
Fターム[2F129GG10]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 他車両検知 (331)
Fターム[2F129GG10]に分類される特許
101 - 120 / 331
運転支援装置及びプログラム
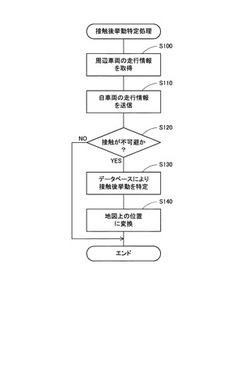
【課題】 車両の接触が起きた場合に、2次的な接触を考慮して支援を行う。
【解決手段】 周辺車両の走行情報が取得され(S100)、走行情報に含まれる各車両の予測軌道から周辺車両同士の接触が不可避であるか否かが判断される(S120)。接触が不可避であると判断されると(S120:YES)、データベースを参照することにより接触態様から接触後挙動が特定される(S130)。例えば、データベースを用い、周辺車両のうち該当車両の車種、積載量、接触時の車速、及び、接触形態に基づき、接触後移動方向、及び、接触後移動距離を特定するという具合である。接触後挙動が特定されると次に、地図データ上の危険エリアが特定され(S140)、特定された危険エリアに基づき、ブレーキ操作やハンドル操作が促される。
(もっと読む)
航海支援装置

【課題】
操船者が着目する各想定時刻における自船、物標の位置関係を最新時点の自船情報等に基づいて算出、表示できるようにする。
【解決手段】
所定の情報取得時刻毎に該時刻における自船等の位置、船速及び船針を含む自船情報を取得し、各想定時刻(位置等の算出時刻)における自船位置等を算出する。その際、表示させたい各想定時刻における自船等の位置の算出は、各算出時刻において、情報取得時刻のうち該算出時刻を基準として最新の情報取得時刻において取得された自船情報に基づいて算出するようにする。
(もっと読む)
車両走行支援制御方法および装置
【課題】
車両の走行中に有している運動エネルギーを最大限に活用することによって車両走行に必要なエネルギーおよび排出ガス量を削減する。
【解決手段】
走行経路中の停止点S0、S1、・・・Sn、Sn+1、・・・及びその停止順序をあらかじめ設定し、設定された停止点Sn およびSn+1 間の車両走行距離距離Dn+1 および前記停止点Sn からの走行距離ΔD から、現時点から次に停止すべき地点Sn+1 までの残距離Dr =(Dn+1−ΔD)を算出し、前記残距離Dr が現時点での走行速度vで惰性走行に移行した場合、次に停止すべき地点Sn+1 に惰性走行で到達可能な距離か否かを判定し、到達不可と判定した場合は現時点まで行ってきた加速走行あるいは定速走行を継続し、その後一定時間あるいは一定走行距離走行後改めて前記惰性走行可否の判定を行う。到達可能と判定した場合は惰性走行に移行して次に停止すべき地点Sn+1まで走行する。
(もっと読む)
運転支援装置
【課題】鮮度の高いインフラ情報を取得できるように複数の車両を配置させることができる運転支援装置を提供することを課題とする。
【解決手段】路側の所定の位置に配設された装置から提供されるインフラ情報に基づいて運転支援を行う運転支援装置であって、車両に搭載されるインフラ情報取得装置の性能情報を受信する受信手段と、複数の車両についてのインフラ情報取得装置の性能情報を比較する性能比較手段と、性能比較手段での比較結果に基づいて複数の車両の配置を決定する配置決定手段とを備えることを特徴とし、複数の車両の中でインフラ情報取得装置の性能が高い車両を後方に配置すると好適である。
(もっと読む)
走行支援装置、走行支援方法及びコンピュータプログラム
【課題】追従走行中及び追従走行後の適切な制御スケジュールを生成することができるとともに、制御部の処理負担についても軽減することが可能な走行支援装置、走行支援方法及びコンピュータプログラムを提供する。
【解決手段】ACCシステムにより追従走行制御が実行されている場合に、追従対象となる前方車両の走行予定経路と走行情報を取得し(S25)、車両2の走行予定経路と前方車両の走行予定経路とを比較することにより追従走行区間を特定し(S27)、追従走行区間の前方車両の推定車速及び推定加速度から追従走行区間を走行する車両2の車速及び加速度を推定し(S28)、追従走行区間での追従走行制御を考慮した制御スケジュールを新たに生成する(S30)ように構成する。
