
Fターム[2F129FF13]の内容
航行(Navigation) (246,646) | 通信技術の利用 (43,197) | ネットワーク (17,095) | 無線 (14,729) | 他車 (360)
Fターム[2F129FF13]に分類される特許
1 - 20 / 360
電子機器及びプログラム
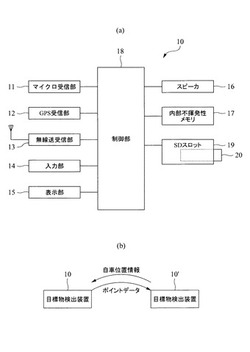
【課題】 新規な目標物であっても、最初の一回目から位置情報に基づいて警報をすることができるようにすること
【解決手段】 自車の位置を検出するGPS受信部12と、自己が収集した警報対象を特定するポイントの位置情報を含むポイントデータを記憶する内部不揮発性メモリ17と、他の目標物検出装置から送られてきた警報対象を特定するポイントの位置情報を受信するとその受信した位置情報を含むポイントデータを内部不揮発性メモリに登録する制御部18とを備え、制御部は、現在位置と内部不揮発性メモリに登録されたポイントの位置情報とが設定された位置関係にある場合に警報を発する。周囲に、他の目標物検出装置が存在する場合、制御部は、内部不揮発性メモリに格納された一部または全部のポイントデータに含まれるポイントの位置情報を送信する。
(もっと読む)
運転支援装置、および、運転支援システム

【課題】車両を案内する方向を地図データベースを備えることなく提示する。
【解決手段】運転支援装置11は、他車両から送信された現在位置情報および現在高度情報を情報受信処理部22によって受信し、他車両の現在位置における高度を高度特定処理部23によって特定し、高度記憶処理部24によって、特定した高度を現在位置に対応付けて記憶し、記憶した位置および高度に基づいて自車両を案内する案内方向を案内方向特定処理部25によって特定し、特定した案内方向を案内方向提示処理部26によって提示する。
(もっと読む)
追従走行制御装置及び追従走行制御システム
【課題】車車間通信で得られる情報を用いて追従走行制御を行うものにおいて、追従対象の車両との車間距離を十分に小さくすることを可能にする。
【解決手段】車車間通信によって周辺車両の情報を取得するとともに、追従対象車から車車間通信によって取得した情報を用いて、当該追従対象車に対して追従走行制御を行う。また、同一進行方向の車線が複数存在する道路に自車及び追従対象車が位置する場合に、自車と同一進行方向且つ別車線に位置する追従対象車に対して、当該追従対象車と同一進行方向且つ別車線を走行しながらも追従走行制御を行う。
(もっと読む)
位置検出システム、端末装置及び位置検出プログラム
【課題】付近にある他の端末装置等で検出した位置を用いて位置検出を行うことができ、位置検出の確度を向上させることができる位置検出システム等を提供すること。
【解決手段】リクエスト側のユーザ端末装置10の情報送受信部41は、近くのユーザ端末装置10に対して、位置情報とGPSの電波強度の送信を求める。他のユーザ端末装置10の情報送受信部41は、各々のGPS受信部16からの位置情報と電波強度を、送信を求めたユーザ端末装置10宛に送信する。これを受信したユーザ端末装置10の座標算出部45は、受信した位置情報と電波強度及び近距離通信電波強度検知部42が検知した近距離無線通信の電波強度等に応じて、当該ユーザ端末装置10の位置を算出する。
(もっと読む)
車両用無線通信装置及び通信システム
【課題】車車間通信で送受信する情報通信量を抑えながらも、情報の受信側において、複数の位置情報からなる走行軌跡情報を受信した場合と同様に自他車両の相対位置関係を把握することを可能にする。
【解決手段】自車両の走行軌跡と先行車両の走行軌跡とが近似していると制御部12で判定した場合に、自車両の走行軌跡情報の代わりに、当該先行車両を特定可能な機器IDと最新の位置情報とからなる省略情報を、無線通信装置1から一定の送信周期で送信するように変更する。
(もっと読む)
ナビゲーションシステム、ナビゲーション装置、およびナビゲーションシステムの動作方法
【課題】後続車両においてユーザーに伝える情報の精度を向上させることが可能な技術を提供する。
