
Fターム[2F129GG10]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 他車両検知 (331)
Fターム[2F129GG10]に分類される特許
321 - 331 / 331
ナビゲーション装置及びナビゲーション方法
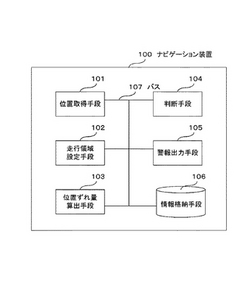
【課題】 ユーザの視線を前方に集中させたまま、ユーザに車両の進むべき方向を的確に伝達することができるナビゲーション装置及びナビゲーション方法を提供する。
【解決手段】 自身の位置を示す位置情報を取得する位置取得手段101と、車両の目的地までの進路における走行領域を設定する走行領域設定手段102と、取得された位置情報と設定された走行領域とに基づいて、走行領域に対する車両の位置ずれ量を算出する位置ずれ量算出手段103と、算出された位置ずれ量が所定の基準に合致するか否かを判断し、位置ずれ量が所定の基準に合致しないと判断された場合に、車両が走行領域に対して左右のどちらにずれているかを判断する判断手段104と、判断手段によって判断された結果に基づき、左右のどちらにずれているかを示す警報を発する手段に警報情報を出力する警報出力手段105とを備える。
(もっと読む)
衝突防止装置

【課題】 交差点での他車との衝突可能性を正確に、しかも効率的に判断して衝突事故を未然に防ぐに好適な簡易な構成の衝突防止装置を提供する。
【解決手段】 カーナビ情報と自車の車体速情報(速度,加速度)とに基づいて自車の交差点への進入時刻を推定し(交差点進入時刻推定手段)、推定した交差点進入時刻とその交差点の情報、および自車の進行方向情報等を他車との間で互いに情報交換する(情報通信手段)。そして車々間通信により得られた他車の情報から同一交差点にほぼ同時に進入する他車を特定すると共に、当該他車の進行方向情報に従って自車および他車の上記交差点への進入時刻をそれぞれ補正し(補正手段)、これらの補正された自車および他車の交差点進入時刻を相互に比較して衝突の可能性を高精度に判定する(衝突判定手段)。
(もっと読む)
車両の位置を設定するための方法及び装置
無線ネットワーク測位システム(2)によって、接続可能なターミナル(12)の位置を検出し、車両(1)の第1の位置信号をターミナル(12)及び/又は計算ユニット(11)に伝送する、無線ネットワーク測位システム(2)の少なくとも1つの接続可能なターミナル(12)と計算ユニット(11)とによって車両(1)の位置を設定するための方法及び装置において、第1の運転様式では、第1の位置信号が直接ポーリング毎に伝送され、その際、このポーリングは、手動及び/又は自動で発生され、第2の運転様式では、第1の位置信号が周期的に周波数(f)で伝送され、その際、この周波数(f)は、変更可能であるように構成する。 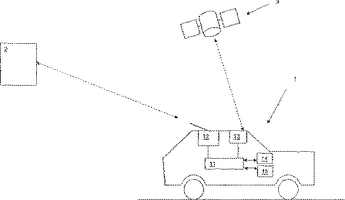 (もっと読む)
(もっと読む)
車両用ナビゲーション装置
【課題】 窓の開閉状態や、緊急車両の接近などを検知して、車室内の音声案内・警告報知を聞き取りやすくする車両用ナビゲーション装置を提供する。
【解決手段】 音声により乗員に種々の情報を報知する音声報知手段と、車両の窓の開口率を検出する開口率検出手段と、開口率が所定の開口率を超える場合に、音声報知手段の音量を増大する報知制御手段と、を有することを特徴とする車両用ナビゲーション装置として提供可能である。
(もっと読む)
接近移動体表示装置、システム及び方法
【課題】自車両から死角となる移動体の接近情報を検知してドライバに表示する。
【解決手段】地上に設置されたカメラで道路の交通状況を繰り返して撮像し、前記カメラで撮像された各画像情報に基づいて、当該道路を移動する移動体Cを認識し、前記認識された移動体Cの位置を算出し、前記算出された移動体Cの位置を、当該車両内の画面に表示する。
【効果】交差点4に進入しようとする移動体Cの位置を、当該車両内の画面上に表示することができる。この処理を繰り返して行い、表示を更新していけば、当該車両のドライバは、移動体Cの走行状況を、時々刻々と連続的に把握することができ、出会い衝突頭の事故を未然に防止することができ、交差点での安全運転を支援することができる。
(もっと読む)
複数車両の追従状態提示装置
