
Fターム[2F129DD48]の内容
航行(Navigation) (246,646) | 検索/探索 (24,832) | 検索/探索の方法・条件 (19,573) | 燃費、効率 (767) | ハイブリッド自動車 (224)
Fターム[2F129DD48]に分類される特許
101 - 120 / 224
車両のレンジファインダ
【課題】車両の走行レンジを最適に予測する。
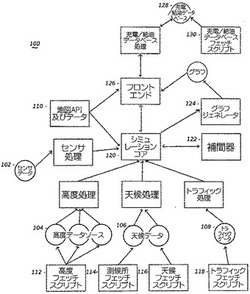
【解決手段】車載システム100は、ハードコードデータ、車両のセンサからのデータ、外部センサからのデータ、ユーザコードデータ、遠隔データベースから受信したデータ、ブロードキャストデータステムから受信したデータ、又は車両使用中に蓄積されたデータを含む入力手段を備え、車両速度、モータの毎分回転数、モータトルク、バッテリ電圧、バッテリ電流、及びバッテリ充電レベル等に関する情報を提供する。システムのプロセッサ装置に具備されるシミュレータコア120は、入力手段からの情報に基づいて予想走行車両レンジを算出する。算出結果は、ディスプレィ装置上でユーザに表示される。
(もっと読む)
ハイブリッド車両の制御装置

【課題】 車両の進行方向での道路の勾配情報に応じて、モータによる車両の駆動力のアシストを制御して、車両の円滑な走行を維持する。
【解決手段】 本発明は、ハイブリッド車両の制御装置を提供する。その制御装置は、ナビゲーション装置からの勾配情報により車両の進行方向に緩やかな傾斜があると判断され、かつアクセルペダル変化量検出手段により検出されたアクセルペダルの変化量が所定値未満である場合、車両の速度を一定に維持すべきと判定する速度維持判定手段と、ナビゲーション装置からの勾配情報に基づいて、車両の進行方向での勾配負荷を算出する勾配負荷算出手段と、勾配負荷算出手段からの勾配負荷に応じて、モータによる車両の駆動力のアシストを制御するアシスト制御手段と、を備える。
(もっと読む)
走行費用算出装置及び走行費用算出システム
【課題】本発明は、所望の施設の料金情報が未知であっても、実際に掛かった走行費用を算出することが可能な走行費用算出装置を提供する。
【解決手段】本発明の一実施形態に係る走行費用算出装置10Aは、施設の料金情報を取得する料金情報取得手段24と、料金情報取得手段24によって取得した料金情報に基づいて走行費用を算出する走行費用算出手段27と、料金情報取得手段24によって取得した料金情報を施設ごとに記憶する料金情報記憶手段53とを備え、走行費用算出手段27は、所望の施設を利用する際に、料金情報取得手段24によって所望の施設の料金情報を取得できない場合に、料金情報記憶手段53に記憶した他の施設の料金情報に基づいて走行費用を算出することを特徴とする。
(もっと読む)
ハイブリッド車両の駆動制御装置
【課題】ハイブリッド車両における燃費の向上を図る。
【解決手段】制御目標値を規定するための第1の情報(車速、道路勾配)と、制御目標値のスケジュールを規定して駆動制御を行うことにより一定の燃費向上効果が得られると推定される計画有効区間を抽出するための第2の情報(区間長、道路勾配等)を一定距離毎に収集し(S200)、第2の情報に基づいて出発地から目標とする地点に到達するまでの区間から計画有効区間を抽出し(S400)、第1の情報を用いて計画有効区間について低燃費となるような制御指標のスケジュールを規定し(S500)、駆動制御を行う。
(もっと読む)
車両走行制御装置
【課題】走行パワーの推定値のバラツキが大きくなるような場合でも精度良く走行パワーの推定を行うことが可能な車両走行制御装置を提供すること。
【解決手段】走行予定経路を走行する場合に必要な走行パワーである必要走行パワーを、車両運転状態に関する動的情報に基づいて推定し、推定された必要走行パワーを発生させるように走行モードの切り替えを行う車両走行制御装置1において、動的情報に基づく必要走行パワーの推定値のバラツキが大きい場合に、走行予定経路における道路状態に関する静的情報に基づいて必要走行パワーを推定する。これにより、信号機の灯色情報などにより走行パワーの推定値(動的情報に基づく必要走行パワー)のバラツキが大きくなるような場合であっても、静的情報に基づいて必要走行パワーを推定することが可能となり、推定精度の向上が図られる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】車両全体としてのエネルギー効率を向上させる。
