
Fターム[2F129BB66]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 航行中 (529)
Fターム[2F129BB66]に分類される特許
141 - 160 / 529
情報処理装置、方法、プログラム、及び情報配信システム
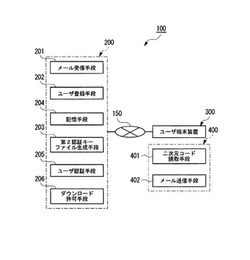
【課題】ユーザが所定の情報をダウンロードする際に、ユーザの認証を厳重にすると共に、ユーザがダウンロードした所定の情報をユーザ所有の情報処理装置以外の情報処理装置で使用するのを抑制できる技術の提供を課題とする。
【解決手段】メール受信手段201と、ユーザ登録手段202と、地図情報等を記憶する記憶手段204と、バージョン番号、及びナビゲーション装置の識別情報を含む第2認証キーファイルを生成する第2認証キーファイル生成手段203と、受信した電子メールの差出人欄に含まれる電子メールアドレスと、登録されている電子メールアドレスとが一致するか否かを判定し、一致する場合にユーザであることを認証するユーザ認証手段205と、ユーザPC300が記憶手段204にアクセスし、地図情報等をダウンロードするのを許可するダウンロード許可手段206と、を備える。
(もっと読む)
ナビゲーション装置

【課題】ナビゲーション装置のハード構成の共通化を実現し、かつ、利用者に応じてナビゲーション装置に格納されている可搬型記録媒体の出し入れを規制できる技術を提供する。
【解決手段】可搬型記録媒体から読み出される地図データを用いてナビゲーション画面を表示部に表示するナビゲーション装置において、可搬型記録媒体の出し入れを制限する手段を設け、更に、本来的に割り当てられている操作部に対して、特定の操作によって制限を解除できる機能を割り当てることとした。
(もっと読む)
物体挙動推定方法および物体挙動推定装置
【課題】変形による影響も含む物体の特定領域全体の挙動を正確に把握することにある。
【解決手段】物体挙動推定装置10において、並進加速度取得部は、挙動を推定すべき車両12において、例えば第1加速度センサ18A〜第7加速度センサ18Gなど、直線上にない3以上の個所に配置された並進3軸の加速度センサ18の各々の検出値を取得する。挙動推定部は、取得した検出値に最小二乗法を用いた演算を施して車両12の角速度ベクトルおよび角加速度ベクトルを推定する。
(もっと読む)
角速度センサ補正装置および角速度センサ補正方法
【課題】起動してから短期間であっても角速度の導出精度を向上したい。
【解決手段】GPS測位部20は、GPS衛星からの信号を受信して、対象物の方位が少なくとも含まれたGPS測位データ200を出力する。角速度センサ26は、対象物における角速度を出力する。オフセット値演算部28は、測位データと角速度とをもとに、対象物の走行状態を推定する。オフセット値演算部28は、推定した対象物の走行状態に応じて、角速度センサの仮のオフセット値を逐次導出する。オフセット値演算部28は、角速度センサの仮のオフセット値に対して統計処理を実行することによって、角速度センサのオフセット値を導出する。ここで、統計処理の際の忘却係数は、対象物の走行状態に応じて変更される。
(もっと読む)
バッテリ情報提供装置、方法およびプログラム
【課題】高効率および低コストで走行予定経路を走行することができなかった。
【解決手段】バッテリの電力によって駆動される車両の走行予定経路を取得し、前記車両が前記走行予定経路を走行する際の電力の使用状況を推定し、前記使用状況に応じた電力を出力するために搭載すべきバッテリを示すバッテリ情報を取得し、前記バッテリ情報を案内する。
(もっと読む)
情報処理装置、画像処理装置、及び画像処理プログラム
【課題】車内に配置されたタッチパネルに表示される操作ボタンの操作性を低下させることなく、各画面の対応関係を容易に認識可能にする情報処理装置、画像処理装置、及び画像処理プログラムを提供することを課題とする
【解決手段】情報処理装置1であって、タッチパネル21と、ナビゲーション画面内にナビ操作ボタンが配置される画像を生成する画像生成部57と、画像生成部57を制御する表示制御部51と、を備え、画像生成部57は、タッチパネル21の表示面の一部を画定する所定第一領域にナビ操作ボタンが配置される画像を生成すると共に、表示制御部51が所定画面の呼出操作を受け付けると、ナビ操作ボタンが所定第一領域に配置されたままの状態で、ナビゲーション画面と所定画面との境界がスライドしながら所定画面が表示される画像を生成する。
(もっと読む)
ナビゲーション装置、ナビゲーション装置の表示方法、ナビゲーション装置の表示方法のプログラム及びナビゲーション装置の表示方法のプログラムを記録した記録媒体
【課題】本発明は、例えばPNDとして使用可能なカーナビゲーション装置に適用して、PNDとして使用する場合の現在位置の誤った表示を防止する。
【解決手段】本発明は、通常モードではマップマッチングにより補正した現在位置に現在位置のマークを配置して地図を表示し、徒歩モードでは、このマップマッチングによる補正を中止して地図を表示する。
(もっと読む)
移動体用測位システム及びGNSS受信装置
