
Fターム[2F129GG12]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 道路形態 (463)
Fターム[2F129GG12]に分類される特許
201 - 220 / 463
車両走行支援装置、車両、車両走行支援プログラム
【課題】車両に搭載されている撮像装置への映り込みの影響を確実に排除して、この車両の周辺状況を正確に認識することができる装置等を提供する。
【解決手段】車両走行支援装置10によれば、カメラ12を通じて得られた画像の輝度の度数分布を表わすヒストグラムにおいて、低輝度側からの度数N(Li)の累計値ΣN(Lj)が閾値Nthに達したときの輝度Liが指定輝度LCとして設定される。指定輝度LCはカメラ12への映り込みにより画像の輝度が全体的に高くなっているほど高くなる等、映り込みによる画像の輝度の上昇度合を表わしている。したがって、画像の輝度が指定輝度LCにもとづいて補正されることにより、映り込みの影響が排除された補正画像が得られ、この補正画像に基づいて車両1の進行方向の状況が正確に認識されうる。
(もっと読む)
運転支援装置、運転支援方法及びコンピュータプログラム

【課題】現在の状況に適合した適切な案内を運転者に行うことができ、より安全に走行させることを可能とした運転支援装置、運転支援方法及びコンピュータプログラムを提供する。
【解決手段】自車両が交差点に所定距離まで接近した場合であって、その交差点に他車両が接近する場合には、自車両及び他車両の交差点の通過形態と交差点への進入タイミングをそれぞれ取得し、取得した各情報と音像定位パターン選択テーブルとに基づいて他車両を案内する案内音声を定位させる方向を選択し、選択された方向に音像を定位させるようにスピーカ16A〜16Dを制御するように構成する。
(もっと読む)
路面凍結予測装置
【課題】路面の凍結が予想される特定位置において蓄積した気象条件と凍結との関連から、特定位置における路面の凍結の有無を高精度に予測する路面凍結予測装置を提供する。
【解決手段】車両11に搭載された車載装置12および情報センター13には、凍結が予想される特定位置における天候情報および凍結情報を関連づけて蓄積している。そのため、路面凍結が生じるに至るまでの過去の天候の変化が凍結管理データとして蓄積される。これにより、情報センター13の凍結予測部は、特定位置における現在の天候情報から蓄積された凍結管理データと照合することにより、過去の天候変化も加味して特定位置における路面凍結の有無を予測する。そして、情報センター13は、車両に搭載された車載装置12へ予測結果を送信する。これにより、車両11側では特定位置における凍結の予測を取得することができる。
(もっと読む)
車載報知装置
【課題】乗員の煩わしさを低減できるようにする。
【解決手段】各地における運転操作の注意喚起を行うための注意喚起データを車両種別毎に管理する交通情報センタ3から自車位置周辺における自車の車両種別に該当する注意喚起データのみを取得し(S300、S302、S304)、取得した注意喚起データに基づいて注意喚起のための報知を行う(S318)。
(もっと読む)
勾配情報演算装置、車両走行制御装置、ナビゲーションシステム
【課題】道路の勾配値を高密度に取得可能な勾配情報演算装置、ナビゲーションシステム、及び、車両走行制御装置を提供すること。
【解決手段】自律航法により3次元上の位置情報を検出し、所定時間に、移動した移動距離と、移動距離を水平面に投影した平面距離とに基づき、第1の勾配値Bを演算する第1の演算手段14と、道路を、位置情報の知られたノードと、ノードを連結したリンクとにより表現する道路地図情報を記憶する道路地図情報記憶手段17と、予め計測されている標高データからノードの標高を推定し、ノード間の標高差及びリンク長から第2の勾配値Aを演算する第2の演算手段16と、第1の勾配値と第2の勾配値を比較して、その偏差に応じて、第1又は第2の勾配値のいずれを該リンクの勾配値に採用するかを決定する勾配データ選択手段と、を有することを特徴とする勾配情報演算装置を提供する。
