
Fターム[2F129GG07]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報の対象となる車両の構成部分 (2,045) | ウインカ (248)
Fターム[2F129GG07]に分類される特許
61 - 80 / 248
情報提供サーバ、プログラム、および情報処理方法
【課題】情報提供サーバ、プログラム、および情報処理方法を提供する。
【解決手段】車両に搭載される車載器と通信可能な情報提供サーバであって、地図に付加される地図付加情報と、複数の広告情報を含む広告情報群と、所定の広告出力位置を示す位置情報と、を対応付けて記憶する記憶部と、各々対応範囲が異なる通信装置に、前記車載器へ送信させる広告情報群を設定する情報処理部と、前記情報処理部により設定された広告情報群および位置情報を前記通信装置に送信する送信部と、を備え、前記情報処理部は、前記通信装置の対応範囲から離れた地図付加情報に対応付けられている広告情報群を前記記憶部に記憶されている前記広告情報群から間引いて設定を行う、情報提供サーバ。
(もっと読む)
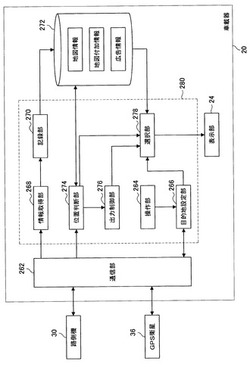
車載装置および情報通知方法

【課題】運転者の安全運転を確保しつつ、運転者に有益な情報のみを通知することを課題とする。
【解決手段】車載装置(20)は、過去に外部から受信した情報について運転者が閲覧した履歴を記憶する履歴DB(21)を有する。このような構成を有する車載装置(20)は、センターから配信された情報を受信し、履歴DB(21)に記憶される履歴に基づいて、受信された情報に対して、運転者に通知する優先度を付与する。そして、車載装置(20)は、センターから情報が受信された場合に、車両の走行状態を検知し、検知された走行状態に適した形式で、優先度が付与された情報のうち、優先度が高い情報から順に運転者に通知する。
(もっと読む)
車両探索システム及び車両探索方法
【課題】自動車がどこに駐車されていても、ユーザーが自分の自動車の場所を探索することを可能にする。
【解決手段】車両(16)の位置を探し出す車両探索システム(10)は、携帯端末機器(14)と車両(16)に搭載された通信装置(12)を有している。携帯端末機器(14)はスクリーン(74)を備えており、地図情報を取り込んで携帯端末機器(14)の現在位置を地図(17)の上に表示する。車両(16)に搭載された通信装置(12)は、車両(16)の現在位置を、携帯端末機器(14)に送信する。携帯端末機器(14)は、車両(16)の位置と携帯端末機器(14)の位置を、地図(17)の上に同時に表示する。
(もっと読む)
車両の視覚支援装置
【課題】車両の走行状態と道路情報を関連づけた情報として蓄積し、乗員が視認したい車両周辺の画像を選択して、表示する車両周辺の視覚支援装置を提供する。
【解決手段】前記車両の周辺を撮像する複数の撮像手段(10)と、道路を走行している前記車両の、少なくとも現在位置および時刻を含む走行状態(31)を検出する走行状態検出手段(30)と、少なくとも前記現在位置近傍を含み、前記車両の走行に関わる前記道路の情報が取得されたもしくは記憶された道路情報確認手段(20)と、前記撮像された画像を選択する画像選択手段(40)と、前記選択された画像を表示する表示手段(50)と、を備え、前記画像選択手段(40)は、前記車両が前記現在位置から前記道路情報確認手段(20)によって前記走行状態(31)の変化が予想される変化予想地点へ移動しようとするときに予想される前記走行状態(31)の変化に応じて画像を自動選択する構成とした。
(もっと読む)
安全走行用の自動支援機器の制御装置
【課題】運転が不慣れな道路の走行時に、ライト、ワイパ、暗視カメラ等の自動支援機器の作動を制御して安全性を高める。
