
Fターム[2F129GG01]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448)
Fターム[2F129GG01]の下位に属するFターム
制御・警報の対象となる車両の構成部分 (2,045)
制御・警報発生の検出対象 (1,391)
Fターム[2F129GG01]に分類される特許
1 - 12 / 12
ナビゲーション装置
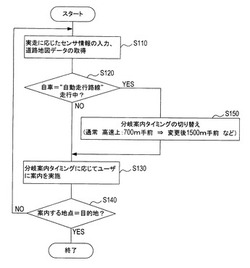
【課題】自動走行路線を自動運転中に自動運転から手動運転への切替を行う場合に、より安全なナビゲーションを実現する。
【解決手段】自車が自動走行路線を走行中であると判断された場合には(S120:YES)、分岐案内タイミングを切り替える(つまり早める)必要があると判断して、分岐案内タイミングを切り替える(S150)。例えば、通常は高速道路上の700m手前で実行するが、変更後は高速道路上の1500m手前で実行するといった具合である。一方、自車が自動走行路線を走行中ではないと判断された場合には(S120:NO)、分岐案内タイミングを切り替える(つまり早める)必要がないと判断する。そして、経路上の進行路選択地点を案内する進行路選択地点案内をその到達前の所定タイミング(分岐案内タイミング)で実行する(S130)。
(もっと読む)
車両用機器の操作装置

【課題】車両走行中の運転者による操作を的確に禁止しつつ他の乗員による操作の利便性を適切に向上させる。
【解決手段】車両用機器の操作装置10は、車両用機器10aを操作する操作部21と、車両の走行中には操作部21の操作を禁止する制御部22とを備え、車両の運転席以外の座席に配置された電磁波発生装置12と、操作部21に接続されて操作部21に照射された電磁波を検出する電磁波検出装置13とを備え、制御部22は、電磁波発生装置12から出力された電磁波が電磁波検出装置13により検出された場合に、操作部21の操作の禁止を解除する。
(もっと読む)
運転診断装置
【課題】例えば、1日毎にドライバの運転診断を行う場合、1日の間に運転を開始して終了するまでが完全に含まれるトリップは問題ないが、2日間に跨って運転が継続するようなトリップのデータに対して、どちらの日のデータとして管理するかといった問題が生じる。このとき、トリップを、3月3日の分と、3月4日の分との2つに分断することは、トリップが一連の運転期間であることから好ましくない。
【解決手段】記憶部13は、3月3日に運転が開始され、3月4日に終了したトリップにおける車両の走行履歴情報(トリップデータ)を、トリップが開始された3月3日のデータとして記憶する。3月3日のデータとしては、既にトリップ1、及び、トリップ2のトリップデータが記憶されているので、そのデータにトリップ3のトリップデータの情報を付加して記憶する。
(もっと読む)
車載装置
【課題】操作キーの操作状況や車両の走行状態に応じて案内音声を適切に出力することにより、操作感を高め、優れた操作性を確保して安全性の向上に寄与する車載装置を提供する。
【解決手段】キー処理部15は、操作支援モード選択時であり、操作間隔時間計測部13による操作間隔時間が所定の時間以内であり、且つキー種別判定部14が同一の操作キー7が連続操作されたと判定した場合に限り、キー操作に対応する処理を行う。音声出力制御部16は、操作支援モード選択部11によって操作支援モードが選択されている場合にのみ、キー操作に対応する案内音声を出力するように制御する。
(もっと読む)
GPS受信データの処理装置、処理方法及びプログラム
【課題】高架道路下などでGPS受信情報の測位遅れが発生した場合、その区間での速度は見かけ上遅くなり、次の区間での速度が見かけ上速くなる。すなわち、位置・時刻のデータに基づき算出した移動体の速度が、当該移動体の当該時刻前後の速度傾向に比べて離れてくる。
【解決手段】算出した速度を当該移動体の速度傾向に合わせるように前記移動体の位置・時刻のデータの時間ずれ補正を行うことにより、測位遅れを補正する。この補正データに基づき、移動体の速度、加速度などを算出する。
(もっと読む)
過重量検出システム
【課題】本発明の課題は、ドライバによって車両の走行性能のチェックが行われたことを証明できる過重量検出システムを提供することである。