【解決手段】ハイブリッド車両1の制御装置10は、自車両の位置を検出する現在位置算出部38と、バッテリ16の充電が可能な充電設備の設置位置情報を有する地図データを記憶する地図データ記憶部34と、自車両の現在位置から目的地までの経路情報を取得する経路算出部39と、バッテリ16の残容量を検出する残容量検出部41と、経路情報に基づき各モータ12,14の動力により自車両の現在位置から目的地まで走行した場合の電力消費量を算出し、電力消費量が残容量よりも大きく、かつ、目的地に充電設備が設置されている場合に、目的地に到達した時点で残容量が零となるようにして、内燃機関11および各モータ12,14の運転を制御する出力算出部42とを備える。
(もっと読む)
電動車両のバッテリ充電制御装置
【課題】バッテリ充電のために立ち寄る外部充電拠点の予測精度を高める。
【解決手段】複数の充電拠点が存在する場合、発電による充電が不要でEV走行により到達可能な充電拠点に向かおうとする。一方、バッテリエネルギー残量が多い状態では充電拠点で充電することはなく、第2のバッテリエネルギー設定値円内にある充電拠点で充電することはない。よって、(a)の位置では充電拠点A,B,Cの何れも充電予定地点として選択せず、(b)の位置になると、拠点Aが第1および第2のバッテリエネルギー設定値円間に入ることから、この拠点Aを充電予定地点として選択する。以後は、この拠点Aを用いて目標SOCの設定を行い、この目標SOCに基づくEV走行が開始される。(c)の位置になると、第1および第2のバッテリエネルギー設定値円間における充電予定地点の判定エリアが、拠点Aと接しながら縮小する。
(もっと読む)
ナビゲーション装置及び電気自動車のナビゲーション方法
【課題】駆動用モータの温度上昇をより確実に抑制するように経路を設定できるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置11の情報処理装置12は、探索した目的地までの経路に従って電気自動車1が走行する場合について駆動用モータ3の温度変化を推定し、駆動用モータ3の温度が当該モータ3の性能が劣化するレベルまで上昇しないように経路を変更する。具体的には、各リンクについて設定されるリンクコストとリンクコスト係数とに基づきリンクコストの積算値を計算し、そのリンクコストの積算値を最小にする経路を探索する。また、各リンクについて設定した温度コストと温度コスト係数とに基づいて温度コストの積算値も計算し、その温度コストが駆動用モータ3の性能が劣化する温度に対応して設定される性能劣化閾値を超えないように経路を変更する。
(もっと読む)
プログラム管理装置
【課題】車両に搭載される機器の動作を制御する制御装置のプログラムをユーザに望ましい環境で更新するようにしたプログラム管理装置を提供する。
【解決手段】車両に搭載されるナビゲーション装置(機器)の動作を制御するナビゲーションECU(制御装置)のプログラムを格納するメモリ(ROMあるいはEEPROM)と、車両にとって安全な場所を地図データ上に記憶する安全場所記憶手段(地図データ記憶部)を備えると共に、プログラムの更新がセンタ側から要求されたか否か判定し(S10)、プログラムの更新が要求されたと判定されるとき、車両10の位置を検出し(S12)、検出された車両の位置が安全な場所であるとき、プログラムの更新を許可する(S14からS20)。これに応じてセンタ側からプログラムが送信され、プログラムの更新が行われる。
(もっと読む)
車両用電源制御装置
【課題】金属空気電池と併用して用いられる電源の残量が不足したり、充電が過大となったりすることがなく、効率的な電源運用を行うことが可能な車両用電源制御装置を提供する。
【解決手段】本発明は、車両に搭載される電源を制御する車両用電源制御装置であって、アルミニウム空気電池20と、アルミニウム空気電池20の出力を制御する電池出力制御部70と、車両の現在位置に係る位置情報を取得する位置情報取得部80と、を有し、位置情報取得部80によって取得された現在位置情報に基づいて、電池出力制御部70がアルミニウム空気電池20の出力を段階的に制御することを特徴とする。