(もっと読む)
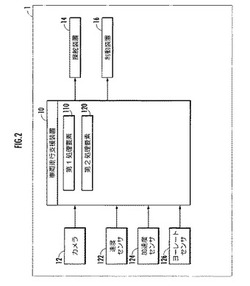
車両運転の過程を監視するための装置
車両運転の過程を監視するための装置であって、信号を処理する第1の手段と、車両の動きを検出する第2の手段と、ユーザに情報を表示する対話型の表示部を提供する手段と、車両の理論上の最適な挙動に関する燃料消費特性および技術的特徴を知るように構成された手段を備えた装置において、上記信号を処理する手段は、車両の上記燃料消費特性と技術的特徴に基づいて理論上の最適な消費を計算し、実際の消費を理論上の最適な消費に等しくするために要求される運転パラメータを確立し、この運転パラメータに関する情報をユーザに知らせるべく表示に利用できる手段に表示するようになっている。 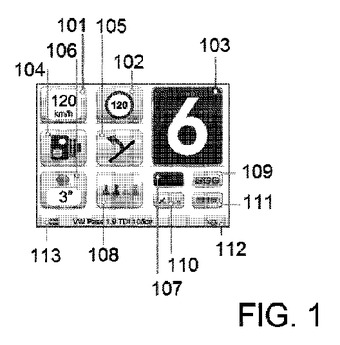 (もっと読む)
(もっと読む)
車両運転支援システムおよび車両運転支援方法
【課題】走行する徐行区間の道路幅の広狭、見通しの善し悪し、土手や崖の有無等、個々の徐行区間毎の道路状況や周囲環境を考慮することで、その徐行区間の実走行の際に適正な速度で走行できるようにする。
【解決手段】徐行区間に進入する前に当該徐行区間における道路環境情報を取得する環境情報取得部13と、環境情報取得部13からの道路環境情報をもとに該当する徐行区間の道路環境に応じた最適な区間内通過速度を演算する区間内通過速度演算部15とを備えていて、該当する徐行区間の実走行時に区間内通過速度演算部15にて求めた最適な区間内通過速度となるように車速を制御する。
(もっと読む)
車両用周囲監視装置
【課題】死角領域の画像内の物体の自車両からの距離を把握し易い車両用周囲監視装置を提供する。
【解決手段】本発明による車両用周囲監視装置によれば、ドライバーから見て前方で左右に広がる領域内の死角領域を監視し、死角領域の実画像を撮像するように車両の前方部に設けられた実画像撮像手段2、4、6と、所定の実物体の画像を仮想画像として取得する仮想画像取得手段38と、撮像された死角領域の実画像内において、取得された実物体の仮想画像を表示する位置を規定し、その表示位置に基づいてドライバーが距離感をつかめるように実物体の仮想画像の大きさを規定する仮想画像規定手段34、42、36と、仮想画像を仮想画像規定手段により規定される位置及び大きさで実画像に重畳して表示する表示手段26、14と、を有する。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】スロットル制御が解除されたときに、運転者自身のアクセルペダルの踏み込み量から予測される車両の挙動と実際の車両の挙動とがスムーズに合致しないと感じることがあった。
【解決手段】自車両のアクセルペダルの位置と駆動源の出力の調整量とについて予め設定された対応関係を適用せずに前記調整量を制御し、前記対応関係を適用せずに前記調整量が制御されることによって前記自車両が基準車速で走行する基準車速走行区間の終了地点を、前記自車両が通過したか否かを判定し、前記自車両が前記終了地点を通過したと判定されると、通過した時点での実際の調整量に対して前記対応関係を適用した場合のアクセルペダルの位置と、通過した時点での実際のアクセルペダルの位置と、のずれを解消する方向に前記アクセルペダルを駆動するための制御を行う。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】運転者の心理的状態に対応した適切な車速の制御を行うことはできなかった。
【解決手段】自車両の前方の下り勾配の道路を走行する際に前記自車両の運転者に心理的影響を与える要因を示す要因情報を取得し、前記要因情報に基づいて前記下り勾配の道路を走行する際に前記運転者に与えられる総合的な心理的影響を取得し、前記総合的な心理的影響に応じて前記自車両に搭載された車速制御部に車速を制御させる。