(もっと読む)
運転支援装置
【課題】交差点での右折という緊張が高まる場面にて運転者の視線移動状態に応じて精度の高い緊張度の推定が行える運転支援装置を提供すること。
【解決手段】車両が交差点で右折待ち状態である場合に後続車に対する車両の運転者の視線移動状態に基づいて車両の運転者の緊張度を推定し(S20)、その推定された緊張度に応じて緊張を緩和させる運転支援を行う(S22)。これにより、交差点での右折という緊張が高まる場面にて運転者の視線移動状態に応じて精度の高い緊張度の推定が行える。
(もっと読む)
情報提供装置および情報提供方法
【課題】本発明は、安全運転支援システムにおいてよりロバストな出会い頭事故防止の運転支援を行い、適切なタイミングによる情報提供の供与と解除が可能な情報提供装置および情報提供方法を提供することを目的とする。
【解決手段】本発明による情報提供装置は、対象車両が走行している道路が優先道路27または優先道路27と交差点にて交差する非優先道路28のいずれかを判定する道路条件判定部13bと、対象車両と交差点で交差する移動体と対象車両とが交差点に到達するまでの交差点予測到達時間を用いて両者の交錯を判定する時間条件判定部13cと、対象車両と移動体とが交差点に到達するまでの交差点予測到達距離を用いて両者の交錯を判定する距離条件判定部13dと、対象車両の動作状態を判定する運転条件判定部13eとを含み、各判定部による判定結果に基づいて情報提供または注意喚起を行うか否かを判断することを特徴とする。
(もっと読む)
表示制御システム、表示制御方法、及び表示制御プログラム
【課題】画面の切替が運転者に与える影響度に基づいて表示手段の出力の切替を行うことができる、表示制御システム、表示制御方法、及び表示制御プログラムを提供すること。
【解決手段】表示制御システム1は、車両に設置されたモニタ60やインストルメント・パネル70の出力の切替を行う表示制御システム1であって、切替後にモニタ60等が出力する情報の重要度を取得する重要度取得部81aと、切替を行うタイミングにおける当該切替が運転者に与える影響度を特定する影響度特定部81bと、重要度と影響度とに基づいて、切替の態様を決定する切替態様決定部81cとを備える。
(もっと読む)
安全運転評価システム及び安全運転評価プログラム
【課題】信号機設置地点を走行する際の運転者の安全運転意識及び安全運転技術の向上を図ることのできる安全運転評価システムを提供する。
【解決手段】車両の進行方向前方に存在する信号機の表示状態を示す信号情報を取得する信号情報取得手段8と、信号機が設置されている信号機設置地点の手前に設定された所定の停止補助区間内に車両がいることを判定する区間判定手段10と、車両が停止補助区間内にあり、信号情報が赤信号を示している状態を赤信号遭遇状態と判定する赤信号判定手段15と、赤信号遭遇状態での車両の運転操作に基づいて、運転者に対して信号機設置地点で車両を停止させるための停止補助動作を行う停止補助手段16と、赤信号遭遇状態となった回数である赤信号遭遇回数に占める、停止補助動作がなされた回数である停止補助回数の割合に応じて停止補助割合を算出する割合算出手段22と、を備える。
(もっと読む)
危険地点記録装置、警報制御装置、及びプログラム
【課題】危険な状況が発生したときの対象や状況を考慮して、事故予防効果の高い警報を出力することができるようにする。
【解決手段】自車位置取得部26によって、自車両の位置を取得する。危険地点判定部42によって、自車位置取得部26によって取得された自車両の位置に基づいて、危険地点情報が記録された危険地点データベース34から、自車両の進行方向に存在する位置であって、かつ、自車両の位置との距離が所定範囲内である位置を示す危険地点情報を検索する。警報制御部44によって、検索された危険地点情報が示す道路構造の種類及び前方物体の種類に応じた警報メッセージを出力するように警報装置20を制御する。