(もっと読む)
車載システム
【課題】使用燃料が最も少なく、エネルギーコストが良い走行ルートを確実に車両に配信することを課題とする。
【解決手段】センターは、車両の種別に対応付けて、所定の区間で区切られた道路ごとに当該道路を走行するのに必要とするエネルギーコストを記憶するエネルギーコスト記憶DBを有し、少なくとも車両の種別、現在位置、目的地を含む車両情報を車両から取得する。そして、センターは、取得された現在位置から目的地に到達する走行ルートを特定し、特定した走行ルートを走行するのに必要となる総エネルギーコストを、取得された車両の種別に対応付けてエネルギーコスト記憶DBに記憶される道路ごとのエネルギーコストを用いて算出する。その後、車載装置は、算出された総エネルギーコストが最も少ない走行ルートを用いて、車両に走行案内を行う。
(もっと読む)
車載装置および車載システム
【課題】電気自動車など電気をエネルギーとする車両に、効率良くエネルギーを充電させることを課題とする。
【解決手段】車載装置は、車両駆動に用いるエネルギーとして、少なくとも電気エネルギーを用いる車両に搭載され、車両の走行履歴から車両が利用される運転習慣を特定する。そして、車載装置は、特定された運転習慣に基づいて、すぐに駆動できるだけの電気をすぐに充電するようにしたり、無駄な充電を省いたり、電気代が安い夜に充電を行うようにしたり、余っている電気を他の電気機器に提供したりするように、車両に電気エネルギーを充電する充電計画を作成する。その後、車載装置は、作成された充電計画にしたがって、電気エネルギーを車両に充電する。
(もっと読む)
充電施設予約システム及び充電施設予約プログラム
【課題】予約により確保される時間と、蓄電装置を所望の蓄電量まで充電するために実際に必要となる時間との乖離を抑制することで、運転者の利便性及び充電施設の稼働率を向上させる。
【解決手段】車両の現在位置を取得する現在位置取得手段64と、充電施設への到着予定時刻を取得する到着予定時刻取得手段61と、蓄電装置の現在蓄電量を取得する現在蓄電量取得手段51と、現在位置から充電施設に到達するまでに必要な電力量である必要電力量を算出する必要電力量算出手段54と、現在蓄電量から必要電力量を減算して充電施設に到着したときの蓄電量である到着時蓄電量を算出する到着時蓄電量算出手段55と、到着時蓄電量に基づいて充電時間を算出する充電時間算出手段53と、到着予定時刻と充電時間とに基づいて充電施設の予約を行う充電施設予約手段56と、を備える。
(もっと読む)
車載用報知装置
【課題】車両の運転者に対して回生ブレーキの効率的な利用を促す情報をより効果的に報知するための技術を提供する。
【解決手段】回生教示コンピュータ19は、回生制御コンピュータ20から入力されるブレーキの作動状況に関する情報に基づき、運転者によるブレーキ操作によって減少した運動エネルギ分に相当する制動エネルギのうち、回生ブレーキシステムによる回生によって回収できなかった損失エネルギに関する損失情報を導出する。そして、その導出した損失情報に基づいて、車両の走行前、走行中、走行終了後の各場面において損失エネルギに関する所定の情報を生成し、その生成した情報を運転者に報知する。
(もっと読む)
情報処理端末、情報処理装置、情報処理システム、情報処理方法、および、プログラム
【課題】より適切に充電スタンドの案内を行う。
【解決手段】ステップS56において、地図情報に基づいて、車両の走行可能範囲内にある充電スタンドが検索される。ステップS57において、各充電スタンドに備えられている充電装置の使用の有無、および、使用中の充電装置の充電終了予定時刻を含む充電スタンド情報を受信したと判定された場合、ステップS58において、検索された各充電スタンドへの到着予想時刻が演算される。ステップS59において、検索された各充電スタンドについて、充電装置の使用の有無および使用中の充電装置の充電終了予定時刻、並びに、充電スタンドへの到着予想時刻に基づいて、充電完了予想時刻が演算される。ステップS61において、充電完了予想時刻に基づいて、充電スタンドの位置を区別して表示される。本発明は、例えば、カーナビゲーション装置に適用できる。
