
Fターム[2F129GG06]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報の対象となる車両の構成部分 (2,045) | 操舵機構 (425)
Fターム[2F129GG06]に分類される特許
61 - 80 / 425
船体用制御装置及び船体用制御プログラム並びに船体用制御プログラムを組み込んだ自動操舵装置
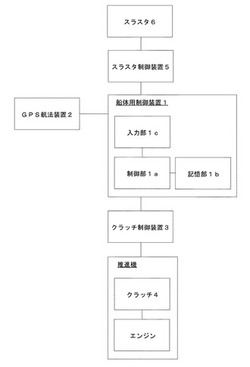
【課題】補助推進装置の設置や舵の制御が不要で、目標位置を設定するだけで目標位置までの経路上に船体を漂流させる船体用制御装置及び船体用制御プログラム並びに船体用制御プログラムを組み込んだ自動操舵装置を提供する。
【解決手段】船体は、船体用制御装置1とGPS航法装置2とクラッチ制御装置3とスラスタ制御装置5とを備える。繰船者が目標位置を設定すると、現在位置から目標位置までの設定経路が算出され、船体と設定経路との離間距離が限界偏位量を超えた場合、クラッチ制御装置3がクラッチ4を嵌めて船体を推進させ、船体が設定経路上に復帰するとクラッチ制御装置3がクラッチ4を脱して船体を停止させる。また、船体はスラスタ6を備えるため、船首方位を設定した方位に保持できる。
(もっと読む)
歩行者検知装置

【課題】車両が右折または左折する場合、当該車両が右折または左折した直後の横断歩道を横断する歩行者を精度よく検知することができる歩行者検知装置を提供する。
【解決手段】本発明の歩行者検知装置は、車両周辺の画像を取得する画像取得手段と、車両が右折または左折することを予測する右左折予測手段と、取得される画像領域内を予め設定された所定の精度で探索する探索範囲均等モードと、画像領域を複数の探索領域に分割し、それぞれ異なる精度で探索する探索範囲偏重モードとのいずれかの探索範囲モードを、右左折予測情報に基づいて設定する探索範囲モード設定手段と、探索範囲モードに基づいて歩行者を探索する歩行者探索手段と、探索結果を通知する結果通知手段とを備え、探索範囲モード設定手段は、車両と、車両が右折または左折する交差点との距離に基づいて、探索範囲モードを設定する。
(もっと読む)
バッテリ交換支援システム、車載装置、バッテリ交換支援装置
【課題】位置合わせのための複雑な構造を必要とせずに、交換可能なバッテリを搭載した電気自動車等の車両を適切な停車位置に容易に停車させる。
【解決手段】支援情報送信装置4は、車両100の車体底部の画像を少なくとも含む撮影画像を床面カメラ41により取得し、その撮影画像に基づいて、車両100におけるバッテリ3の搭載位置を撮影画像内で認識する。そして、取得した撮影画像および認識したバッテリ3の搭載位置に基づいて、バッテリ交換位置201およびバッテリ3の搭載位置をそれぞれ示した支援画像を作成し、その支援画像を表す画像情報をナビゲーション装置1へ送信する。ナビゲーション装置1は、支援情報送信装置4から送信された画像情報を通信装置2を介して受信し、その画像情報に基づいて支援画像を表示する。
(もっと読む)
ナビゲーション装置
【課題】自動走行路線を自動運転中に自動運転から手動運転への切替を行う場合に、より安全なナビゲーションを実現する。
【解決手段】自車が自動走行路線を走行中であると判断された場合には(S120:YES)、分岐案内タイミングを切り替える(つまり早める)必要があると判断して、分岐案内タイミングを切り替える(S150)。例えば、通常は高速道路上の700m手前で実行するが、変更後は高速道路上の1500m手前で実行するといった具合である。一方、自車が自動走行路線を走行中ではないと判断された場合には(S120:NO)、分岐案内タイミングを切り替える(つまり早める)必要がないと判断する。そして、経路上の進行路選択地点を案内する進行路選択地点案内をその到達前の所定タイミング(分岐案内タイミング)で実行する(S130)。
(もっと読む)