(もっと読む)
緊急車両認知支援装置
【課題】 運転者の認知レベルが低下した場合に、緊急車両の接近認知をタイムリーかつ的確に支援できる緊急車両認知支援装置を提供する。
【解決手段】 運転者の緊急車両接近に対する注意集中度を、生体情報に基づいて特定される精神活性度と精神愉快度との組合せに基づいて特定する。また、カーナビゲーションシステム16が地図上に特定する現在走行路に係る、車両現在位置よりも前方に位置する走行予定路の線形情報を取得する。注意集中度が一定レベルまで低下した場合に、緊急車両の認知支援ないし運転誘導の内容を走行予定路の線形に応じて決定し、出力する。
(もっと読む)
車両用緊急車両接近検出システム
【課題】 通信に頼ることなく緊急車両の接近認知を問題なく実施でき、その接近に係る認知支援や運転誘導を的確に実施できる車両用緊急車両接近検出システムを提供する。
【解決手段】 車両上の異なる位置にマイクロフォン15を設置し、各マイクロフォン15で抽出されるサイレン音の音量や位相の差に基づいて、緊急車両の接近方向を特定することにより、接近方向に応じた緊急車両の認知支援ないし運転支援を的確に行なうことができる。さらに、空中を伝播するサイレン音をマイクロフォンで直接捉えて接近方向検知するので、通信インフラ整備が不要であり、通信途絶等の影響を受けない車両用緊急車両接近検出システムを安価に構築できる。
(もっと読む)
案内制御装置、案内制御方法、及び案内制御プログラム
【課題】自車が走行を開始する道路の交通の流れに応じた案内情報を出力することが可能となる、案内制御装置、案内制御方法、及び案内制御プログラムを提供すること。
【解決手段】案内制御装置10は、自車が道路に対して走行を開始する初期走行位置から所定距離内に位置する、道路が接続する信号交差点の有無を判定する判定部11bと、初期走行位置から所定距離内に位置する信号交差点が有るものと判定部11bが判定した場合、信号交差点の信号機の点灯状態を特定する点灯状態特定部11cと、点灯状態特定部11cが特定した点灯状態に応じて道路の走行を開始する際の案内情報の出力制御を行う案内制御部11dとを備える。
(もっと読む)
安全支援装置、安全支援システム及び安全支援方法
【課題】
車両と移動体との衝突可能性の判断を、効率良く行う。
【解決手段】
サーバ装置730Aの抽出手段731が、移動端末装置750pの位置情報に基づき、車両CRの走行ルートにおける予定走行態様により決定される検出領域内に存在する移動端末装置750pを、監視対象として抽出する。そして、予測手段732が、監視対象の移動態様を予測し、危険位置導出手段733が、監視対象の移動態様と車両CRの予定走行態様とに基づき、車両CRと監視対象とが衝突する可能性のある危険位置を導出する。危険位置は車載装置720Aへ送られ、危険領域侵入検出手段723が、危険位置により定まる危険領域への車両CRの侵入を検出すると、侵入報告がサーバ装置730Aへ送られる。判断手段734は、侵入報告を受けると、車両CRの走行情報と監視対象の位置情報とに基づき、衝突する危険が存するか否かを判断する。
(もっと読む)
車両制御装置、車両制御方法および車両制御処理プログラム
【課題】自車両の進路または進路近傍に存在する障害物を確実かつ安全に通過させるように自車両を制御することを課題とする。
【解決手段】車両制御装置は、例えば、各種レーダからの入力に基づいて、自車両の進路または進路近傍に障害物を検知すると、検知された障害物に関する障害物情報、および自車両に関する自車両関連情報を各種レーダ等から取得する。障害物情報および自車両関連情報の取得後、車両制御装置は、検知された障害物を安全に通過できるか否かを判定する通過判定を実行する。具体的には、各種レーダ等から取得した障害物情報および自車両関連情報を用いて、自車両の運転者や同乗者が、安全と感じる程度以上の距離を障害物と自車両との間で保てるか否かを基準とした判定を行う。
(もっと読む)
車載通信装置、及びナビゲーション装置