(もっと読む)
走行支援装置
【課題】目的地に早く到着することができる走行支援装置を提供する。
【解決手段】走行支援装置は、ECUとアクチュエータとを備え、ECUによって、複数の進路候補Sが取得され、進路候補Sが複数の位置候補P1〜Pkに離散化され、これらの位置候補P1〜Pkから目的地までの各総和距離が算出され、算出した総和距離が最小となる進路候補が、複数の進路候補Sから選択される。よって、走行支援装置によれば、進路候補Sを評価するに際して進路候補S上の複数の位置が考慮され、車両が目的地Tに向かって短時間で近づくこととなる。その結果、例えば、進路候補Sの終点Pkに車両が到達する前に進路候補Sが更新されても、目的地に向かって車両が僅かしか進まないことが防止される。
(もっと読む)
運転支援装置
【課題】 ユーザの視力に応じて撮像された道路標識データを拡大して表示することができる「運転支援装置」を提供する。
【解決手段】 運転支援装置は、自車の進行方向を撮像する撮像手段と、撮像手段により撮像された撮像データから道路標識の有無を検出する道路標識検出手段と、道路標識が検出されたとき撮像データから道路標識データ320を抽出する抽出手段と、少なくともユーザの視力情報に基づき道路標識デー320タを表示するときの倍率を決定する倍率決定手段と、決定された倍率に基づき道路標識データを加工する道路標識加工手段と、加工された道路標識データ320を表示する表示手段とを有する。
(もっと読む)
車両の定点停止制御方法および装置
【課題】例えば一時停止線に自動停止する場合に、停止間際において、ナビから送信されてくる残距離が、急に0になったり、逆に増加したりして、停止線までの残距離が若干変動したとしても、違和感のない停止制御を実現する。
【解決手段】GPS情報に基づいた自車の現在位置が、目標停止点に停止するために減速開始すべき距離に到達すると、GPS情報による自車の現在位置情報に基いて、定点停止のための第1の減速制御を開始する。そして、たとえば一次停止線の4〜5m程度の停止間際になったら、GPS情報を使わずに、車上にて走行距離を積算して現在位置情報を求め、これに基づき、定点停止のための第2の減速制御を停止に至るまで実行する。
第2の減速制御の間には、その基準となる残距離が、急に0になったり、逆に増加したりすることは一切無くなるので、停止線まで正確でスムースな減速制御を実現できる。
(もっと読む)
三次元機械地図、三次元機械地図生成装置、ナビゲーション装置及び自動運転装置
【課題】 ナビゲーションや自動運転のための三次元地図を、人間がみるのではなく機械が自分の位置と姿勢を判断するための三次元機械地図を提供する。
【解決手段】 走行中の車両から全周映像を取得する全周映像撮影装置111と、全周映像に基づいて全周CV映像を生成するCV演算装置112と、全周CV映像から幾何学的単純図形を抽出・選択・分離してその位置座標と姿勢を三次元的に求める幾何学的単純図形検出装置113と、幾何学的単純図形検出により検出された図形のトラッキングデータからその三次元位置と姿勢を検出して三次元座標を付加する三次元座標付加装置114と、検出された幾何学的単純図形に属性を与える属性登録装置115と、検出された幾何学的単純図形から元となる三次元空間に対応する三次元空間を再構築して三次元機械地図を生成・記録する三次元機械地図記録装置116とを備える構成としてある。
(もっと読む)
車載装置及び前方情報提示方法
【課題】障害物の存在地点の情報を含まない形態で、当該障害物の発生を通知された場合にも、ユーザに対して障害物の存在地点の通知を含む注意喚起を行える「車載装置及び前方情報提示方法」を提供する。
