
Fターム[2F129EE95]の内容
航行(Navigation) (246,646) | 出力/表示 (50,983) | 出力/表示の対象 (25,611) | 危険回避 (804)
Fターム[2F129EE95]に分類される特許
41 - 60 / 804
走行制御装置
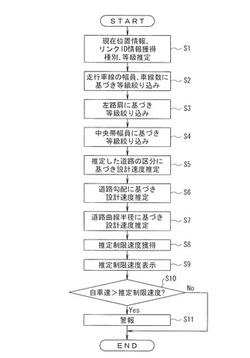
【課題】自車走行路の制限速度を的確に推定する。
【解決手段】フロントカメラ4およびリアカメラ5による撮像画像情報を画像処理し、走行車線の幅員、走行車線の左右の区画線の線種、左側の歩道と車道外側線部間(路肩)の幅員、中央帯の幅員などを検出する。これら情報とナビゲーション装置2からの道路種別情報とから自車走行路の“道路の区分”を予測し、この“道路の区分”に対して予め規定されている設計速度を推定する(ステップS1〜S5)。さらに、ナビゲーション装置2から道路勾配および道路曲線半径情報を獲得し、自車走行路の道路勾配および道路曲線半径に対して予め規定されている設計速度を推定する(ステップS6、S7)。そして、“道路の区分”および道路勾配、道路曲線半径に基づき推定した設計速度から自車走行路の設計速度を推定し、これを自車走行路の推定制限速度とする(ステップS8)。
(もっと読む)
目標物報知装置及びプログラム

【課題】目標物の存在位置等の情報をより適切・確実に伝えることができる目標物報知装置を提供する。
【解決手段】自車の位置を検出するGPS受信機と、目標物の位置情報を記憶するデータベースと、道路地図情報を記憶する地図データベースと、GPS受信機で検出された位置情報と、データベースに格納された目標物の位置情報とに基づき、表示対象の目標物を抽出するとともに、自車の周囲の地図データを抽出し、各アイコンを表示するメイン表示画面の下に、地図データに基づく地図画面を重ねて配置し、その地図画面上の各アイコンを表示する制御部を備えた。
(もっと読む)
津波避難ナビゲーションシステム、その方法及びプログラム
【課題】地震が起きてから津波が来るまでの時間に、各人について必要な情報を取得して解析し、精細なデジタル標高データを利用したきめ細かな避難案内を行なうこと。
【解決手段】津波からの避難方法を提示するための津波避難ナビゲーションシステムであって、避難すべきユーザの現在位置を少なくとも取得するユーザ情報取得手段と、到来する津波の高さおよび到達時刻に関する津波情報を取得する津波情報取得手段と、前記ユーザの周囲の地図を表わした地図データと該地図上の地点の標高データとを取得する地図標高データ取得手段と、前記津波情報と前記地図標高データと前記位置情報とを用いて、避難場所および避難ルートを決定する決定手段と、決定した避難場所および避難ルートを提示する提示手段と、を備えたことを特徴とする。
(もっと読む)
歩行者端末装置、コンピュータプログラム、及び、情報報知方法
【課題】歩行者にとって有用となる情報を出力することができ、歩行者に安全歩行させる。
【解決手段】歩行位置及びその周囲の道路地図を表示可能である歩行者端末装置1である。この装置1は、歩行者の進行方向前方の交差点に設置されている、当該進行方向延長上にある第1横断歩道41用の第1歩行者用信号機51と、当該進行方向に交差する方向にある第2横断歩道42用の第2歩行者用信号機52との、灯色の表示時間に関する信号情報を取得する。また、歩行者の歩行状態を示す歩行情報を取得する。そして、歩行情報取得部27によって取得された歩行情報に応じて、第1歩行者用信号機51と第2歩行者用信号機52とのうちのどちらの信号情報を、歩行者に対して優先的にディスプレイ7aによって出力させるかについて決定する。
(もっと読む)
運転支援システム、情報生成方法、運転支援プログラム、及び生成プログラム
【課題】車両の現在位置に適した交通監視情報を運転者に提供することによって、運転者の運転を支援する運転支援システム等を提供する。
【解決手段】運転支援システムは、区画領域の位置を特定することが可能な第一DB、及び、各都道府県警察署から公表される、監視活動に関する情報を格納した第三DBを参照する。運転支援システムは、自車両が位置する区画領域を、自車両位置に基づいて第一DBを参照することによって特定する。運転支援システムは、自車両位置の近くで実施されている監視活動に関する情報を、第三DBを参照することによって特定する。自車両位置は、地図画像に重ねてメイン表示領域21に表示する。特定した区画領域は、第一サブ表示領域22に表示する。特定された監視活動に関する情報は、第二サブ表示領域23にスクロール表示する。
(もっと読む)
車載ナビゲーション装置
【課題】危険を回避するような経路誘導を行う車載ナビゲーション装置の提供を目的とする。
