
Fターム[2F129GG07]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報の対象となる車両の構成部分 (2,045) | ウインカ (248)
Fターム[2F129GG07]に分類される特許
41 - 60 / 248
車両運転支援装置及び支援方法
【課題】移動体の挙動予測を効率的に行って接触の可能性を迅速に判断し、適切なタイミングで警告情報を提示できるようにする。
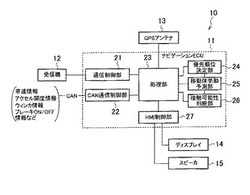
【解決手段】車両に搭載されたカーナビゲーションシステム10のナビゲーションECU11が、第1光ビーコン4から受信した運転支援情報に含まれる交差点構造情報に基づいて、サービス対象交差点における移動体検知エリアを複数のエリアに分割し、CAN経由で取得される車速情報に基づいて、分割した複数のエリアの優先順位を決定する。そして、優先順位の高いエリアから順に当該エリアに存在する歩行者や自転車の挙動を運転支援情報に含まれる移動体状態情報に基づいて予測し、その予測結果とCAN経由で取得される車両情報とに基づいて注意喚起の必要性を判断して、注意喚起の必要性ありと判断した場合に、ディスプレイ14での画面表示やスピーカ15からの音声出力により警告情報を提示する。
(もっと読む)
運転支援装置

【課題】運転者に自身のクセを認識させることができ、さらにはクセの改善を図ることができる運転支援装置を提供する。
【解決手段】制御部は、走行時の自車両の状態を表す車両情報を取得し、この車両情報を予め定められている評価項目について評価することにより、運転者の運転操作の傾向を表す運転特性(クセ)を診断し、このクセを累積的に記憶することでクセの分布のピーク値を含む所定の領域である要アドバイス領域を設定し、今回の診断結果がこの領域II内にある場合、即ち運転操作において改善すべきクセが繰り返し行われた場合には、そのクセを改善するためのアドバイスを報知する。また、運転特性がこの領域IIIにある場合には、運転操作を褒めるアドバイスを報知する。
(もっと読む)
車線区画線検出装置、車線区画線検出方法、及び車線区画線検出プログラム
【課題】ノイズが存在する場合でも、正確に車線区画線を検出することのできる、車線区画線検出装置、車線区画線検出方法、及び車線区画線検出プログラムを提供する。
【解決手段】走行路を走行する走行体から前記走行路を撮像して得られた原画像を取得する、原画像取得手段と、前記原画像に基づいて、前記走行路に含まれる車線区画線の前記走行体からの相対位置を検出する車線区画線位置検出手段と、時刻t0における原画像である第1画像の部分画像と、前記時刻t0よりも過去における前記原画像である過去画像の前記部分画像とに基づいて、車線区画線位置検出手段における検出結果を検定する、検定手段とを具備する。
(もっと読む)
道路情報特定方法、道路情報特定装置、ナビゲーションシステム、道路情報を特定するためのコンピュータプログラム及びそのコンピュータプログラムを記録した記録媒体
【課題】一時停止の中でも、警告が真に必要な一時停止が付された交差点進入道路を特定し、当該進入道路ついての道路情報を自動的に作成する方法及びその装置を提供する。
【解決手段】一時停止情報の付された交差点への進入道路を抽出し、
交差点ごとに当該各進入道路につき、退出道路以外の道路に車輌不在のとき、他の道路(退出道路を含む)から進入する他の車輌の全進路と当該進入道路の車輌の退出進路との交差点における交差の有無を評価し、当該他の車輌の進路と当該進入道路の車輌の進路との交差が認められないとき、該進入道路を特定する。
(もっと読む)
運転支援装置及びプログラム
【課題】交差点の通過に伴う運転動作に関する評価を行う運転支援装置及びプログラムを提供する。
【解決手段】運転支援装置は、交差点に進入する前に走行した進入車線を特定し、進入車線に対応づけられる交差点を退出した後に走行すべき走行予定道路を特定する。また、交差点を退出後に走行した退出道路を特定し、退出道路と走行予定道路とが一致しない場合(S206:NO)、交差点に進入する進入動作を危険動作であると判定する(S207)。これにより、退出道路と走行予定道路とが一致しない場合、交差点に進入する進入動作を危険動作と判定するので、交差点の通過に伴う運転動作を適切に評価することができる。
(もっと読む)
発呼タイミング制御装置および発呼タイミング制御方法
【課題】 複数のドライバから情報提供の要求があった場合に、ドライバの応答を得ることができる適切なタイミングで発呼できる発呼タイミング制御装置を提供する。
【解決手段】 発呼タイミング制御装置10は、車両に搭載された車載装置50から、ドライバのワークロードに関するデータと車両の現在位置のデータを受信するデータ受信部11と、現在位置のデータと道路地図のデータとに基づいて車両が走行中の道路および進行方向を求め、車両の進行方向の道路区間における過去のワークロードの値に基づいて、ワークロードの変化を予測するワークロード予測部12と、情報を通知すべき車両が複数存在する場合に、ワークロードの低負荷期間に発呼し、かつ、複数の車両への発呼および情報の通知が最も早く終了するように、各車載装置への発呼タイミングを決定するスケジューリング部13と、発呼タイミングであることを出力するタイミング出力部14とを備える。