【解決手段】前方障害物情報を受信した時点における現在位置の直進方向に最初に存在する急カーブ地点510を障害物地点として推定し、急カーブ地点510まで現在位置からの道程距離と所要時間と共に注意喚起を促すメッセージ503を表示装置4に表示する(b)。また、地図画像501の縮尺を現在位置と障害物地点との関係や、現在位置から障害物地点までの道路区間をより視認し易い縮尺となるように変更すると共に、地図画像501上の障害物地点の位置に、所定の図形による渋滞表示504を行う。
(もっと読む)
車両用報知装置、無線装置および情報センタのサーバ
【課題】VICS情報送信装置を増設することなく、情報センタから最新の危険情報を受信して乗員に報知できるようにする。
【解決手段】路側に設置されたガードレール1に、設置位置が危険箇所であることを示す危険箇所通知を定期的に送信する無線装置20を取り付けておく。車両3に搭載された車両用報知装置は、無線装置20から危険箇所通知を受信すると、各地の危険情報を配信する情報センタ6に無線装置20が取り付けられたガードレール1の設置位置における危険情報の送信を要求し、情報センタ6からガードレール1の設置位置における危険情報を受信すると車両3の乗員に報知する。
(もっと読む)
空気循環システム
【課題】測定誤差が生じるような状況にあっても遮蔽区域で内気循環と外気導入とを確実に切り替えることができる空気循環システムを提供する。
【解決手段】空気を室内で循環させる内気循環モードにするか外気を導入する外気導入モードにするかを切り替える空調制御部1と、現在位置を測位する測位部11と、地図データを記憶した地図データ記憶部13と、測位部で測位された現在位置が、地図データ記憶部から読み出した地図データによって示される遮蔽区域の手前の第1の所定距離から該遮蔽区域を通過した後の第2の所定距離の範囲にある場合に、空調制御部に内気循環モードへの切り替えを指示する制御部15を備えている。
(もっと読む)
情報提供装置
【課題】情報提供の優先度を動的に変更することにより適切な情報提供が行える情報提供装置を提供すること。
【解決手段】安全運転支援サービスを含む複数のサービス情報をサービス優先度に応じて提供する車両用の情報提供装置であって、車両の走行状態に応じて安全運転支援サービスの情報提供の優先度を変更し(S20)、変更した優先度に応じてサービス情報の提供を行う(S30)。このように、車両の走行状態に応じて安全運転支援サービスの情報提供の優先度を変更することにより、不要なサービス情報の提供を抑え、必要に応じたサービスの情報を適切に提供することができる。
(もっと読む)
運転支援装置、運転支援方法及びプログラム
【課題】フロントピラーによる進行方向前方の死角領域の視界を補完することが可能となる運転支援装置、運転支援方法及びプログラムを提供する。
【解決手段】CPU41は、地図情報DB25に格納された地図情報から自車両2の前方の道路の形状に関する道路形状情報を取得する。また、CPU41は、運転者8の右側フロントピラー3によって生じる死角領域を算出する。そして、CPU41は、この算出した死角領域の少なくとも一部が、進行方向前方の道路に重なったと判定した場合には、カメラ4によって撮影された当該死角領域に対応する撮影画像をピラーディスプレイ7に表示する。その後、CPU41は、この算出した死角領域が、進行方向前方の道路に5秒以内に重ならないと判定した場合には、ピラーディスプレイ7の映像表示を停止する。
(もっと読む)
制限速度報知装置および制限速度報知装置用のプログラム
【課題】車線によって制限速度が異なるような道路に対応した制限速度表示の技術を提供する。
【解決手段】車両用ナビゲーション装置は、路面カメラによって撮影された画像に基づいて、複数車線道路中の自車線の制限速度を特定し、特定した自車線制限速度の表示36を地図表示画像30に重畳する。また、自車線の制限速度と隣接車線の制限速度とが異なっている場合、その旨の注意表示37および隣接車線の制限速度の表示37、38を地図表示画像30に重畳する。
(もっと読む)
201 - 220 / 463
[ Back to top ]