
Fターム[2F129GG09]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 歩行者検知 (112)
Fターム[2F129GG09]に分類される特許
41 - 60 / 112
車両制御装置及び車両制御システム
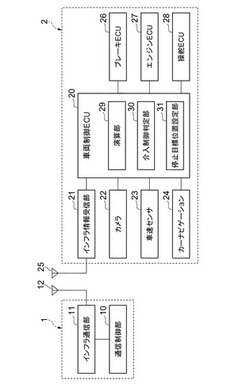
【課題】運転者への煩わしさを低減し、適切な制御を行える車両制御装置及び車両制御システムを提供する。
【解決手段】 車両制御装置2は、複数の車線の停止線の位置情報を取得するインフラ情報受信部21、取得した複数の停止線の位置情報に基づいて自車両Mから停止線までの残距離の最大値と最小値との差分を算出する演算部29、最大値と最小値との差分を閾値と比較して一時停止の介入制御可否を判定する判定部30、介入制御の場合に停止目標位置を設定する停止目標位置設定部31を備える。停止目標位置設定部31は、停止目標位置を、残距離のうち最小値の停止線または残距離の車線での加重平均値に設定する。
(もっと読む)
運転支援装置

【課題】緊急走行中の緊急車両に対して適切な運転支援を行うことができる運転支援装置を提供することを課題とする。
【解決手段】交差点における信号機の情報を取得する信号機情報取得手段と、車両の交差点における進行方向を検出する進行方向検出手段と、交差点に進入する移動体を検出する移動体検出手段と、車両の交差点における進行方向と交差点に進入する移動体に基づいて、車両と移動体との衝突を防止するための運転支援を行う運転支援手段とを備え、運転支援手段は、車両が交差点に進入するときの信号機の状態が進行不可信号の場合、進行不可信号のときには通常行わない運転支援を行うと決定することを特徴とする。
(もっと読む)
車載システム
【課題】ユーザが障害物の存在する方向を直ちに把握できるように、自車と障害物の位置関係を自車の進行方向を上方向として模式的に表した警告画像の出力と、現在位置を表した地図の表示との双方を行う「車載システム」を提供する。
【解決手段】制御部を、障害物情報受信機が路側機から受信した障害物情報に基づいて、障害物警告の要否を判定し、警告が必要な場合には、自車の進行方向を上方向として自車と障害物の位置関係を模式的に表した警告画像40を表示すると共に、ナビゲーション装置が表示している地図31の向きを、自車の進行方向側を上側とした向きに設定し、当該地図31上で自車の現在位置/進行方向と障害物位置/進行方向を表す(c)。
(もっと読む)
車載システム
【課題】自動車に搭載された車載システムにおいて、地図上に現在位置などを表した案内画像と共に、路側機から受信した警告物の情報に基いて障害物を警告する警告画像を速やかに表示する「車載システム」を提供する。
【解決手段】路側機200の通信エリア210外では、ナビゲーション装置16の生成する案内画像30を表示装置12の全面に表示する(a)。自動車が、路側機200の通信エリア210に進入したならば、画面モードとして二画面モードを設定し、ナビゲーション装置16が生成する案内画像30は、表示装置12の左側の案内画像表示ウインドウに表示する(b)。そして、路側機200より注意喚起を要する障害物情報を受信したならば、障害物情報が表す障害物を警告する警告画像40を、表示装置12の右側の警告画像表示ウインドウに表示する(c)。
(もっと読む)
車載装置及び情報提供方法
【課題】横断歩道以外を横断しようとする歩行者が存在する可能性がある場合にも情報提供を行い、乗員に十分な注意を促すことができる車載装置を提供する。
【解決手段】 車載装置は、処理部17の制御のもとに、車両が走行する道路状況を示す情報、交差点情報、及び交差点間における交通量に基づいて、対象地点について歩行者が横断歩道以外を横断する確率を示す横断歩道外横断確率を算出し、算出した横断歩道外横断確率に基づいて、情報提供部18を介して、車両の乗員に対して情報提供を実行する。
(もっと読む)
車両用警告システム
【課題】 車両用警報システムにおいて、誤判定による不要な警告が頻繁に出力されてしまうことを抑制する。
【解決手段】 物体方向検出回路7等により検出された物体の方向と視線方向検出装置40により検出された視線の方向との角度差Aを検出誤差として、視線方向検出装置40の検出誤差とその誤差の発生頻度との関係に基づいて一致度Eを算出し、この一致度Eに基づいて警告態様を決定する。これにより、運転者が要注視対象を見ているか否かの判断を二者択一で判断するのではなく、「一致度(見ている可能性)」に基づいて警告がされるので、運転者が煩わしさを感じ難い車両用警告システムを実現することが可能となる。
(もっと読む)
運転支援装置、及びプログラム
【課題】より安全な運転となるようにドライバの運転を支援する。
【解決手段】ドライバが注意すべき物体を検出し(200)、検出された物体の種類を特定し(204、214、218、222)、特定された種類に対応する抽象化された画像が表示されるように表示装置22の表示を制御する(242)。
