
Fターム[2F129DD29]の内容
航行(Navigation) (246,646) | 検索/探索 (24,832) | 検索/探索の方法・条件 (19,573) | 道路情報 (1,426)
Fターム[2F129DD29]の下位に属するFターム
Fターム[2F129DD29]に分類される特許
1 - 20 / 173
回避エリア生成装置及びその方法、並びに回避エリアを生成するためのコンピュータプログラム及びコンピュータプログラムを記録した記録媒体
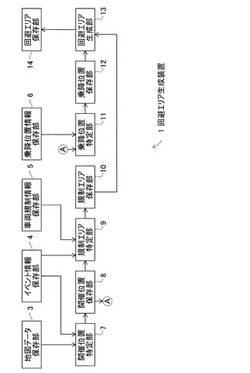
【課題】イベント開催時における、イベント開催位置周辺の車両走行を回避すべき回避エリアを生成する装置及びその方法を提供する。
【解決手段】イベントの開催位置の周辺における回避エリアを生成する方法であって、該イベントの開催に伴う車両の通行規制に関する情報を保存し、地図データ保存部から、該イベントの開催位置を特定し、該車両の通行規制に関する情報を参照して、該イベントに関連付けられ、かつ、該通行規制の付されたエリアを規制エリアと特定し、特定された該開催位置から第1の距離内に設けられた、交通手段の乗降位置を特定し、特定された該乗降位置及び該規制エリアに基づいて生成される第1のエリアを、該車両が回避すべき回避エリアとする。
(もっと読む)
渋滞予測装置、及び、渋滞予測システム

【課題】 降雨量によって刻一刻と変わる渋滞の状況を予測可能な渋滞予測装置を提供する。
【解決手段】 降雨情報収集部が降雨情報算出処理を実行し(S100)、リンクの中心座標での降雨量を算出する。また、交通情報収集部が単位旅行時間算出処理を実行し(S110)、単位旅行時間を算出する。制御部は、前回の予測値である予測リンク旅行時間と真値であるリンク旅行時間との比率からエラー量を計算し(S120)、降雨量及び単位旅行時間で設定されるゲインをエラー量で補正して(S130)、今回の予測リンク旅行時間を出力する(S140)。
(もっと読む)
経路探索装置及び経路情報作成方法
【課題】ドライバの心理状態に基づく各リンクの運転し易さに基づいて経路を探索する。
【解決手段】観察タイミングにおけるドライバの撮像画像を取得する機能と、ドライバの顔の特徴領域をそれぞれ抽出し、その指標量を算出する機能と、算出された指標量と基準となる基準指標量との相関度に基づいて観察タイミングにおける心理状態レベルを判定する機能と、観察タイミングにおいてドライバが存在する走行リンクを特定する機能と、心理状態のレベルに基づいて走行リンクの難易評価値を算出する機能と、走行リンクの難易評価値に基づいて、地図情報200に含まれるリンクの難易評価値を記憶又は更新する機能と、地図情報200を参照して探索された経路に含まれる各リンクの難易評価値に基づいて走行難易度を算出し、走行難易度が低い推奨経路を探索する機能を実行する制御装置10を備えた経路探索装置100を提供する。
(もっと読む)
ナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、ナビゲーション方法、および、プログラム
【課題】電気自動車のバッテリ残量を考慮して、電気自動車を利用したユーザが希望時刻に指定場所に到着できるかを判断し、到着できない場合、公共交通機関による経路を含む代替経路を案内することができるナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、電気自動車を利用する案内経路である電気自動車経路を探索し、電気自動車のバッテリの残存容量および電気自動車経路情報に基づき、電気自動車が到着希望時刻までに目的地に到着できるか否か判定し、電気自動車が到着希望時刻までに目的地に到着できないと判定された場合、電気自動車経路以外の案内経路である代替経路を探索し、電気自動車経路情報または代替経路情報を含む経路案内情報を出力部を介して出力させる。
(もっと読む)
経路案内装置
【課題】 車両が交差点内を円滑に通過できず孤立するおそれがある孤立交差点を反映させて、指定された目的地までの経路を案内する。