【課題】測位精度を向上させること。
【解決手段】GNSS衛星により送信された測位信号に基づいて測位演算を行う移動体用測位システムは、基準局と移動体とを有する。基準局は、固定位置に配置され、該基準局で観測して得られる衛星電波のドップラレンジに基づいて該基準局の速度を測位し、該測位結果に基づいて補正データを生成する手段と、補正データを移動体に送信する手段とを有する。移動体は、基準局から送信される補正データを受信する手段と、該移動体で観測して得られる衛星電波の観測データと、受信した補正データとに基づいて、該移動体の位置を測位する測位手段とを有する。
(もっと読む)
ナビゲーション装置、および、地図の表示方法
【課題】目標物となる施設と推奨経路との位置関係について、ユーザの把握を容易にする技術を提供する。
【課題を解決するための手段】
本発明のナビゲーション装置100の演算処理部1は、地図上に推奨経路を表示して経路誘導を行う経路誘導部105と、推奨経路の左右で異なる特徴を有する画像を、地図上に表示する左右区分け画像処理部106と、を備える。左右区分け画像処理部106が表示する画像は、例えば、推奨経路の左側における地図領域が第1の色である特徴を有し、推奨経路の右側における地図領域が第1の色とは異なる第2の色である特徴を有する。
(もっと読む)
走行経路評価システム及び走行経路評価プログラム
【課題】例えば燃料消費量の抑制や所要時間の短縮等の推奨経路を提示した目的の達成度を向上させるために、推奨経路を走行することに対する運転者の意識向上を図ることが可能な走行経路評価システムを提供する。
【解決手段】車両の走行環境に関する情報である走行環境情報及び地図データ23に基づいて、出発地から目的地までの推奨経路を設定する経路設定手段16と、車両が走行した経路中に占める推奨経路上を走行した割合である推奨経路走行割合を算出する割合算出手段25と、推奨経路走行割合に基づいて評価情報を取得する評価情報取得手段26と、を備える。
(もっと読む)
車両用減速制御装置及び車両用減速制御方法
【課題】カーブに対する車両の減速制御を適切に行う。
【解決手段】車両用減速制御装置は、測位部14aが測位した車両位置と記憶媒体14cに記憶された地図情報とを基に、地図情報の地図上の車両位置を特定するマップマッチングを行うマップマッチング部14bと、マップマッチング部14bが特定した地図上の車両位置と地図情報とから、車両前方のカーブ曲率を検出し、検出したカーブ曲率の大きさを基に算出した目標減速度を基に、車両を減速制御する制駆動力コントロールユニット8と、を備える。制駆動力コントロールユニット8は、マップマッチング部14bによるマップマッチングの確度を算出し、算出したマップマッチングの確度が低いほど、目標減速度が小さくなるように補正する。
(もっと読む)
運転評価システム及び運転評価プログラム
【課題】地図データを更新する際のタイムラグに起因する誤評価を抑制することができる運転評価システムを提供する。
【解決手段】地図データ34に含まれる道路特性に応じた車両の運転状況を評価し、当該評価に基づく評価結果を含む評価情報35を取得する評価情報取得手段14と、評価情報35を記憶する評価情報記憶手段32と、道路特性の変更を地図データ34に反映させるための更新データを取得して、地図データ34の更新を行う更新処理手段17と、地図データ34が更新された際に、現実の道路特性の変更時から当該道路特性の変更を反映する地図データ34の更新時までの間に取得された評価情報35が有する評価結果を、更新後の地図データ34に含まれる道路特性に基づいて再検討する再検討手段18と、を備えた運転評価システム。
(もっと読む)
測位装置
【課題】無駄な電力消費を減らすことができ、且つ、装置の使用中に移動速度が変化した場合でも、適宜な間隔でGPS測位処理を実行することのできる測位装置を提供する。
【解決手段】電源用のバッテリと、このバッテリにより駆動されw、GPS衛星からの測位用電波を受信して現在位置を測定する第1の測位手段とを備えた測位装置である。そして、当該測位装置における装置本体の移動速度を検出する移動速度検出手段(S1,S2)と、この移動速度検出手段により検出された移動速度が所定値以下か否かを判別する判別手段(S3)と、この判別手段により前記移動速度が所定値以下と判別された場合に、前記第1の測位手段を間欠的に駆動させる間欠駆動手段(S11〜S15)とを備えている。
(もっと読む)
現在位置算出装置および現在位置算出方法
【課題】現在位置の表示位置の精度を向上できる現在位置算出装置および現在位置算出方法を提供する。
【解決手段】信頼度trstが最も高い表示候補点の入れ替わりがあった場合、信頼度trstが最も高い表示候補点の入れ替わりに係る各表示候補点が存在する2つの道路が同一の道路から分岐した道路であれば、当該2つの道路間の距離で、信頼度trstが最も高い表示候補点の道路上の位置を補正するように構成した。これにより、信頼度trstが最も高い表示候補点の入れ替わりの原因となる、算出される現在位置と実際の車両位置とのずれを減らして、表示モニタ14に表示されるカーマークの位置を実際の車両位置に近づけることができ、現在位置の表示位置の精度を向上できる。