【解決手段】本発明に関するナビゲーション装置は、安全走行補助データに含まれる危険エリアの情報に基づいて、自車の現在位置が危険エリア内にある場合には危険エリア外へ誘導する経路を探索し、危険エリア外にある場合には危険エリアを回避する経路を探索する経路探索部22と、経路探索部22における探索結果に基づいて自車を誘導する誘導部とを備え、誘導部は、経路探索部22において経路が探索できた場合、当該経路に自車を誘導し、経路探索部22において経路が探索できない場合、危険エリアが回避できない旨を報知する。
(もっと読む)
歩行者端末装置、コンピュータプログラム、及び、歩行経路の検索方法
【課題】車道を横断して反対側の歩道へとスムーズに歩行者を進ませる歩行経路を検索する。
【解決手段】歩行経路を検索すると共に検索した歩行経路を歩行者Hに報知する歩行者端末装置1である。この装置1は、歩行者Hが歩行している歩道31の進行方向前方に設置されている交通信号機13の灯色の表示時間に関する信号情報を取得する。そして、車道32を横断して反対側の歩道33へと進むために要するコストが最小となる歩行経路を決定する。歩行者が歩行している歩道31に平行である車道32を横断して反対側の歩道33へと進む歩行経路が少なくとも二つ存在している場合に、取得した前記信号情報に基づいて歩行経路を決定する。
(もっと読む)
システム及びプログラム
【課題】 警報対象の存在を報知した場合に、ユーザがそれを見落とすことなく知ることができるシステムを提供すること
【解決手段】 警報報知する手段として、表示部5に加えてカラーLED22を光源とする発光部を設ける。制御部18は、条件を満たした場合に、LEDを光源とする発光部の発光状態を制御して警報報知をする。このとき、発光状態の制御は、警報条件を満たした警報対象に対応した発光色で発光する。
(もっと読む)
歩行経路案内装置及びシステム
【課題】車両の走行情報に基づいて障害物の有無を判定し、歩行者に対して、歩行可能な適切な歩行経路を案内することのできる歩行経路案内装置及びシステムを提供する。
【解決手段】地図情報に基づいて歩行者の歩行経路を案内する歩行経路案内装置16において、前記地図情報を記憶する地図情報記憶手段42と、車両の走行情報を取得する走行情報取得手段43と、前記地図情報及び前記走行情報に基づき、前記車両が走行する車道に隣接する歩行者用道路に、前記歩行者の歩行を妨げる障害物が有るか否かを判定する障害物有無判定手段38と、前記地図情報を編集し、前記障害物が有ると判定された前記歩行者用道路を前記歩行経路の探索の対象から除外する地図情報編集手段40と、を備え、編集された前記地図情報に基づき、前記歩行者の前記歩行経路を案内する。
(もっと読む)
誘導機能付杖
【課題】 杖の利用者或いは利用者の動作を援助する同伴者に、目的地までの歩行情報を提供する歩行誘導機能を備えた誘導機能付杖を提供する。
【解決手段】 利用者或いは同伴者が、杖1の保持部2にある方向選択釦3a、3b、3cで選択した方向の宇宙衛星の地図情報Gが地図情報記録回路6に記録され、マイク8による音声信号は追加情報や援助情報として地図情報記録回路6に記録され、これらの記録情報は随時モニタ10で画像情報として、イヤホーン9で音声情報として取得でき、車輪4によりモニタ10に歩行距離が表示され、安全で効率的に短時間で目的地まで歩行可能になる。
(もっと読む)
移動体位置検出装置
【課題】マップマッチングによる移動体の現在位置の測位を、車両の進行方向を加味しつつ簡便かつ精度よく行えるようにする。
【解決手段】移動体としての車両Vに、道路周辺の物体を検出する物体検出センサ1が設けられる。車両Vの現在位置の測位に先立って、物体検出センサ1によって検出された所定の固定物についての検出データと地図データとをマッチングさせることにより、車両Vの進行方向の補正が行なわれる。補正された後の車両Vの進行方向に基づいて、移動体の現在位置の測位のためのマッチングが行われる。
(もっと読む)
システム及びプログラム
【課題】面白味があり、ユーザの注意を得やすく、親しみやすくなるシステム。
【解決手段】 警報対象の位置情報を記憶するデータベースから取得した当該警報対象の位置情報で特定される位置と、取得した車両の現在位置とが所定の接近関係を有する場合に表示部5のメイン表示領域R1に所定の警報を表示する制御部を備えたシステムである。所定の警報は、警報対象と関係のないキャラクタ300をアニメーション表示するようにした。
(もっと読む)
移動体位置検出装置
【課題】移動体の進行方向を、簡便な手法によって精度よく検出することができるようにする。
【解決手段】物体検出センサ1によって、移動体としての車両V周囲の物体が検出される。GPS3によって、誤差を含んだおおまかな車両Vの位置、方位が測位される。地図データ4と物体検出センサ1で検出された検出データとを、直交座標系を用いてマッチングさせて、車両Vの現在位置の測位が行われる。車両Vの位置を原点とする極座標系を用いて、地図データと検出データとをマッチングさせて、車両Vの進行方向が決定される。