(もっと読む)
画像生成装置及び画像表示システム
【課題】車両と物体との位置関係を直感的に把握できる技術を提供する。
【解決手段】画像表示システムでは、ドライバに提供される表示用画像において、方向指示器で指示された方向の車両9の側方領域が大きく示される。このため、車両9と接触する可能性のある物体を容易に発見でき、接触事故を有効に防止できる。この場合において、車両9の後方位置から前方に向けた仮想視点からみた合成画像FP2が表示されるため、ドライバ自身の視野の向きと同じ視野の向きで車両9の側方領域が示される。このことから、ドライバは頭の中で座標変換を行うなどの複雑な判断を伴うことなく、車両9と物体との位置関係を直感的に把握できる。
(もっと読む)
走行支援装置
【課題】 ナビゲーション装置で得られた情報から判定された道路種別に対して、その道路種別に応じた適正な走行支援を行うことができる走行支援装置を提供する。
【解決手段】 本発明の走行支援ECU1における走行道路種別判定部10では、ナビゲーション情報に基づいて判断した自車両の走行路の道路種別であるナビ情報道路種別に応じたナビ道路種別信号を生成する。走行支援抑制部12では、走行道路種別判定部10から出力されたナビ道路種別信号や各種信号に基づいて、走行支援の抑制を判断する。支援内容決定部11では、自車両に対する支援内容を決定する。また、支援内容決定部11は、走行支援抑制部12から支援抑制信号が出力された際、ナビゲーション情報の利用を中止するとともに、走行支援を抑制する。支援内容実行部13では、支援内容決定部11より出力された支援内容信号に応じた走行支援を行う。
(もっと読む)
ナビゲーション装置
【課題】原動機付自転車に特有の通行規制である二段階右折の案内をユーザに提供することができる「ナビゲーション装置」を提供すること。
【解決手段】
交通案内情報を少なくとも画像又は音声で出力する情報出力手段と、所定の車両が二段階右折をするように規定されている交差点に車両が到達したと判定したときに(S14)、二段階右折が必要である旨の案内を情報出力手段を介して行う(S15)制御手段とを有する。制御手段は、車両の種類に応じて二段階右折が必要である旨の案内の内容を変更する。
(もっと読む)
ナビゲーション装置における逆走検出方法
【課題】新たに専用の逆走検出データを整備することなく、既存の地図データベースの範囲内で逆走検出を実現する。
【解決手段】地図データ入力部1から入力された地図データベースに基づいて、表示装置6に描かれた道路上に、位置検出器8、9、10、及び11で検出され制御回路4のマップマッチング処理にて演算された自車の位置を表示するナビゲーション装置において、自車位置と周辺リンクの重なり判定をステップS32で行い、重ならない場合は、マップマッチング処理を終了し、重なる場合は、直ちにリンク上に前記自車の位置を合わせこむマップマッチング処理を行ってから、このリンクの情報を活用し、該リンクの向きと自車の走行方向との一致不一致を判定する。そして、不一致の場合は、逆走と決定する。
(もっと読む)
ナビゲーション装置、表示制御方法、表示制御プログラムおよび記録媒体
【課題】移動体が特定地点で進路変更すると判断された場合、移動体の現在地点周辺の地図データを縮尺変更して表示する。
【解決手段】位置取得部102によって移動体の現在地点の位置情報を取得し、経路設定部103によって目的地点までの経路が設定されているか否かを判断する。目的地点までの経路が設定されていない場合、表示制御部110によって、表示部101を制御して、移動体の現在地点周辺の地図データを表示する。そして、判断部106によって移動体が特定地点で進路変更すると判断された場合、表示制御部110によって、表示部101を制御して、移動体の現在地点周辺の地図データを縮尺変更して表示する。
(もっと読む)
運転支援装置及び方法
【課題】矢灯器付き信号機の一信号サイクル内に通過可と認識される矢灯器と通過不可と認識される矢灯器とが点灯される場合に、実際の通過不可能な時間をより正確に判定することが可能な運転支援装置を提供する。
【解決手段】信号通過可否判定部7は、信号機情報に基づいて交通信号機11が信号の1サイクルに通過可能と認識される矢灯器と通過不可能と認識される矢灯器とを点灯すると判断されたときは、通過可能な矢灯器と通過不可能な矢灯器との1サイクルにおける前後関係に基づいて交通信号機11の通過不可能な時間を判定する。これにより、矢灯器付き信号機の一信号サイクル内に通過可と認識される矢灯器と通過不可と認識される矢灯器とが点灯される場合であっても、実際の通過不可能な時間をより正確に判定することが可能となる。
(もっと読む)
タッチパネル装置および入力方向検知装置
【課題】操作者の存在する方向に応じてコンテンツ表示方法を制御することが可能なタッチパネル装置および入力方向検知装置を実現する。