【解決手段】前記課題は本発明では、中央電子回路が、質量最大値を超えたことの情報と、手動操作可能な確認応答スイッチの確認応答信号とを記憶するためのメモリを有する構成によって解決される。
(もっと読む)
ナビゲーション装置、車両用安全支援システム、車両位置誤差推定システム
【課題】車両の走行状況に応じて変化する自車位置の誤差量を正確に推定する。
【解決手段】マップマッチ処理部106は、慣性航法処理部102およびGPS処理部103による自車位置の算出結果と、地図データ読出処理部105によりHDD13から読み出された地図データとに基づいて、マップマッチング処理により自車位置を特定する。誤差推定部108は、自車両の走行に応じて所定の割合で誤差量の推定値を増加させ、自車両が特定の地点を通過したときに誤差量の推定値を減少させることにより、自車位置の誤差量を推定する。誤差情報出力部109は、誤差推定部108により推定された自車位置の誤差量に基づいて、自車位置の誤差情報を安全支援装置2へ出力する。
(もっと読む)
ナビゲーション装置、方法及びプログラム
【課題】ドライバーが特定の電装品動作状態を知りたい場合、ドライバーがナビゲーション画面を一瞬見るだけで、知りたい特定の電装品動作状態を容易に認識することができるナビゲーション装置、方法及びプログラムを提供すること。
【解決手段】ナビゲーション画面の道路地図上に自車位置マークを表示するナビゲーション装置において、車載の外装ランプの動作の有無と動作状態を検出する外装ランプ動作検出手段(車両インタフェース部5)と、前記外装ランプ動作検出手段により外装ランプの動作が検出されると、前記自車位置マークに反映させて検出された特定の外装ランプ動作状態を表示する外装ランプ動作情報表示制御手段(図2のステップS1〜ステップS5)と、を備えた。
(もっと読む)
通信装置
【課題】比較的容易に、なおかつ安価に車々間通信で得られる情報の提示を実現することのできる通信装置を提供すること。
【解決手段】VICSで提供されるデータを取り込む取込手段と、車々間通信を行うための送受信部3と、車々間通信の結果得られたデータを、VICSのデータ形式に変換する変換手段と、取り込まれた第1データ、及び変換された第2データのいずれかを選択して、VICSに対応したナビゲーション装置11へ出力する出力手段とを装備する。
(もっと読む)
車載機
【課題】 アプリケーションが外部機器から確実に情報を取得することができる車載機を提供する。
【解決手段】 車載機にはナビ情報プラットフォームマネージャを有したプラットフォーム13が搭載されていると共に、ナビアプリ10、運転技術評価アプリ11、安全運転情報提供アプリ12が搭載されている。ナビ情報プラットフォームマネージャ13a及び車両情報プラットフォームマネージャ13bは、ナビアプリ10、運転技術評価アプリ11、安全運転情報提供アプリ12から情報要求を受けたときは、要求を受付け、要求情報を判定する。判定の結果に応じて対応するAPIをコールし、カーナビゲーション装置15或いは車両制御用ECU18から情報を取得し、アプリからの要求に応答する。これにより、各アプリは、カーナビゲーション装置15或いは車両制御用ECU18の存在を意識することなく情報を取得することができる。
(もっと読む)
車両制御システム
【課題】 本発明は、交差点における円滑で効率的な交通を実現することができる車両制御システムの提供を目的とする。
【解決手段】 本発明は、交差点に進入すべく交差点に接近する車両を検出する車両検出手段と、交差点への各車両の接近態様を少なくとも1つのパラメータとして、該各車両に対して交差点進入に関する優先度を設定する優先度設定手段と、設定した優先度に基づいて、優先度が相対的に高い車両が交差点に優先的に進入できるように、交差点への各車両の接近態様を制御する車両制御手段と、備えることを特徴とする。
(もっと読む)
車載ナビゲーション装置、ナビゲーションシステム及びナビゲーション方法
【課題】各車両毎に固有の特性を反映した最適な走行経路の案内を行えるようにする。
【解決手段】走行中の自車両を制御するための車両制御信号に基づいて自車両が走行している道路の路面状況を検出し、検出した路面状況と、地図データに含まれる地図基本情報や自車両外部の情報サーバ装置から配信される外部情報とに基づいて、自車両が滑る可能性がある他の道路を検出して、走行不可能区間として認識する。
(もっと読む)
1 - 12 / 12
[ Back to top ]