【解決手段】自車位置情報取得部と、既に走行した道路の走行回数を記憶している走行履歴記憶部と、カーナビゲーション装置で入力された目的地に応じて設定された走行経路に含まれる道路区間または走行区域が、運転が不慣れな道路区間または走行区域であるかを、前記走行履歴記憶部を参照して判定する判定部と、前記判定部で運転が不慣れであると判定された場合に、ライト、ワイパおよび暗視カメラのいずれか1つを含む安全走行用の自動支援機器の作動条件の閾値を緩和する閾値に変更し、前記道路区間または走行区域を走行する直前に前記自動支援機器を作動させる機器制御指令形成部と、前記機器制御指令形成部からの機器制御指令を前記自動支援機器へ送る送信部と、を備えていることを特徴とする安全走行用の自動支援機器の制御装置を提供する。
(もっと読む)
運転支援装置、運転支援方法及びプログラム
【課題】追い越し後の状況を考慮した安全な追い越し走行を支援することが可能となる運転支援装置、運転支援方法及びプログラムを提供する。
【解決手段】CPU41は、方向指示スイッチ51から点灯指示信号が入力された際には、追い越しのための車線変更を行った後、更に、自車両が現在走行している走行車線上へ復帰する必要がある場合には、誘導経路上における自車前方の次の進路変更地点に基づいて復帰必要地点を設定する。また、CPU41は、現在の自車位置から追い越し走行後、自車両が進入可能な車両間スペースに復帰する復帰地点を算出し、この復帰地点が復帰必要地点よりも手前でない場合には、追い越し走行後、当該進路変更地点において進路変更を安全に行うことができないと判定する。
(もっと読む)
車両走行支援システム、路上側システム及び車両側システム
【課題】交差点を通行する通行者の条件に一切関係なく当該通行者の存在有無を適切に判定し、通行者への接触を適切に未然に回避する。
【解決手段】路上側システム2は、車両が進入しようとする交差点を路上側に設置されている路上カメラ4a〜4hが撮影し、その撮影範囲内にある通行者の移動履歴と通行者の向きと信号機13a〜13dの信号状況とを解析して通行者の進行方向及び進行速度を表す通行者進行情報を推定して車両側システム3に送信し、車両側システム3は、通行者進行情報と車両の現在位置と車両の進行方向と車速とを解析して車両が通行者に接触する可能性有無を判定して警告を出力させる。
(もっと読む)
移動目的推定装置及び移動目的推定方法
【課題】 習慣性の少ない行動の目的地についても精度よく推定することができる移動目的推定装置を提供する。
【解決手段】 移動目的推定装置は、車内カメラ21によって撮像された自車両内の状況の映像を映像解析認識部33によって認識し、認識した自車両の乗員の装飾状態に基づいて、移動目的推定部45によって当該自車両の移動目的及び移動目的地を推定する。このとき、移動目的推定部45は、人の装飾状態としての着衣、状態、及び装飾品を示す情報と場所とを対応付けて装飾状態・移動目的データベース16に記憶されている情報と、車内カメラ21によって撮像された映像とそのときの移動目的地とを対応付けて装飾状態・移動場所記憶部43に記憶されている情報とを用いて、過去に移動目的地として自車両が到達した場所の中から今回の当該自車両の移動目的及び移動目的地を推定する。
(もっと読む)
ウィンカー制御支援装置、ウィンカー制御支援方法、及び、ウィンカー制御支援プログラム
【課題】車線変更、路肩発進等による操舵角の小さな変化でもウィンカーの自動的な解除に貢献する。
【解決手段】動作中検出手段11aが車両のウィンカーの動作中を検出すると、針路変更完了判定手段11dが進行方向ベクトル検出手段11bによって検出された車両の進行方向ベクトルと道路情報取得手段11cによって取得された、例えば道路の基準線、基準ベクトル等を示す道路情報とを比較し、その比較結果に基づいて車両の針路変更が完了したか否かを判定する。針路変更完了判定手段11dによって針路変更が完了したと判定されると、解除制御手段11eがウィンカーの動作解除を制御する。
(もっと読む)
車載装置
【課題】駐車場などの施設内において、自車両の急発進を抑止する車載装置を提供する。
【解決手段】自車位置検出部11で検出した自車位置と、地図データ記憶部12から、自車両が施設に進入したと判定されると、ナビゲーション装置1はエンジン制御装置3に対して、燃料噴射量の上限を、自車両が急発進しない程度の量である所定の量に制限するよう指示する。指示を受けたエンジン制御装置3は、燃料噴射量の上限を所定の量に設定する。自車両から道路までの距離が所定の距離以下になり、方向指示器4の点滅が行われたことを示す信号が車体制御装置2からナビゲーション装置1へ送信されると、ナビゲーション装置1は、燃料噴射量の制限を解除する。