【解決手段】ナビゲーションシステムは、車線を走行する情報提供車両ANの走行履歴情報TRKNに基づいて第1渋滞開始地点(第1渋滞終了地点)を検出可能であり、情報提供車両ANのあとを走行する情報提供車両AN+1の走行履歴情報TRKN+1に基づいて第2渋滞開始地点(第2渋滞終了地点)を検出可能な渋滞地点検出部と、第1渋滞開始地点と第2渋滞開始地点とを用いて渋滞開始地点の変化量を算出し、当該変化量に基づいて、第2渋滞開始地点よりも時間的に後の渋滞開始地点を予測した予測渋滞開始地点を取得する渋滞状況予測部と、情報提供車両AN+1の後続車両において、予測渋滞開始地点(予測渋滞終了地点)を用いて情報の提供を行う情報提供手段とを備える。
(もっと読む)
車両用無線通信装置および通信システム
【課題】車車間通信によって情報を送信する場合に、輻輳を抑えながらも、情報を必要に応じた頻度で送信することを可能にする。
【解決手段】自車両の直近の後続車両に搭載される無線通信装置1から受信したセンサ状態情報が、「搭載有」且つ「検出成功」の場合には、自装置から情報を送信する送信周期を基準間隔よりも長くする一方、当該センサ状態情報が「搭載無」や「搭載有」且つ「検出失敗」の場合には、送信周期を基準間隔とするように制御部12で送信周期を制御する。
(もっと読む)
運転支援装置
【課題】車線変更を考慮した適切な走行ができるように運転を支援する。
【解決手段】自車両が走行する道路の車線変更規制区間の情報を含む道路情報を取得する道路情報取得手段14と、道路情報取得手段14により取得された車線変更規制区間の情報に基づいて、自車両の走行地点の前方所定距離内に車線変更規制区間の起点又は終点が存在するか否かの判定を行う判定手段20eと、判定手段20eにより起点又は終点が存在すると判定されたら起点又は終点の情報を報知する報知手段17,18とを備える。
(もっと読む)
ツーリング補助システムおよびツーリング補助装置
【課題】ナビゲーション装置を設置する車両を減らし、携帯電話装置による常時通信が必要なく、後続車両に異常が発生した時の先頭車両への通知を迅速にかつ先頭車両の操縦者が気付きやすいようにする。
【解決手段】ツーリングに参加する先頭車両には、ツーリング参加全した他の車両から受信した軌跡データから全車両の各位置を表示するナビゲーション装置33と無線送受信装置を備え、最終車両6にはツーリング参加先頭と最終車両の位置を表示するナビゲーション装置53と緊急通知スイッチ64と無線送受信装置を備え、他の車両4にはナビゲーション装置を無くして緊急通知スイッチ44と無線送受信装置を設けたツーリング補助システム。
(もっと読む)
ナビゲーション管理方法、及びナビゲーション管理装置
【課題】非選択経路の所要時間を高精度に取得する。
【解決手段】出発地点から目的地点までの複数経路に対する各経路の所要時間を管理するナビゲーション管理方法において、前記各経路に予め設定される複数のノードと、経路探索を行ったユーザの移動体とは異なる他の移動体から得られる前記複数のノードの通過時刻とを用いてプローブデータを編集し、前記複数経路のうち前記ユーザが選択した選択経路以外の経路である非選択経路において、該非選択経路に含まれる連続する複数のノードの組と同一の組の前記プローブデータに基づいて、前記プローブデータにおける前記組の中の複数のノードに挟まれる経路に対する前記他の移動体の移動時間を求め、求めた前記他の移動体の移動時間を用いて前記非選択経路における仮想の移動時間を算出する、処理を有する。
(もっと読む)
走行支援システム
【課題】自車両の走破性能を調整して地図上にない走行経路や災害等で不整地となった走行経路の走行を支援する。
【解決手段】他車両1が地図上にない不整地2(走行経路)を走行した際の状況に基づいて自車両3が不整地2を走行できるか否かを判断し、自車両の走破性能で走行が可能であれば自車両3の走破性能を調整して走行を支援する。
(もっと読む)
車両操作診断装置、車両操作診断方法及びコンピュータプログラム
【課題】適切に運転者の車両操作の診断を行うことを可能にした車両操作診断装置、車両操作診断方法及びコンピュータプログラムを提供する。