【解決手段】近接・接触検知部11は、タッチパネル10に対する指20の近接および接触によるセンサの出力値の変化を検出し、近接および接触位置を検知する。操作指方向判定部12は、近接・接触検知部11の近接および接触検知情報を基に、指20がタッチパネル10に接触する直前の近接検知情報を用いて指20の到来方向を判定する。コンテンツ変更部13はこの判定結果に応じて、表示部14に表示するコンテンツの内容、画面構成等を制御する。
(もっと読む)
運転操作支援装置、自動車及び運転操作支援方法
【課題】運転者が車線変更を行う際の運転操作支援をより適切に行うこと。
【解決手段】操舵入力を行う操舵入力手段と、操舵入力手段における操舵反力を付与する操舵反力付与手段と、自車両の進路となる道路に関する情報を取得する道路情報取得手段と、自車両の走行状況に関する情報を取得する走行状況取得手段と、道路情報取得手段が取得した情報と、走行状況取得手段が取得した情報とに基づいて、分岐予定である分岐点と自車両との位置関係を検出する走行位置検出手段と、走行位置検出手段が検出した分岐点の位置と、走行状況取得手段が取得した自車両の走行状況に関する情報とに基づいて、分岐点の位置に対する自車両の走行経路の状況に応じた操舵反力付与手段に関する制御量を算出する制御量算出手段と、制御量算出手段によって算出した制御量で、操舵反力付与手段を駆動する駆動手段とを有する自動車とした。
(もっと読む)
運転支援装置
【課題】緊急走行中の緊急車両に対して適切な運転支援を行うことができる運転支援装置を提供することを課題とする。
【解決手段】交差点における信号機の情報を取得する信号機情報取得手段と、車両の交差点における進行方向を検出する進行方向検出手段と、交差点に進入する移動体を検出する移動体検出手段と、車両の交差点における進行方向と交差点に進入する移動体に基づいて、車両と移動体との衝突を防止するための運転支援を行う運転支援手段とを備え、運転支援手段は、車両が交差点に進入するときの信号機の状態が進行不可信号の場合、進行不可信号のときには通常行わない運転支援を行うと決定することを特徴とする。
(もっと読む)
緊急情報処理システム
【課題】車両の運転中に緊急情報を受信した場合に、ドライバーが取るべき運転操作の一部を自動的に行うことにより、緊急時におけるドライバーの負担を軽減して安全性の向上に寄与する緊急情報処理システムを提供する。
【解決手段】緊急情報を受信する緊急情報受信機12と、緊急情報を報知するための表示部16及びスピーカ17と、緊急停車時に自車の周囲に対し警告を与えるための警告器13と、緊急情報受信機12が緊急情報を受信した時、警告器13を動作させる警告器制御部18が設けられている。
(もっと読む)
情報提示システムおよび移動端末
【課題】移動端末の設置自由度の向上を可能としながら、車両情報を車載装置から移動端末へ適切に伝達することができる情報提示システムを提供する。
【解決手段】車載装置と移動端末とを備える情報提示システムであって、車載装置1は、車両情報を取得する車両情報取得手段と、取得された車両情報をデータに変換するデータ変換手段と、データ変換手段により変換されたデータに基づいて音波信号を出力する出力手段50と、を有し、移動端末2は、車載装置1から出力された音波信号を集音する集音手段70と、集音された音波信号からデータを求め、当該データを車両情報に変換する車両情報変換手段と、車両情報変換手段により変換された車両情報に基づく提示情報をユーザに提示する情報提示手段100,110と、を有することを特徴とする情報提示システム。
(もっと読む)
情報提供装置、情報提供方法およびプログラム
【課題】 現在の停車シーンに応じて、適切な情報をドライバーに提供することのできる情報提供装置を提供する。
【解決手段】 情報提供装置1は、車両のドライバーに対して情報を提供するための装置である。車両から取得できる車両情報と地図情報に対応付けて、複数の停車シーンが設定されており、この装置1の停車シーン判定部9では、車両から取得した現在の車両情報と地図情報に基づいて、複数の停車シーンの中から車両の現在の停車シーンの判定が行われ、また、この装置1の提供情報決定部13では、現在の停車シーンに応じて、車両のドライバーに対して提供する情報が決定される。
(もっと読む)
運転支援装置、及びプログラム
【課題】より安全な運転となるようにドライバの運転を支援する。
【解決手段】ドライバが注意すべき物体を検出し(200)、検出された物体の種類を特定し(204、214、218、222)、特定された種類に対応する抽象化された画像が表示されるように表示装置22の表示を制御する(242)。
(もっと読む)
車両の運転支援装置
【課題】旋回時に車両が障害物にどの程度まで接近したのか運転者に容易に確認させ、よって旋回時の運転技能の向上に資することができるようにした車両の運転支援装置を提供する。
【解決手段】車両の後側方を撮像するカメラを備え、車両が旋回するとき、旋回方向内側に存在する障害物までの距離(内輪余裕)を計測し(S104,S120)、計測された距離(内輪余裕)の最小値が所定値以下である場合、撮像された車両の後側方の映像を記憶する(S110からS114,S126からS130)。次いで車両の停止が検知されると共に、運転者の再生操作に応じ、記憶された映像を再生してディスプレイに表示する。
(もっと読む)
41 - 60 / 248
[ Back to top ]