【解決手段】 交差点の退出方向に存在する踏切、道路の車線減少部分などの要因地物ごとに、交差点が孤立交差点となる危険値スコアを与える危険値マトリックスを用意する。経路案内装置は、出発地から目的地までの経路探索結果に対し、その経路上の交差点ごとに、危険値マトリックスを参照して、危険値スコアを求め、退出路側に踏み切りが存在する交差点2など、危険値スコアが所定の閾値を超える交差点を孤立交差点として抽出する。そして、孤立交差点を回避する経路を探索し、案内する。
こうすることにより、ユーザは、孤立交差点を通行することを抑制でき、円滑に通行できる経路の案内を実現することができる。
(もっと読む)
運転支援装置および該装置を有する車両
【課題】高精度な航続可能距離を推定することのできる運転支援装置を提供すること。
【解決手段】運転支援装置は、自車両の残エネルギErestと、走行経路の走行によって消費が予測される消費エネルギEsum(k)に基づいて航続可能距離Lを算出するものであって、走行経路と同一の距離を有する勾配のない平坦路を仮定して、その平坦路を基準車速で定速走行する場合に必要なエネルギEbaseと、走行経路の減速と再加速を要する加減速必要区間で必要な加減速を行って走行経路を走行する場合に発生するエネルギ差分である加減速由来補正量ΔEaccdecとを用いて、消費エネルギEsum(k)を算出する。
(もっと読む)
エネルギーコスト予測システム
【課題】データの抽出条件を適切に変更することが可能な技術を提供することを目的とする。
【解決手段】エネルギーコスト予測システムは、エネルギーコスト解析部1により解析されたエネルギーコストに係る走行条件を解析する走行条件解析部2と、エネルギーコスト解析部1により解析されたエネルギーコストと、走行条件解析部2により解析された走行条件との組を、一の車両のコスト実績値として収集するエネルギーコスト収集部4と、各車両のコスト実績値を集約するエネルギーコスト集約部5とを備える。そして、当該システムは、自車両の走行条件と、自車両及び各車両のコスト実績値とに基づいてコスト実績値の第1抽出条件を決定し、かつ、自車両の所望の走行条件と、自車両及び各車両のコスト実績値とに基づいてコスト実績値の第2抽出条件を決定する抽出条件決定部6を備える。
(もっと読む)
交通情報送信装置、方法およびプログラム
【課題】車両の状況に適した範囲の交通情報を送信する技術の提供。
【解決手段】交通情報の送信対象となる対象車両の現在位置における任意の車両の平均車速を第1平均車速として取得し、前記対象車両の走行履歴に基づいて前記対象車両の平均車速を第2平均車速として取得し、前記第1平均車速と前記第2平均車速とに基づいて現在以降における前記対象車両の推定車速を取得し、前記推定車速に対応した範囲の交通情報を送信対象として設定し、前記送信対象の前記交通情報を前記対象車両に送信する。
(もっと読む)
経路探索装置、経路探索方法、及び経路探索プログラム
【課題】外部情報とユーザが設定した情報とが矛盾しないように修正し、外部情報とユーザが設定した情報の両方を有効に利用することで、より優れた経路を提示する。
【解決手段】経路探索装置は、例えば車載用のナビゲーション装置などに好適に適用される。具体的には、経路探索装置は、リンクに割り当てられたコストを記憶し、ユーザ設定情報入力手段と、外部情報取得手段を備え、ユーザ設定情報と外部情報を記憶する。経路探索装置は、同一のリンクに対応する外部情報とユーザ設定情報とが矛盾しないように、外部情報及びユーザ設定情報の少なくとも一方を修正し、修正したユーザ設定情報及び外部情報に基づいてコストを補正する。経路探索装置は、補正されたコストに基づいて、目的地までの経路を探索する。これにより、外部情報とユーザ設定情報が矛盾せず、両方を活用して、より優れた経路を提示することができる。
(もっと読む)
端末装置、地図表示変更方法、およびプログラム
【課題】従来の端末装置においては、装置本体が備えるボタンやタッチパネルへの操作に従い、地図の表示を変更するのみであり、例えば、装置本体が手のひらよりも大きい場合、両手で操作する必要があった。