車両用表示装置
【課題】車両走行中における安全性が認証されていない非認証アプリケーションプログラムであっても、車両走行中における安全性を確保した上で画面を表示する。
【解決手段】制御部11は、実行するアプリケーションプログラムが所定の認証情報が付与された認証済みアプリケーションプログラムでないと判断した場合、つまり、所定の認証情報が付与されていない非認証アプリケーションプログラムであると判断した場合には、表示器12が当該非認証アプリケーションプログラムに基づく画面表示指令に従って表示する画面の表示方法を、画面の更新間隔を延長する方式または画面の表示領域を縮小する方式のうち少なくとも何れか一方の方式に変更する。
(もっと読む)
マップデータを使用する乗物ESCシステムのための方法及びシステム
【課題】乗物用の改良型電子安定性制御システムを提供する。
【解決手段】乗物用の電子安定性制御(ESC)システムが開示される。電子制御ユニット(ECU)は、乗物のブレーキ及びスロットルの動作に変更を加えることで、意図された乗物方向及び/又はヨーレートと、実際の乗物方向及び/又はヨーレートとの間の差を減少することにより、乗物の横滑りを減少するようにプログラムされる。ESCシステムは、車輪速度センサ、ハンドル位置センサ、ヨーレートセンサ、及び横方向加速度センサから入力を受け取る。又、ESCシステムは、乗物が位置している道路の特性を少なくとも指示する入力も受け取り、乗物が位置する道路は、マップデータベースを使用するポジショニングシステムから決定され、又、特性は、マップデータベースから決定される。
(もっと読む)
道路形状学習装置
【課題】予め記憶されている地図データを実際の道路の形状の即した詳細な地図データとして整備する道路形状学習装置を提供する。
【解決手段】道路形状学習装置は、自車両がカーブを走行したと判定すると、カーブの入口、中央および出口における自車両の位置すなわち入口座標A0、中央座標B0および出口座標C0を、予め設定されている補正値d1およびd2に基づいて、補正後入口座標A1、補正後中央座標B1および補正後出口座標C1を求める。そして、これら補正後入口座標A1、補正後中央座標B1および補正後出口座標C1の3点を通る円弧の半径を算出し、その半径をカーブの曲率半径R1として設定する。
(もっと読む)
操作受付装置、方法およびプログラム
【課題】操作指示の多様性と容易性とを両立させる技術を提供する。
【解決手段】操作受付装置であって、ステアリング操作部に対する接触位置を示す接触位置情報を取得する接触位置情報取得手段と、前記車両が停車中である場合の前記接触位置に対応する第1操作指示を受け付け、前記車両が走行中である場合の前記接触位置の移動方向に対応する第2操作指示を受け付ける受付手段と、を備える。
(もっと読む)
走行支援装置
【課題】状況に応じて演算負荷の低減やドライバーとの協調を適切に行うことが可能な走行支援装置を提供する。
【解決手段】運動量算出部40は、自車周囲の物体mについての総リスク値Rを最小とする目的地への最適経路に自車を誘導する最適運動量算出モード又は総リスク値Rが現在よりも減少する修正経路に自車を誘導するための修正運動量算出モードにより自車の走行を支援する。最適運動量算出モードと修正運動量算出モードとでは、リスクに対して自車を誘導するロジックが異なる。最適運動量算出モードは総リスク値Rを最小とする最適経路に誘導するためドライバーへの負担が少ない。一方、修正運動量算出モードは総リスク値Rが現在より減少する修正経路に誘導するだけの処理なため演算負荷が低減される。そのため、状況に応じて演算負荷の低減やドライバーとの協調を適切に行うことが可能となる。
(もっと読む)
操作受付装置、方法およびプログラム
【課題】走行中に受け付ける操作を、停車中に受け付ける操作よりも簡素化にすることにより、走行中も操作を受付可能とするとともに、運転者が受付可能な操作指示の切り替わりを認識できる技術を提供する。