【解決手段】各車両から走行時の周辺環境を対応づけた走行データを取得し(S12)、走行データDBへと累積的に格納する(S17)。また、車両から走行データが送信された場合には、走行データDBに記憶された走行データの履歴の内、診断対象とする走行データの車両操作が行われた際の周辺環境に対応する走行データの履歴を抽出し(S13)、抽出された走行データと診断対象とする走行データとを比較することにより、運転者の車両操作を診断する(S14、S15)ように構成する。
(もっと読む)
電子機器
【課題】位置情報の算出に要する時間をより効果的に短縮可能な電子機器を提供すること。
【解決手段】衛星運行情報生成部122は、航法衛星から受信した電波信号に基づいて衛星運行情報を生成して記憶部130に記憶する。通信部70は、航法衛星からの電波信号を受信する機能を有し、直接無線通信が可能な距離にある他の電子機器との間で直接無線通信を行う。衛星運行情報受信部22は、通信部70を介して当該他の電子機器から衛星運行情報を受信する。衛星運行情報更新部24は、衛星運行情報受信部22が受信した衛星運行情報と記憶部130に記憶された衛星運行情報とを照合し、照合結果に応じて、衛星運行情報受信部22が受信した衛星運行情報を用いて記憶部130に記憶された衛星運行情報を更新する。位置情報算出部124は、記憶部130に記憶された衛星運行情報に基づいて自己の位置情報を算出する。
(もっと読む)
ナビゲーション装置、制御方法及びプログラム
【課題】実際の道路の状況を反映し、且つ、自車両の位置をユーザに容易に把握させることが可能なナビゲーション装置を提供する。
【解決手段】道路を含む地図データを記憶する記憶部(1)と、自車両の位置を検出する検出部(2)と、記憶部(1)に記憶された地図データと検出部(2)で検出した自車両の位置とを基に、自車両が走行している道路の画像を表示部(4)に表示する制御部(7)と、を有して構成し、制御部(7)は、上方の視点から道路を見た際に上下に重なる位置関係となる道路付近に自車両が到達した場合は、その自車両が走行している道路の画像を、自車両が視認可能な視点から見た道路の画像に切り替えて表示部(4)に表示する。
(もっと読む)
ナビゲーション装置、ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション方法、およびプログラム
【課題】利用者の進行方向の誤りを適切に検出することができるナビゲーション装置、ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明において、端末装置100は、ナビゲーションサーバ200から案内経路を取得し、現在位置を取得し、取得された現在位置が取得された案内経路上の所定地点に到達したかを検出し、当該到達が検出された場合には、当該到達が検出された時からの経過時間、または当該到達が検出された時以降に新たな現在位置が取得された取得回数を計測し、計測されている経過時間が所定時間内である、または計測されている取得回数が所定回数以内である場合には、閾値を低減し、取得された案内経路に含まれる経路のうち、取得された現在位置との距離が当該閾値以下となる経路上に、当該現在位置を補正する。
(もっと読む)
救援システム及び救援指示装置及び救援装置及び対象装置及びコンピュータプログラム及び救援指示方法
【課題】救援サービス提供のコストを下げる。
【解決手段】被救援車14(対象装置、対象移動体)は、バッテリ21(蓄積装置)が蓄積したエネルギーが、目的地までの移動に要するエネルギーに不足する場合に、救援要請信号を送信する。救援サービスセンター1(救援指示装置)は、被救援車14の現在位置と目的地とに基づいて、救援に向かう救援車2(救援装置、救援移動体)と、救援車2が被救援車14に合流する合流地点(ランデブーポイント)とを決定する。救援車2と被救援車14とが合流したのち、被救援車14の目的地へ向かって移動しながら、エネルギーを被救援車14に補給する。
(もっと読む)
ナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、端末装置、ナビゲーション方法、およびプログラム