(もっと読む)
エコ運転支援装置
【課題】 車両のエネルギー状態に応じたエコ運転の走行アドバイスが可能なエコ運転支援装置を提供する。
【解決手段】 車両で発生する車両パワーを算出するHV制御部21と、電気負荷の利用状況を検出するパワーマネジメントECU60と、算出された車両パワーに基づいて、車両の運転状態のエコ度合いを表すエコ運転状態量を算出する手段と、算出された車両パワーと検出された電気負荷の利用状況とに基づいて車両の運転状態がエコ運転状態にあると判定するためのしきい値を設定する手段と、算出されたエコ運転状態量が設定されたしきい値以上であることを判定する手段と、判定結果に基づいて、現在の車両パワーがしきい値以上か否かを乗員に報知する手段として機能するエコ判断部22を備えている。
(もっと読む)
経路案内装置、経路案内方法及びコンピュータプログラム
【課題】エンジンを駆動することなくモータ駆動走行のみによって車両が出発地から目的地まで走行可能な経路を案内する経路案内装置、経路案内方法及びコンピュータプログラムを提供する。
【解決手段】車両2の出発地から目的地までの走行予定経路を設定する際に、モータ駆動走行(EV走行)のみによって車両2が出発地から目的地まで走行可能な経路を探索する(S3)。具体的には、リンク走行時の車両2の駆動力が常に所定の閾値以下となると推定されるリンクのみから構成されるとともに、車両2がEV走行のみで目的地まで走行する間にバッテリ7のSOC値が所定値以下とならない経路であり、該当する経路が探索できた場合には、その経路を走行予定経路に設定する経路の候補として案内する(S9)ように構成する。
(もっと読む)
走行案内装置、走行案内方法及びコンピュータプログラム
【課題】表示装置に表示された地図の表示エリア内に含まれない走行可能範囲の境界の位置をユーザに容易に把握させることを可能とした走行案内装置、走行案内方法及びコンピュータプログラムを提供する。
【解決手段】車両2の現在のバッテリ7のSOC値を取得し、取得されたバッテリのSOC値の他、地図情報及び車両2の学習データに基づいて、車両2がEV走行によって走行可能な走行可能範囲の境界を算出する。そして、算出された走行可能範囲の境界の内、液晶ディスプレイ15に表示された地図の表示エリアに含まれない非表示境界がある場合に、非表示境界の位置を特定する境界特定情報(枠やカーソル等のマーク、文字、記号等)を液晶ディスプレイ15に表示するように構成する。
(もっと読む)
電動車両のバッテリ充電制御装置
【課題】予め定められた下限残容量までバッテリの電力を効率よく使用して充電拠点に到達する。
【解決手段】バッテリ充電制御装置は、発電モータ2を制御する発電電力制御部と、発電モータ2が発電した電力で充電可能なバッテリ4と、バッテリ4の残容量を検出する残容量検出部と、バッテリ4の電力を用いて駆動する車両の駆動輪6a、6bに接続された駆動モータ3と、バッテリ4の目標残容量を設定する目標残容量設定部と、車両が現在地から充電拠点まで走行する為に必要なエネルギを推定する必要エネルギ推定部とを備える。目標残容量設定部が、予め定められたバッテリ4の下限残容量に必要エネルギ推定部によって推定された必要エネルギに相当するバッテリ残容量を加算して目標残容量を設定し、発電電力制御部が、残容量検出部によって検出されたバッテリ4の残容量が目標残容量となるように発電モータ2を制御する。
(もっと読む)
車載用表示制御装置、車載用表示制御方法および車載用表示制御プログラム
【課題】走行可能範囲画像と現在位置画像とを明確に識別することが困難であった。
【解決手段】自車両の現在位置を示す情報を取得し、前記自車両に搭載された充電池の残電力量で前記自車両を走行させることが可能な走行可能範囲を取得し、表示部に地図を表示させるとともに、前記自車両の現在位置を示す現在位置画像と前記走行可能範囲を示す走行可能範囲画像とを前記地図上に表示させ、前記現在位置画像の大きさと前記走行可能範囲画像の大きさとを比較し、比較の結果に基づいて、前記自車両の現在位置と前記走行可能範囲とを前記表示部において識別可能な表示方法を選択する。
(もっと読む)
101 - 120 / 224
[ Back to top ]