(もっと読む)
運転支援装置
【課題】鮮度の高いインフラ情報を取得できるように複数の車両を配置させることができる運転支援装置を提供することを課題とする。
【解決手段】路側の所定の位置に配設された装置から提供されるインフラ情報に基づいて運転支援を行う運転支援装置であって、車両に搭載されるインフラ情報取得装置の性能情報を受信する受信手段と、複数の車両についてのインフラ情報取得装置の性能情報を比較する性能比較手段と、性能比較手段での比較結果に基づいて複数の車両の配置を決定する配置決定手段とを備えることを特徴とし、複数の車両の中でインフラ情報取得装置の性能が高い車両を後方に配置すると好適である。
(もっと読む)
危険地点記録装置、警報制御装置、及びプログラム
【課題】危険な状況が発生したときの対象や状況を考慮して、事故予防効果の高い警報を出力することができるようにする。
【解決手段】自車位置取得部26によって、自車両の位置を取得する。危険地点判定部42によって、自車位置取得部26によって取得された自車両の位置に基づいて、危険地点情報が記録された危険地点データベース34から、自車両の進行方向に存在する位置であって、かつ、自車両の位置との距離が所定範囲内である位置を示す危険地点情報を検索する。警報制御部44によって、検索された危険地点情報が示す道路構造の種類及び前方物体の種類に応じた警報メッセージを出力するように警報装置20を制御する。
(もっと読む)
安全支援装置、安全支援システム及び安全支援方法
【課題】
車両と移動体との衝突可能性の判断を、効率良く行う。
【解決手段】
サーバ装置730Aの抽出手段731が、移動端末装置750pの位置情報に基づき、車両CRの走行ルートにおける予定走行態様により決定される検出領域内に存在する移動端末装置750pを、監視対象として抽出する。そして、予測手段732が、監視対象の移動態様を予測し、危険位置導出手段733が、監視対象の移動態様と車両CRの予定走行態様とに基づき、車両CRと監視対象とが衝突する可能性のある危険位置を導出する。危険位置は車載装置720Aへ送られ、危険領域侵入検出手段723が、危険位置により定まる危険領域への車両CRの侵入を検出すると、侵入報告がサーバ装置730Aへ送られる。判断手段734は、侵入報告を受けると、車両CRの走行情報と監視対象の位置情報とに基づき、衝突する危険が存するか否かを判断する。
(もっと読む)
車両制御装置、車両制御方法および車両制御処理プログラム
【課題】自車両の進路または進路近傍に存在する障害物を確実かつ安全に通過させるように自車両を制御することを課題とする。
【解決手段】車両制御装置は、例えば、各種レーダからの入力に基づいて、自車両の進路または進路近傍に障害物を検知すると、検知された障害物に関する障害物情報、および自車両に関する自車両関連情報を各種レーダ等から取得する。障害物情報および自車両関連情報の取得後、車両制御装置は、検知された障害物を安全に通過できるか否かを判定する通過判定を実行する。具体的には、各種レーダ等から取得した障害物情報および自車両関連情報を用いて、自車両の運転者や同乗者が、安全と感じる程度以上の距離を障害物と自車両との間で保てるか否かを基準とした判定を行う。
(もっと読む)
車両用表示装置
【課題】視認性、判読性を向上させることが可能な車両用表示装置を提供する。
【解決手段】画像表示装置10と、この画像表示装置10に複数の車両情報を画像として表示させる制御手段20とを備えた車両用表示装置において、制御手段20は少なくとも第1の画像101,102を表示し第2の画像103は表示しない第1の表示モードと、少なくとも第1の画像101,102と第2の画像103の双方を表示する第2の表示モードとを切り替えると共に、第2の表示モードにて第1の画像101を表示する際、指標部Sの配列長LG2を第1の表示モードにおける配列長LG1よりも短く設定してなる。
(もっと読む)
車両周辺監視装置および車両周辺監視方法
【課題】車道の静止物体を検知し、静止物体の車両挙動への影響を考慮した運転支援を実現すること。
【解決手段】物体検知部10は、少なくともカメラ31およびレーダ32の何れか一方によって自車両の前側方を監視し、少なくとも画像認識11と反射波検知部12の何れか一方の出力に基づいて物体認識部13が自車両前側方の物体を認識し、移動判定部14によって認識した物体が移動物体であるか静止物体であるかを判定し、静止物体である場合には交差点補正処理部22が静止物の影響を考慮した交差点補正情報を作成する。
(もっと読む)
ドライバモデル作成装置
【課題】運転者の状態別のドライバモデルによって運転者の状態を適切に判断することできるドライバモデル作成装置を提供する。