【課題】利用者を混乱させることのない適切なタイミングで再探索経路を通知することができるナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、端末装置、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明において、ナビゲーションサーバが、経路ネットワーク情報を用いて探索された所定の探索条件を満たす経路が出力部に出力されている端末装置からの再探索要求を受け付けると、予め取得された経路ネットワーク情報および予め取得された交通情報を用いて当該所定の探索条件を満たす経路を再び探索し、探索された再探索経路を端末装置に送信し、端末装置が、ナビゲーションサーバから送信された再探索経路と出力部に出力されている経路との分岐箇所を特定し、特定された分岐箇所に関する所定の出力条件が満たされる場合には再探索経路を出力部に出力させる。
(もっと読む)
ナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、端末装置、ナビゲーション方法、および、プログラム
【課題】出発地と目的地の位置関係及び近傍ノードの位置関係を考慮して、利用される可能性のある適切な経路を探索することができるナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、端末装置、ナビゲーション方法、及びプログラムを提供することを課題とする。
【解決手段】本発明は、出発地から所定範囲内の出発地側ノードと目的地から所定範囲内の目的地側ノードを交通機関ネットワークから抽出し、抽出した出発地側ノードと目的地側ノードが近傍ノードであるか否かを判断し、近傍ノードと判断した出発地側ノードと出発地との間の出発地側経路及び近傍ノードと判断した目的地側ノードと目的地との間の目的地側経路を道路ネットワークを参照して探索し、探索した出発地側経路と目的地側経路及び交通機関ネットワークに基づいて経路探索ネットワークを生成し、生成した経路探索ネットワークに基づいて出発地から目的地までの経路を探索する。
(もっと読む)
通信システム、案内方法及びプログラム
【課題】複数のユーザが待ち合わせる目的地まで各ユーザが到達しやすくなるような案内を行う。
【解決手段】ユーザA及びユーザBは、移動通信端末100A及び移動通信端末100Bを用いて目的地案内の設定を行うと(ステップS101,S103)、案内モードで目的地へ向かって移動する(ステップS107,S108)。ユーザAは目的地に到着すると(ステップS110)、移動通信端末100Aを他者案内支援モードに切り替える(ステップS111)。移動通信端末100Aは、移動通信端末100Bに対してポーリングを行い(ステップS112)、移動通信端末Bがポーリングを検知すると(ステップS113)、両者の間でペアリングが行われる(ステップS115)。これにより、移動通信端末100Bは、案内手段を電子コンパスに切り替える(ステップS116)。
(もっと読む)
位置補正装置および車車間通信システム
【課題】自車両(第1の車両)の周辺の障害物(第2の車両や歩行者)が衛星を用いて得た位置情報を、自車両(第1の車両)が前記障害物から受信する際に、衛星の測位情報に基づく位置ずれを考慮して、自車両(第1の車両)が受信した前記障害物の位置情報の位置の精度を向上する。
【解決手段】位置補正装置3を自車両(第1の車両)が備えることにより、自車両において、周辺の障害物が衛星を用いて得た当該障害物の位置情報を車車間受信機10が受信し、自車両が衛星を用いて得た自車両の位置情報をGPS受信部4が取得する。このとき、いずれの位置情報にも、衛星の測位情報に基づく位置ずれ(誤差)が含まれる。そして、算出部9により、GPS受信部4が取得する位置情報の位置ずれ量を算出し、補正部11により、算出部9が算出した位置ずれ量に基づいて車車間受信機10が受信する位置情報の位置を補正する。
(もっと読む)
1 - 20 / 360
[ Back to top ]