【課題】車車間通信情報による案かな安全運転支援サービスを実現する車載通信装置を提供する。また、本車載通信装置を導入後に、ナビゲーション装置を後から装着しても車載通信装置との接続を可能とした安全運転支援サービスを提供する。
【解決手段】自車両の車両走行情報を生成し周辺車両と送受信し、自車両の走行に注意警戒が必要な情報を受信した場合は、ドライバに通知する。またナビゲーション装置と接続するナビ接続手段を搭載し、ナビゲーション装置と接続している場合には、車両走行情報生成処理をナビゲーション装置で行うことにより、車載通信装置導入後にナビゲーション装置を搭載する場合にも対応することが可能となる。
(もっと読む)
路面滑り易さ判定システム
【課題】ABS装置等のスリップ防止機能の作動情報を適切に判定して、路面の滑り易さを的確に判定することが可能な路面滑り易さ判定システムを提供する。
【解決手段】路面滑り易さ判定システム1は、車両2が有するスリップ防止機能の作動情報等を検出する検出手段21と、スリップ防止機能の作動情報等に基づいてスリップ防止機能が作動された地点Pの路面の滑り易さを判定する路面状態判定手段3とを備え、路面状態判定手段3は、路面が滑り易いためにスリップ防止機能が作動された可能性が高い走行状態ほど高い値の基準点paを設定するための第1判定条件群に基づいて基準点paを定め、スリップが生じ難い車両状態に対応する車両情報ほど大きな値の重み付け係数w1〜w4を設定するための第2判定条件群に基づいて重み付け係数w1〜w4を選択し、それらに基づいてスリップ防止機能が作動された地点Pの路面の滑り易さをポイントpとして算出する。
(もっと読む)
飛翔体、飛翔体の飛翔方法及びコンピュータプログラム
【課題】目標の周りの電波の散乱強度が強い方向から、飛翔体をこの目標に接近させることが可能な飛翔体を提供する。
【解決手段】操舵装置12と、目標機2にて反射される電波の反射波を受信する受信部7と、この検波出力から目標機2を捕捉して追跡し、目標方向への測角信号を計算する目標検出器8と、慣性装置13と、飛翔位置及び飛翔速度と予め記憶した目標機2の初期位置及び初期速度とに基づき目標機2の位置及び速度を計算し飛翔体3と目標機2との会合点の方向に向かう飛翔経路を推定演算する方向推定器9と、誘導計算を行って操舵装置12に対する操舵信号を出力する誘導処理器11とを備え、方向推定器9は目標位置及び電波送信源1を含み地表に垂直な面A上で散乱波の散乱強度が強い方向に延びる直線Dを求め、直線Dと目標機2の位置とに基づき飛翔体3の通過点を算出し、誘導処理器11はこの通過点についての操舵信号を計算する。
(もっと読む)
運転支援装置、運転支援方法及びプログラム
【課題】追い越し後の状況を考慮した安全な追い越し走行を支援することが可能となる運転支援装置、運転支援方法及びプログラムを提供する。
【解決手段】CPU41は、方向指示スイッチ51から点灯指示信号が入力された際には、追い越しのための車線変更を行った後、更に、自車両が現在走行している走行車線上へ復帰する必要がある場合には、誘導経路上における自車前方の次の進路変更地点に基づいて復帰必要地点を設定する。また、CPU41は、現在の自車位置から追い越し走行後、自車両が進入可能な車両間スペースに復帰する復帰地点を算出し、この復帰地点が復帰必要地点よりも手前でない場合には、追い越し走行後、当該進路変更地点において進路変更を安全に行うことができないと判定する。
(もっと読む)
音響警報装置
【課題】自車両に接近する標的物体の認知度を向上させることを課題とする。
【解決手段】自車両に接近する移動体を検出する第1の検出装置10で検出された移動体の位置、方向、ならびに警報音を出力するか否かを検出処理装置12で判別し、警報音を出力する場合には、移動体の位置、方向に対応して移動を伴う立体音像を立体音生成装置13で生成し、生成された立体音像を可聴の警報音として出力装置15から出力することを特徴とする。
(もっと読む)
101 - 120 / 331
[ Back to top ]