【解決手段】ステアリング操作部に対する接触位置を示す接触位置情報を取得する接触位置情報取得手段と、車両が停車中である場合に所定の操作についての操作指示の候補である第1選択候補を示す画像を車載表示装置に表示させ、車両が走行中である場合に操作についての操作指示の候補であって第1選択候補と異なる二択の第2選択候補を示す画像を車載表示装置に表示させる表示制御手段と、車両が停車中である場合は接触位置に基づいて第1選択候補から択一される第1操作指示を受け付け、車両が走行中である場合は接触位置に基づいて二択の第2選択候補から択一される第2操作指示を受け付ける受付手段と、を備える。
(もっと読む)
移動軌跡表示装置
【課題】縮尺が小さくても、走行軌跡が見づらくなりにくく、且つ、実際の軌跡も判断しやすい軌跡表示装置を提供する。
【解決手段】表示器10の地図上において、一定間隔軌跡地点Dおよび方向変化地点Eに軌跡図形を表示する。一定間隔軌跡地点Dは、縮尺によって実間隔が定まる一定実間隔毎の地点であるが、その一定実間隔は縮尺が小さいほど長くなる。そのため、縮尺が小さい場合でも、表示器10上において一定間隔軌跡地点に対応する軌跡図形の間隔が狭くなることが抑制される。その結果、縮尺が小さくても走行軌跡は見づらくなりにくい。また、一定間隔軌跡地点Dだけでなく方向変化地点Eにも軌跡図形を表示するので、実際の軌跡も判断しやすい。
(もっと読む)
アイドリングストップ判定装置
【課題】 適切なタイミングでアイドリング運転時間を削減し、燃費を向上させる。
【解決手段】 停止開始条件が成立した時において、過去の走行経路パターン毎の経路確率及び第1停止効果係数に基づいて、過去の走行経路パターン全体としてのエンジン停止効果の度合いを示す第2停止効果係数が求められ、この第2停止効果係数が所定の閾値以上の場合にエンジンを停止すると判定される。このため、通勤経路等の走行頻度の高い走行経路においては、現在の走行経路パターンとほぼ同一の走行経路パターンが過去の走行経路パターンとして燃料損得と共に記憶されている可能性が極めて高いことから、過去の走行経路パターン毎の経路確率及び第1停止効果係数に基づく第2停止効果係数によりエンジンを停止するか否かが判定されるので、GPS装置等の高価な装置を用いることなく、適切なタイミングでアイドリング運転時間を削減し、燃費を向上させることができる。
(もっと読む)
ナビゲーション装置
【課題】ドライバの運転負担を低減することができるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置1は、車両に搭載され、道路情報を利用して目的地へのルートを案内するものであって、車両10のドライバの運転操作を支援する運転操作支援装置6における支援内容及び利用状況の少なくとも一方に応じて、目的地へのルートを検索するECU5を備えている。このようにナビゲーション装置1によれば、運転操作支援装置6の支援内容及び利用状況の少なくとも一方を考慮してルートを検索することができる。
(もっと読む)
走行支援システム及び方法
【課題】変化する道路環境に略リアルタイムに対応して推奨ルート・挙動等を提供する。
【解決手段】クライアントシステム2は、測位部11と、基準情報を格納する基準情報格納部12と、走行履歴取得部13と、挙動履歴取得部14と、画像認識部15と、ルート生成部16と、挙動生成図17とを備え、サーバシステム3は、複数の車両の走行履歴情報を格納する走行履歴データベース21と、複数の車両の挙動履歴情報を格納する挙動履歴データベース22と、複数の車両の画像認識情報を格納する画像認識データベース23と、前記データベース21〜23に格納された情報に基づいて各クライアントシステム2の前記基準情報を更新する更新情報を送信する基準情報更新部24とを備える。
(もっと読む)
ナビゲーションシステム、ナビゲーション装置、及びサーバ装置