【解決手段】本発明のドライバモデル作成装置は、車両走行における運転操作情報を取得する自車両情報取得部11と、取得した運転操作情報に基づいて運転者の状態に応じた運転操作のドライバモデルを作成するドライバモデル作成部151と、運転者の状態を判断するドライバ状態判定部154と、ドライバ状態判定部154によって判断された運転者の状態別にドライバモデル作成部151によって作成されたドライバモデルを分類して記憶するドライバモデル記憶部152と、ドライバモデル記憶部152に分類されて記憶される運転者の状態別ドライバモデルに基づいて運転者の状態を判断するドライバモデル依拠状態を判断するECU10と、を有することを特徴とする。
(もっと読む)
ナビゲーション装置およびナビゲーション装置用のプログラム
【課題】車両が交通事故に遭った場合に、ドライバに適切な行動を促すことのできるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置は、自車両が交通事故に遭ったことに基づいて(ステップ115)、自車両が移動可能である場合に(ステップ125)、安全な場所への経路を示し(ステップ135)、自車両が移動可能でない場合に(ステップ125)、自車両の周囲に注意を喚起させるよう、ドライバに指示を与える(ステップ130)。
(もっと読む)
路面標示認識装置
【課題】認識対象の路面標示と類似した形状の路面標示が存在する場合、実際の認識対象と異なる場所での誤認識が発生し、自車の位置が実際とは違う位置に算出される誤動作が発生する。
【解決手段】車両に搭載したカメラ108を用いて路面標示を認識させる際に、自車位置の周辺に、これから認識しようとしている路面標示と形状が類似している路面標示の有無に応じて、路面表示認識機能105の判定条件を変更する。類似した形状の路面標示が存在しない場合は、認識の判定条件とする画像上の特徴量の必要数を少なくし、路面標示のペイントのかすれ等の条件の悪い場合においても認識ができるようにする。一方、自車位置の周辺に形状が類似した路面標示が存在する場合は、認識の判定条件とする画像上の特徴量の必要数を多くし、類似した形状の路面標示において誤認識しないようにする。
(もっと読む)
情報提示システム
【課題】認識率の高い情報提示システムを提供する。
【解決手段】車両に搭載され、ロボット100を駆動させる駆動部120と、車両の状態に応じて発生した情報を出力する出力部130とを有するロボット100と、車両の状態に応じて発生した情報を取得する情報取得部210と、取得した情報に呼応して、駆動部120によりロボット100を駆動させ、ロボット100に情報を提示する旨を乗員に通知する動作を行わせる動作制御部220と、この情報を提示する旨を乗員に通知する動作の後、ロボット100に情報の提示動作を行わせる情報提示部230とを有するロボット制御装置200とを有する。
(もっと読む)
情報通知システム、携帯端末装置、車載装置及び情報送信方法
【課題】車載装置の演算処理負荷を低減させる。
【解決手段】歩行者が有する携帯端末装置10は、当該携帯端末装置10が存在する現在の位置を特定する現在位置情報を取得し、当該携帯端末装置10の移動速度、移動方向を検出し、検出される移動速度、移動方向から推定される当該携帯端末装置10を有する歩行者の挙動が、この歩行者の近傍を走行する車両にとって、注意を要するかどうかを判定し、注意を要すると判定されたことに応じて、取得された現在位置情報を無線通信により車載装置20に送信するよう制御することで実現する。
(もっと読む)
走行案内装置、走行案内方法および走行案内プログラム
【課題】注意地点に対する運転者の注意を継続的に喚起することができる技術を提供する。
【解決手段】注意地点の位置を示す情報を取得し、前記注意地点に対する自車両の接近度合いを示す情報を取得し、前記自車両の車内に継続的に流される音声の原音を発生させるための原音信号を取得し、前記接近度合いに応じた変調量で前記原音信号を変調して変調音信号を生成し、生成された前記変調音信号を用いて変調音をスピーカに出力させる。
(もっと読む)
注意喚起システム及びプログラム
【課題】前方車両が二輪車である場合に、運転者の注意を十分に喚起することができるようにする。
【解決手段】現在地検出部と、自車の前方を監視する前方監視部と、前方監視部による監視結果に基づいて、自車の前方を走行している二輪車が検出されたかどうかを判断する車両判定処理手段と、二輪車が検出された場合、自車位置より前方の道路情報を取得する道路情報取得処理手段と、道路情報に基づいて路面状態を判定する路面状態判定処理手段と、路面状態の判定結果に基づいて二輪車の走行状態を判定する前方車両走行状態判定処理手段と、二輪車の走行状態の判定結果に基づいて警告を行う警告処理手段とを有する。二輪車が検出された場合、路面状態の判定結果に基づいて警告が行われるので、運転者の注意を十分に喚起することができる。
(もっと読む)
41 - 60 / 112
[ Back to top ]