【課題】 お互いの追従状態や追従可能性を把握しながらグループ走行することを可能にする追従状態提示装置を提供する。
【解決手段】 自車両情報取得部100で取得した自車両の走行情報と、送受信機20で受信した他車両の走行情報とに基づき、追従判定部50は、これらの車両が追従状態にあるか否かを判定する。追従判定部50による判定結果はモニタ30に表示される。
(もっと読む)
車両用運転支援装置及び車両用制御装置
【課題】本発明は、電波遮蔽物体が密集した交差点において、効率的な情報量で必要な情報を提供でき、受信側の負担を増大させることなく、双方向通信の有用性を高めることができる車両用運転支援装置の提供を目的とする。
【解決手段】本発明は、不特定多数の移動体との間で双方向通信が可能な通信装置を備えた車両用運転支援装置であって、自車の走行道路に交差する交差道路上を移動する移動体との通信により得た情報を用いて、電波を遮蔽する電波遮蔽物体が存在する通信抑圧交差点の存在を検出し、該通信抑圧交差点の存在が検出された場合にのみ、該通信抑圧交差点に関する通信抑圧交差点情報及び/又は前記交差道路上の移動体に関する移動体情報を、前記走行道路上の移動体に送信することを特徴とする。
(もっと読む)
車両の制御装置
【課題】 走行経路情報の検出精度に対応して車両の挙動をきめ細かく制御することの可能な車両の制御装置を提供する。
【解決手段】 人工衛星からの電波を受信機で受信することにより、車両の走行経路情報を検出する走行経路情報検出装置と、前記走行経路情報に対応して設定された制御パターンに基づいて前記車両の挙動を制御する挙動制御装置とを備えた車両の制御装置において、前記人工衛星からの電波を受信する受信機の受信信号が異常であるか否かを判断するとともに、前記車両が受信機による電波受信に不適当な場所を走行中であるか否かを判断することにより、前記走行経路情報検出装置により検出される走行経路情報の検出精度を検出する精度検出手段(ステップS11〜S14)と、前記走行経路情報の精度に基づいて前記制御パターンを変更する制御パターン変更手段とを備えている。
(もっと読む)
車両の制御装置
【課題】 走行経路情報の検出精度に対応して車両の挙動をきめ細かく制御することの可能な車両の制御装置を提供する。
【解決手段】 車両の走行経路情報を検出する場合に、各種のセンサの信号から検出される前記車両の走行軌跡と、情報記録媒体に記憶されているデータとを比較して、車両の現在位置を補正するマップマッチングを実行する走行経路情報検出装置と、走行経路情報に対応して設定された制御パターンに基づいて車両の挙動を制御する挙動制御装置とを備えた車両の制御装置において、マップマッチングの実行による車両の現在位置の補正が完了しているか否かを判断することにより、走行経路情報検出装置により検出される走行経路情報の検出精度を検出する精度検出手段(ステップS11,S12,S13)と、走行経路情報の精度に基づいて制御パターンを変更する制御パターン変更手段とを備えている。
(もっと読む)
ナビゲーション装置
ガイドのためにガイドオブジェクトが交通路に対して、該ガイドオブジェクトが車両によって行われるべき運転操縦を実施するように表示される、交通路網において車両をガイドするためのナビゲーション装置が提案される。運転者は運転者に示される運転操縦を繰り返し、こうしてその前に計算された走行ルートに従う。 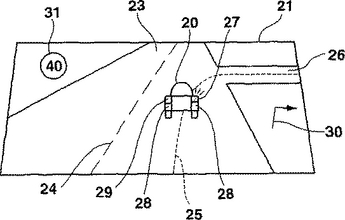 (もっと読む)
(もっと読む)
車両用表示装置、車両、表示方法、画像表示プログラム、および記録媒体
図1(a)に示すスピードメーター11が運転者の正面になるように画面10を配置する。右折指示を検出すると、図1(b)に示すように、ウインカー17を表示させるとともに右後方画像18を画面10の右側に表示する。左折指示を検出すると、図1(c)に示すように、ウインカー19を表示させるとともに左後方画像20を画面10の左側に表示する。左右に応じて異なる位置に表示させるので、直感的把握が容易となり、操作性を向上できる。すなわち、自動車に搭載される表示装置によって、自動車の操作性を確実に向上させる。 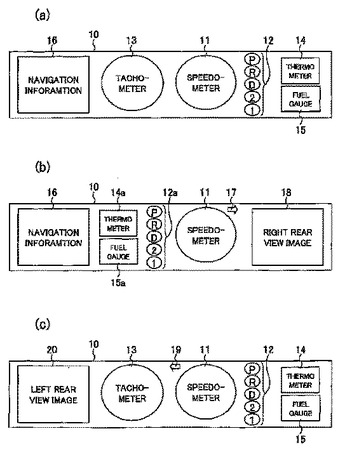 (もっと読む)
(もっと読む)
321 - 331 / 331
[ Back to top ]