信ユニット(228)を備える。装置(200)は、使用中に、作動環境(262)をサポートするように構成された処理リソース(202)をさらに備え、作動環境(262)は、無線通信ユニット(228)によって受信できる、識別できる基地局(282,286,290)のアイデンティティの少なくともいくつかを、現在位置において無線通信ユニット(228)から受信するように構成された位置決定モジュール(268)をサポートする。位置決定モジュール(268)は複数のデータ関連付けエントリを含むデータ記憶部(214,160)にアクセスすることがでる。データ関連付けエントリの各々は、識別できる基地局のいくつかの記憶されたアイデンティティと、いくつかの記憶されたアイデンティティが受信できる位置に関連付けられた位置識別子とを含む。位置決定モジュール(268)はさらに、複数のデータ関連付けエントリからいくつかの記憶されたアイデンティティに関連する現在位置を決定するように構成されている。 (もっと読む)
方位センサの補正係数演算装置及び演算プログラム
【課題】方位変更の前後におけるGPS情報と方位センサ情報とに基づいて、方位センサ情報を補正するための補正係数を演算する場合において、方位センサの静的な設置角度及びその設置角度の動的な変化を考慮した動的補正係数を適切に演算することが可能な方位センサの補正係数演算装置等を提供する。
【解決手段】方位変更の前後におけるGPS方位変化量とセンサ方位変化量との差異に基づいて、方位センサ情報の基本補正係数を演算し、方位センサ4の検出軸Xの静的な設置角度αに応じて基本補正係数を補正した静的補正係数を演算し、方位センサ4の検出軸X方向の動的変化角度βに応じて、静的補正係数を動的に補正して動的補正係数を演算する。
(もっと読む)
ナビゲーション装置およびナビゲーション方法
【課題】装置構成を比較的簡略化した場合でも、地図情報上の車両位置の誤差を適切に補正することができるナビゲーション装置を提供する。
【解決手段】自車両の実際の座標位置と推定される推定座標位置B1を検出する推定座標位置検出手段と、推定座標位置検出手段により検出された推定座標位置B1に基づいて、地図情報に含まれる道路リンク上における自車両の座標位置である地図座標位置P1を算出する地図座標位置算出手段と、地図座標位置P1が存在する道路リンクの回転半径の中心点Oを算出する中心点算出手段と、中心点算出手段により算出された中心点Oと、推定座標位置B1と、道路リンクとに基づいて、地図座標位置P1を補正する座標位置補正手段と、座標位置補正手段により補正された地図座標位置A1を表示する表示手段50と、を有することを特徴とするナビケーション装置。
(もっと読む)
地図情報作成装置、地図情報作成方法、移動体位置測定装置、及び、移動体位置測定方法
【課題】車両12に地図情報作成装置1を搭載して、道路の必要な地点を通過しながら次々に地図情報を作成する。
【解決手段】移動体の位置を検出して位置情報を生成する位置検出部4と、移動体の移動方向を望む景観を異なる位置から撮像した互いに異なる複数の景観画像を生成する景観撮像部5と、その景観撮像部5の撮像を開始する撮像開始信号を生成する撮像タイミング生成部6と、景観画像に基づいて検出された位置情報を関連付けた景観情報を生成し、景観情報を記憶媒体に記憶する地図情報作成部7とを備える。
(もっと読む)
車両位置測定システム、車両位置測定装置、サーバ装置、車両位置測定装置用プログラム、サーバ装置用プログラム及び車両位置測定方法
【課題】航法衛星から送信されてくる情報に基づいた補正情報を得る前に、車両の挙動の検出結果を用いて得られる当該車両の位置の誤差を低減させる。
【解決手段】ナビゲーション装置2の自立測位処理部212が、補正データを算出する前に、搭載車両の型式情報を含む補正データリクエストをホストサーバ1に送信し、ホストサーバ1の制御部11が、当該リクエストに含まれる型式情報に対応する補正データがデータベースに登録されている場合には、当該対応する補正データをリクエスト元のナビゲーション装置2に送信し、自立測位処理部212は、補正データを算出するまでは、受信した補正データを用いて走行距離を補正する。また、自立測位処理部212は、補正データを算出すると、当該補正データと搭載車両の型式情報とをホストサーバ1に送信し、制御部11は、受信した補正データと型式情報とを対応付けてデータベースに登録する。
(もっと読む)
101 - 120 / 529
[ Back to top ]