(もっと読む)
車載装置
【課題】加速度センサによる加速度の測定結果の精度が悪い場合に、精度の悪い加速度の測定結果に基づく処理の実行を回避することができるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置は、自車両が交差点に進入する場面や、高速道路の本線に進入する場面等である運転診断場面が発生すると、加速度センサにより測定された自車両の加速度と、自車両の車速及び角速度に基づき特定された自車両の加速度との差分に基づき、加速度センサにより測定された自車両の加速度の精度について判定する(S115)。そして、ナビゲーション装置は、上記差分が所定の値以内である場合に限り、加速度センサにより測定された自車両の加速度に基づき、自車両の運転についての運転診断を行う(S120)。
(もっと読む)
ナビゲーションシステムの位置検出装置および位置検出方法
【目的】センサー数が少ないシステムであっても、位置精度や方位精度を向上できるようにする「ナビゲーションシステムの位置検出装置および位置検出方法」を提供することである。
【構成】車速センサーと加速度センサーと角速度センサーとを含むセンサー部、これらセンサーから出力される信号を用いて所定の周期で車両の現在位置、車両速度、車体の姿勢角を含む状態量を計算する自律航法計算部を備え、車両の位置を検出するナビゲーションシステムの位置検出装置である。自律航法計算部は、車速センサーから出力される信号を用いて前回の状態量計算時刻から今回の状態量計算時刻までに移動した移動量を計算する移動量算出部、車体の姿勢変化量を計算する変化量検出部、姿勢変化量を用いて移動量を車体の前後方向、車体の左右方向、車体の上下方向の方向成分に分解する移動量分解部、各方向成分を用いて今回の状態量計算時刻における車両の位置を計算する状態量計算部を備えている。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、およびナビゲーションプログラム
【課題】現在位置を取得するための消費電力を低減することによって、目的地点に到着する前に電池がなくなることを防止できるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置100は、外部から受信した測位信号に基づいて現在位置を取得する位置取得手段106Eと、加速度を取得する加速度取得手段107Aと、現在位置と加速度とに基づいて現在位置を更新する位置更新手段106Fと、目的地までの経路を生成する経路生成手段106Bと、経路上に少なくとも1つの測位地点を設定する第1の設定手段106Cと、現在位置が測位地点に一致したと判断した場合は位置取得手段を機能させ、現在位置が測位地点に一致していないと判断した場合は加速度取得手段と位置更新手段とを機能させる切替手段106Dと、表示部110Bに地図上に現在位置を表示させる表示制御部106Gとを備える。
(もっと読む)
車両ナビゲーション装置及び携帯電話機を用いた経路探索システム
【課題】実用性に優れた経路探索を可能とする。
【解決手段】センター装置3は、携帯電話機25が無線基地局23に対して位置登録している状況に基づいて人の密集度に対応する経路コストを生成し、車両ナビゲーション装置2は、外部メモリ11に記憶されている経路コストをセンター装置3から受信した経路コストで更新し、車両の現在位置から目的地に至るまでの経路探索を当該更新した経路コストを用いて行う。車両の現在位置から目的地に至るまでの経路探索を携帯電話機25が無線基地局23に対して位置登録しているという動的に変化する状況を反映させて行える。
(もっと読む)
センサ誤差補正装置及び方法、傾斜測定装置並びにアンテナ制御システム
【課題】微小な傾斜角度に関しても傾斜センサで高精度に検出可能とするためのセンサ誤差補正装置及び方法、傾斜測定装置、並びにアンテナ制御システムを提供する。
【解決手段】センサ誤差補正装置100は、傾斜センサ200を設置平面内で回転させる駆動部101と、傾斜センサ200の出力電圧が最大値又は最小値を示す回転角に対して90度ずれた回転角を算出する基準角度検出部102と、算出した回転角における出力電圧を基準値として傾斜センサ200の出力を補正する出力補正部103とを有する。
(もっと読む)
ロバストなロケーション推定
位置の信頼できる推定を補足するために情報を収集する方法が提供される。方法は、第1の位置の信頼できる推定を導き出すのに十分な第1の情報を受信するステップと、第1の位置の付近の第2の位置の補足の推定が要求されうることを示す指示を受信するステップと、指示に応答して、第1の位置の付近の観測可能な少なくとも1つの地上無線ソースの識別を備える情報を検知することと、検知された情報を第1の位置に関連して格納するステップとを備える。方法は、第1の位置の信頼できる推定が、続いて少なくとも1つの無線ソースが観測可能である任意の前記第2の位置を推定するために使用されるようにすることができる。 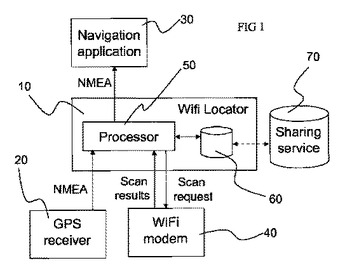 (もっと読む)
(もっと読む)
141 - 160 / 529
[ Back to top ]