【解決手段】地図情報を格納し得る地図情報格納部と、端末装置の筺体の動きに関する動作条件を格納し得る動作条件格納部と、地図情報の出力指示を受け付ける受付部と、地図情報を出力する出力部と、端末装置の筺体の動きに関する動作情報を取得する動作情報取得部と、動作情報が動作条件に合致するか否かを判断する判断部と、出力部が出力している地図情報を、動作条件に対応するように変更するように指示する制御部とを具備し、出力部は、制御部の指示に従って、出力している地図情報の出力を変更する端末装置により、装置本体の動きに応じて、地図の表示を変更することができる。
(もっと読む)
速度規制値通知装置及び速度規制値通知システム
【課題】自車両の走行中の道路の速度規制値を推定して通知する場合に、誤った速度規制値の通知による乗員の速度規制値に対する誤認識をより抑えることを可能にする。
【解決手段】位置情報取得部13で取得した位置方向情報と地図データ取得部14で取得した地図データとをもとに、速度規制標識を検出した位置から所定距離内に分岐点が存在するか否かを判定し、この判定結果に応じて、速度規制値推定部12で推定した速度規制値が自車両の走行中の道路の速度規制値であるか否かを判断し、推定速度規制値が自車両の走行中の道路の速度規制値であると判断しなかった場合に、通知部18での推定速度規制値の通知の保留や通知内容の変更を行う。
(もっと読む)
乗り物のナビゲーション装置および方法
【課題】道路を正しく識別する際にユーザーを助ける乗り物のナビゲーション装置および方法を提供すること。
【解決手段】乗り物のナビゲーション装置は、マップデータを格納するマップデータベースを含む。マップデータは、道路セグメント、道路番号アイコンおよび追加道路情報アイコンを表すリンクを含む。リンクのうちの少なくとも1つは、道路番号アイコンのうちの少なくとも1つおよび追加道路情報アイコンのうちの少なくとも1つに関連する。乗り物のナビゲーション装置は、マップデータベースに結合されており、出力装置を介したルートガイダンス情報の出力を制御するように構成されている処理ユニットをさらに含む。
(もっと読む)
道路網解析システム
【課題】 プローブ情報に基づいて重要な道路網の変化を検出する。
【解決手段】 複数のプローブカー10からのプローブ情報を日ごとに集計し、日単位での通行量の変化を道路ごとに算出する。そして、特定の基準日前後で通行量が顕著に変化している道路が検出された場合には、その周辺で、交通に影響を与える重要な道路網の変化があったと判断し、その道路を変化関連道路とする。次に、複数の変化関連道路の端点間で経路探索を行って、探索された経路と変化関連道路との重なりが多いものを選択し、一つの原因によって共通して影響を受ける関連性のある変化関連道路およびその端点を特定する。このように、通行量の変化と経路探索との利用によって関連性のある箇所を特定することによって、重要な道路網の変化に対して効率的に現地調査を行うことが可能な調査ルート候補を設定することができる。
(もっと読む)
車両走行支援システム、コンピュータプログラム、及び、車両走行支援方法
【課題】路面状態が悪い道路から遠く離れた位置を走行している段階であっても、当該道路における路面状態を考慮して車両を安全に走行させるように、走行支援する。
【解決手段】プローブ車両3aの取得部21は、セーフティ装置10が作動したことを意味する作動情報を、道路位置及び日時の情報を含めて取得する。プローブセンタ2において、収集部22は、路面状態に影響を与える環境についての環境情報を、日時の情報を含めて、1又は複数の道路位置について収集し、環境情報と作動情報とが、道路位置及び日時の情報を関連付けの基準として、関連付けられてデータベース26に蓄積される。判定部23は、所定の道路位置についての環境情報が取得されると、この環境情報と関連付けられている作動情報をデータベース26から検索し、関連付けられている作動情報があると、前記所定の道路位置は路面状態が悪い可能性があると判定する。
(もっと読む)
自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法
【課題】車両の進行方位が道路の延在方位と異なる場合であっても推定自車位置を適切に補正することが可能な自車位置認識システム及び自車位置認識プログラムを実現する。