【課題】サーバ装置に最適な経路を探索させる場合、車両側のナビゲーション装置は、走行中の自車位置情報を間欠的に通信にて送信するため、各車両におけるナビゲーション装置とサーバ装置との間における通信量は膨大になる。
【解決手段】サーバ装置10は、車両が実際に代表地点間を走行した際の走行時間情報を受信し、その走行時間情報に基づいて、代表地点間の詳細経路情報の送信を要求するかどうかを判定する。車両が実際に代表地点間を走行した際の走行時間が、走行情報データベース14に記憶される所要時間よりも短い場合においては詳細経路情報の送信を要求する信号を車両側のカーナビゲーション装置100に送信し、受信した詳細経路情報に基づいて走行情報データベース14を更新する。
(もっと読む)
車載撮像装置
【課題】撮像手段を車両に搭載した状態のまま、撮像手段の設定を簡単に且つ正確に確認、変更することができる車載撮像装置を提供することを目的とする。
【解決手段】車両に搭載される撮像手段2と、撮像手段2の出力画像信号の処理を行う処理手段15と、車両の機器制御装置からデータ伝送路を介して車両本体の情報を受信する通信手段10とを有し、処理手段15は、撮像手2段の現在の設定が、通信手段10で受信した車両本体の情報に対応しているか否かを判断する車載撮像装置を提供する。
(もっと読む)
ランドマーク識別のための自動標識付け
【課題】画像においてランドマークを識別する方法を提供する。
【解決手段】作業現場の画像を受け取り、この画像において示唆された作業現場の特徴の識別を判定するために画像を分析する。作業現場の特徴の示唆された識別を、通信ユニットを通じて送る。確認された識別を形成するために、作業現場の特徴の示唆された識別を受け取る。確認された識別、およびこの確認された識別と関連のある複数の属性を、データベースに格納する。
(もっと読む)
可搬型ランドマークの配備システムおよび方法
【課題】位置確認およびナビゲーションのために視覚ランドマークを拠り所とする場合が多い移動ロボット・デバイスのための、ランドマーク・コントローラと、ランドマーク配備システムと、複数の可搬型ランドマークとを備えている装置を提供する。
【解決手段】ランドマーク・コントローラは、ランドマーク位置決めおよび配置プロセスを有する。ランドマーク配備システムは、複数の操作コンポーネントを有する。複数の可搬型ランドマークは、作業現場内にある複数の位置に配備されるように構成されている。
(もっと読む)
位置補正装置及び方法、並びに運転支援装置
【課題】自動車等の車両の走行位置を正しい位置に補正する。
【解決手段】位置補正装置(100)は、運転者の減速行動を車両が走行している場所情報と関連づけて学習する学習手段(120)と、学習された減速行動のうち、場所情報が同じであればバラツキが所定の範囲内となる行動を特徴点として抽出する抽出手段(150)と、場所情報が同じである地点を走行する場合に、運転者の特徴点を検出する検出手段(140)と、検出された特徴点及び学習された減速行動から抽出された特徴点を互いに比較することで、車両の位置補正を行う補正手段(160)とを備える。
(もっと読む)
運転支援装置
【課題】車線変更の開始時点を迅速に且つ精度良く推定することができる運転支援装置を提供すること。
【解決手段】運転支援装置1では、車線変更推定部13は、ウィンカーセンサ3によってウィンカーONが検出された第1の時点における曲率変化速度が基準曲率変化速度以上である場合、曲率変化速度が基準曲率変化速度であった第2の時点を車線変更開始時点と推定するため、車線変更開始後にウィンカーが操作された場合であっても、その操作の遅れを考慮して車線変更の開始時点を精度良く推定できる。また、ウィンカーONが検出された時点で既に得られている走行情報により車線変更の開始時点を推定するため、車線変更の開始時点を迅速に推定できる。
(もっと読む)
61 - 80 / 425
[ Back to top ]