(もっと読む)
交差点無停止走行制御方法
【課題】交差点無停止走行制御システムの路側システム簡略化方法の提供。
【解決手段】一つの交差点から当該交差点に隣接する複数の交差点を各々青信号・無停止で通過するための走行条件あるいは車両側において走行条件算出に必要な各種情報を一括して周期的に当該交差点を通過する車両に、あるいは、管轄区域内全交差点からそれらに隣接する交差点を青信号無停止で通過するための走行条件あるいは車両側において走行条件算出に必要な各種情報を管轄区内全交差点分一括して周期的に前記管轄区域内を走行する全車両に、通報し、情報を受信した車両は一つの交差点通過毎に自車両が次に通過すべき目標交差点を選択して前記目標交差点を青信号・無停止で通過するに必要な走行条件あるいは走行条件算出に必要な情報を抽出し、前記抽出した走行条件あるいは走行条件算出に必要な情報から算出した走行条件で目標交差点まで走行し目標交差点を青信号・無停止で通過する。
(もっと読む)
ナビゲーション装置、操作部表示方法
【課題】運転者の特性に応じて各運転者の操作性を向上させることができるナビゲーション装置及び操作部表示方法を提供すること。
【解決手段】表示部28に表示された操作部A〜Eの接触位置により操作されるナビゲーション装置100において、走行時の車両操作を検出する車両操作検出手段11、12、13と、車両操作検出手段が検出した車両操作に基づき、運転者操作情報を取得する車両操作取得手段21と、運転者操作情報に基づき運転者の運転者特性を学習する運転者特性学習手段23と、運転者特性学習手段23が学習した学習結果に応じて、操作部A〜Eの表示態様を変更する操作部生成手段24と、を有することを特徴とする。
(もっと読む)
運転評価装置、及び運転評価方法
【課題】交差点で車両を右左折させる際の運転操作を適切に評価する運転評価装置、及び運転評価方法を提供すること。
【解決手段】交差点で車両を右左折させる際の運転操作を評価する運転評価装置10において、車両の走行距離Dの推移とステアリングハンドル又は車輪の操舵角θの推移とを検出し記憶させる検出記憶手段21と、検出記憶手段21により検出し記憶させた走行距離Dの推移と操舵角θの推移とに基づいて交差点への進入地点Qを検出する進入地点検出手段23と、進入地点検出手段23により検出された進入地点Qを考慮して運転操作を評価する運転操作評価手段25と、を備える。
(もっと読む)
運転補助装置
【課題】より安全な走行を実現することができる運転補助装置を提供すること。
【解決手段】本発明による運転補助装置1は、車両の位置を検出する位置検出手段2aと、道路Rと道路Rに付属する所定領域SAと道路Rから所定領域RAに退出する退出路Aと所定領域SAから道路Rに合流する合流路Bを含む地図情報を記憶する記憶手段6と、地図情報と車両の位置に基づいて車両が所定領域SAに位置するか否かを判定する位置判定手段2eと、車両の方向指示器の左右出力を検出する左右出力検出手段2fと、位置判定手段2eが、車両が所定領域SAに位置すると判定した後、左右出力検出手段2fの左右出力の検出結果に基づいて車両が逆走しているか否かを判定する逆走判定手段2gを備えることを特徴とする。
(もっと読む)
カーナビゲーション装置
【課題】運転者が運転する車輌の進行路に関する交通規制情報を表示するカーナビゲーション装置を提供することを課題とする。
【解決手段】本発明によるカーナビゲーション装置1は、方向指示器208及び操舵角センサ209を備える車輌に搭載され、交通規制情報を表示及び/又は音声で案内するカーナビゲーション装置1であって、方向指示器208から方向指示情報及び操舵角センサ209から操舵角度情報を取得する進行方向情報取得手段と、進行方向情報取得手段により取得された方向指示情報及び/又は前記操舵角度情報に基づいて、車輌の進行路を判定する進行路判定手段201と、交通規制情報の表示及び音声出力を制御する表示出力制御手段204とを有し、表示出力制御手段204は、進行路判定手段201により判定された進行路に関する交通規制情報のみ、表示及び音声出力の両方を行う。