【解決手段】道路の延在方位EDに平行な方位を基準方位SDとして設けられた路面上の地物を対象地物Mとして、撮影画像に含まれる対象地物Mの画像認識処理を行う画像認識部と、画像認識部により認識された対象地物Mと自車両100との相対方位RDと、自車両100の進行方位MDとに基づき、対象地物Mの基準方位SDを特定する基準方位特定部と、推定自車位置EPの周辺の道路情報に基づき、基準方位特定部により特定された基準方位SDと延在方位EDが一致する道路上の位置である地物方位一致位置P0を検出し、当該地物方位一致位置P0に基づき推定自車位置EPを補正する地物利用自車位置補正部と、を備える。
(もっと読む)
ナビゲーション装置
【課題】推奨レーンの案内に際して使用者が混乱することを抑制できるナビゲーション装置の実現が望まれる。
【解決手段】撮影装置21により撮影した画像情報Gに含まれる地物の画像認識結果に基づいて自車両の走行レーンを判定するレーン判定部8と、レーン案内地点のそれぞれにおいて自車両の走行レーンを画像認識により判定するため必要な地物である必要認識地物Frを、案内経路に含まれる全てのレーン案内地点について抽出する必要認識地物抽出部34と、抽出された必要認識地物Fr各々についての画像認識の成功率である認識率を導出する認識率導出部31と、必要認識地物Fr各々の認識率に基づいて、案内経路の全体に亘る推奨レーン案内の方法を、相対レーン案内及び絶対レーン案内のいずれかに統一するように決定する案内方法決定部35と、を備えるナビゲーション装置。
(もっと読む)
道路推定装置
【課題】 配信されるコアポイントの情報から、車載機側に用意される地図データ上で該当するリンクを効率的にかつ精度良く抽出し、コアポイントが示す道路を推定する道路推定装置を提供する。
【解決手段】 リンクの候補を選定する候補選定処理において、非形状系の属性に関し、判定対象となるリンクの属性に基づく一致判定を行い(S310)、この非形状の属性での判定結果に基づき、リンクの絞り込みを行う(S320)。次に、形状系の属性に関し、判定対象となるリンクの属性に基づく一致判定を行い(S330)、この形状系の属性での判定結果に基づき、リンクの絞り込みを行う(S340)。
(もっと読む)
通信装置
【課題】ユーザが安心・安全に信号機が設置された交差点を通過・通行できるように支援する通信装置を提供する。
【解決手段】他の通信装置と通信を行う通信装置であって、少なくとも信号機の現在の信号表示情報及び信号機の信号表示方向の方位角を含む信号機情報を受信する通信部と、前記通信装置の進行方向の方位角と、前記信号機の信号表示方向の方位角と、に基づいて方位角差を算出し、前記方位角差に基づいて報知設定すると共に、前記信号機の現在の信号表示情報に基づいて報知部を制御して前記報知設定に基づく報知を行う制御部と、を備える。
(もっと読む)
道路推定装置
【課題】 配信されるコアポイントの情報から、車載機側に用意される地図データ上で該当するリンクを適切に抽出し、コアポイントが示す道路を推定する道路推定装置を提供する。
【解決手段】 候補リンク検索処理において、CP(コアポイント)の情報を取得し(S210)、検索範囲を境界が垂直又は水平の線分で構成される多角形として決定する(S220)。最初に、検索範囲のパーセルを取得して(S230)、パーセル単位でリンク列を選定する(S240)。その後、検索範囲に少なくとも一部が含まれるリンクを抽出し(S250)、属性RD及びCPからリンクまでの距離に基づいて、リンクを絞り込む(S260,S270)。
(もっと読む)
ナビゲーション装置
【課題】目的地周辺の道路から目的地へ到達するのが困難な場合においても、適切な推奨経路を探索する。
【解決手段】ナビゲーション装置は、目的地20の位置30から最も近い道路21、22上に目的地対応地点31、32をそれぞれ設定し、位置30と目的地対応地点31、32とをそれぞれつなぐ線分33、34を地図上に設定する。この線分33、34の長さと、線分33、34が地図上で通る地図要素の種類とに基づいて、目的地対応地点31、32に対して追加コストをそれぞれ算出し、各道路に対して予め設定されたリンクコストと算出した追加コストとに基づいて、出発地から目的地までの推奨経路を探索する。
(もっと読む)
1 - 20 / 173
[ Back to top ]