(もっと読む)
移動体位置検出装置
【課題】マップマッチングによる移動体の現在位置の測位を、車両のロールあるいはピッチングを加味しつつ簡便かつ精度よく行えるようにする。
【解決手段】移動体としての車両Vに、道路周辺の物体を検出する物体検出センサ1が設けられる。車両Vの現在位置の測位に先立って、物体検出センサ1によって検出された垂直線分を有する固定物を利用して、車両Vのロール角が検出される。また、水平線分を有する固定物を利用して、車両Vのピッチング角が検出される。物体検出センサ1で検出された固定物の位置情報が、決定されたロール角とピッチング角とに基づいて、車両Vが水平状態にあるときの位置情報に変換される(補正)。
(もっと読む)
走行支援情報提供装置
【課題】運転者にとって好適な態様によって報知対象路面を報知することが可能な高精度で信頼性の高い走行支援情報提供装置の提供。
【解決手段】報知対象路面から所定の範囲内に車両が進入すると、車線情報提供手段79によって提供された現在の走行車線IDと記録媒体72に記録された報知対象の走行車線IDとが一致するか否かを判定する。報知手段71は、現在の走行車線IDと報知対象の走行車線IDとが一致しない場合には、第1の報知態様によって報知対象路面を報知し、これら2つの走行車線IDが一致する場合には、第2の報知態様によって報知対象路面を報知する。
(もっと読む)
走行支援情報提供装置
【課題】報知対象路面を運転者に報知して注意を促す必要があるか否かを高精度で判定することが可能な信頼性の高い走行支援情報提供装置の提供。
【解決手段】報知対象路面から所定の範囲内に車両が進入すると、経路予測手段76は、報知対象路面までの車両の走行経路を予測し、予想走行方向演算手段77は、予測された走行経路に従って車両が報知対象路面を通過した場合の予想走行方向角を演算し、走行方向判定手段78は、演算された予想走行方向角と報知対象路面の位置情報に対応する走行方向角との差が所定範囲内であるか否かを判定する。予想走行方向角と走行方向角との差が所定範囲内であると判定されると、報知手段71は、報知対象路面を車両の運転者に報知する。
(もっと読む)
段差警報システム
【課題】段差検知センサーや車高センサーなどを不要にして低コスト化を図るとともに、ドライバーの段差の見落としをサポートできる段差警報システムを提供する。
【解決手段】歩道に設けられ該歩道を挟んで車道と該歩道外の敷地との間を自車両が出入りするための出入り口が前記歩道に設けられ、前記出入り口の両側に位置する前記歩道と車道との境の部分に存在する段差を自車両が通過すると判断された場合に警報する段差警報システムにおいて、自車両の現在位置データと道路データに基づいて自車両10が出入り口に向け走行する経路上で自車両10が段差20に気付かずに段差20を通過するか否かを判定し、段差20を通過すると判定した場合に段差20の高さデータと自車両10の地上高データとを比較して段差20の高さが自車両10の最低の地上高以上か否かを判定し、段差20の高さが最低の地上高以上であると判定された場合に警報を発する。
(もっと読む)
カーナビゲーション装置、カーナビゲーションシステムおよびプログラム
【課題】ドライバの訪問等が望ましくない有害地にドライバが訪問等することを抑制する。
【解決手段】有害地接近抑止機能が解除されない場合には、自車位置の周辺のリンクやノードの情報、POIデータに付加された有害地情報が検出されると、自車位置と、自車位置の周辺の地図と、検出された有害地情報の内容に応じた注意喚起を行う表示とを重畳的にディスプレイ117に表示する処理を行うように構成した。これにより、たとえば、車両のドライバが未成年者である場合、未成年者の訪問等が望ましくない有害地に未成年者が訪問等することを抑制できる。
(もっと読む)
運転支援装置
【課題】運転支援装置において他車両が走行する走行レーンの識別精度を高め、運転操作を支援する制御の信頼性を向上させる。
【解決手段】自車両が走行する道路の車線幅を取得する車線幅取得手段1と、自車両の周囲を走行する他車両の位置を取得する他車両位置取得手段3とを設ける。また、車線幅取得手段1で取得された車線幅と他車両位置取得手段3で取得された位置に基づき、他車両の走行レーンを識別する識別手段5を設ける。さらに、他車両の走行レーンが自車両の走行レーンに隣接するときに、自車両と他車両との接触を回避するための支援制御を実施する制御手段6を設ける。
(もっと読む)
測位デバイス配置指定装置、測位システム
【課題】測位対象物が障害物のどちら側に存在するかを判定することができるように、測位デバイスの配置を指定する技術を提供する。
【解決手段】本発明に係る測位デバイス配置指定装置は、障害物の両側にともに測位デバイスが配置されるように、配置位置を算出する。
(もっと読む)
41 - 60 / 804
[ Back to top ]