(もっと読む)
運転支援装置、運転支援方法及びコンピュータプログラム
【課題】交差点を走行する車両の死角を補完し、安全に走行を行わせることを可能とした運転支援装置、運転支援方法及びコンピュータプログラムに関するものである。
【解決手段】自車両54が交差点53に接近した場合であって、自車両が走行する道路が優先道路で、且つ自車両の走行する道路に交差する交差道路が非優先道路であり、更に自車両54が後方を走行する後続車両55を検出した場合に、検出した後続車両55に関する情報(位置座標や進行方向)を取得し、取得した後続車両に関する情報を、自車両が進入する側の交差道路60上に位置する他車両56〜58に提供するように構成する。
(もっと読む)
運転支援装置、運転支援方法及びコンピュータプログラム
【課題】現在の状況に適合した適切な案内を運転者に行うことができ、より安全に走行させることを可能とした運転支援装置、運転支援方法及びコンピュータプログラムを提供する。
【解決手段】自車両が交差点に所定距離まで接近した場合であって、その交差点に他車両が接近する場合には、自車両及び他車両の交差点の通過形態と交差点への進入タイミングをそれぞれ取得し、取得した各情報と音像定位パターン選択テーブルとに基づいて他車両を案内する案内音声を定位させる方向を選択し、選択された方向に音像を定位させるようにスピーカ16A〜16Dを制御するように構成する。
(もっと読む)
認識システム
【課題】他の通信装置から送信されてくる位置情報の精度を高めることができる認識システムの提供。
【解決手段】前方車両情報とインフラ情報とを照合し(S210〜S230)、同一の車両とみなせる情報について、位置及び速度の情報の平均を取ってその車両の情報とする(S260、S265)。また、一体の車両の情報とみなせる情報を探して(S270)、それを一体化する(S275)。さらに走行情報を用いることで未来の速度及び位置の推定値を補正する(S2800)。そして、自車線確率の計算(S290)、及び、衝突時間の計算(S293)を行い、衝突の危険がある車両に向けて自車両の情報を送信する(S295)。
(もっと読む)
ウインカ忘れ警告装置およびウインカ忘れ警告装置用のプログラム
【課題】曲折する予定の分岐点の手前でウインカをオンしていない場合に警告を発する技術において、より個々のドライバの特性に応じたタイミングで警告を行う。
【解決手段】車両用ナビゲーション装置は、曲折する予定の分岐点Aの手前において、当該分岐点Aが属する分岐カテゴリ(ステップ210)についてのウインカオン時学習距離を読み出し(ステップ215)、読み出したウインカオン時学習距離と、車両の現在位置から分岐点Aまでの距離と、を比較することで、自車両がウインカをオンすべき位置を過ぎてしまったか否かを判定し(ステップ225)、その判定結果が肯定的であるにも関わらず、ウインカがオンされていないことに基づいて(ステップ230)、車両のドライバに警告を行う(ステップ240)。
(もっと読む)
車線逸脱防止装置及びその方法
【課題】コンプライアンスステアによるトー角変化を抑制して、自車両の走行車線からの逸脱を防止するために必要な目標ヨーモーメントを適切に得る。
【解決手段】車線逸脱防止装置は、走行車線に対する車両の逸脱傾向を判定する車線逸脱傾向判定手段(ステップS3、ステップS4)と、車線逸脱傾向判定手段が逸脱傾向があると判定した場合に、車輪の制動力を制御して、左右輪に制動力差を発生させることで車両にヨーモーメントを付与する制動力制御手段(ステップS13、ステップS14)と、車輪に制動力を発生させる際に生じるコンプライアンスステアによるトー角変化を基に、制動力制御手段が車輪に発生させる制動力を補正するコンプライアンスステア用補正手段(ステップS10)と、を備える。
(もっと読む)
61 - 80 / 248
[ Back to top ]