
Fターム[2F129GG12]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 道路形態 (463)
Fターム[2F129GG12]に分類される特許
21 - 40 / 463
運転支援装置
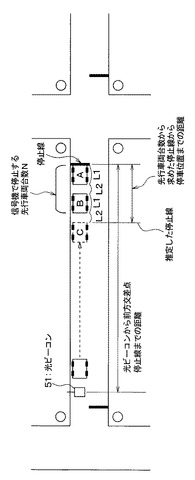
【課題】より適切に減速操作の案内を行うようにする。
【解決手段】搭載車両の走行先に存在する信号機より手前に設置された光ビーコン51から送信される情報を受信して搭載車両が走行先に存在する信号機の手前で停車する際の搭載車両の停車位置を推定し(S116)、予め定められた基準値以下の減速度で、推定した停車位置に搭載車両を停止させるための減速操作を開始すべき減速操作開始位置を特定し(S120、S122)、搭載車両が減速操作開始位置に到達する前に、運転者に減速操作の開始を促す案内を行う(S132)。
(もっと読む)
運転支援装置及びプログラム

【課題】ユーザの納得性を向上させつつ、簡易な構成で運転支援を行う。
【解決手段】情報取得部22が、GPS装置12から自車両の位置を示す情報を取得すると共に、自車両位置周辺の規制速度、道路構造及び道路幅を含む道路情報を電子地図データシステム14から取得し、ハザード選定部24が、規制速度及び道路構造に対応するハザード候補を選定する。通過可能領域幅算出部26が、選定されたハザード候補に応じたマージンを得て、道路幅からマージンを差し引いて自車両が通過可能な領域幅を算出する。目標通過速度算出部28は、通過可能な領域幅に応じて、目標通過速度を算出し、支援判定部30が、通過可能な領域幅または目標通過速度と現在の車速とから求まる減速度に応じて、運転支援の可否または支援レベルを判定し、支援制御部32が、支援判定部30の判定結果に応じた運転支援が実行されるように制御する。
(もっと読む)
速度超過警告装置
【課題】運転者の煩わしさを低減する。
【解決手段】車両が警告を必要としない特定の状況にあるか否かを判定し(S114、S116、S118、S120)、車両の速度が警告速度を超過していると判定された場合であっても、車両が合流状態、追越状態、交通流走行状態といった特定の状況にあると判定された場合には、第1の警告音よりも警告の度合いの低い第2の警告音をスピーカから出力させる(S200、S300、S400、S500、S600)。
(もっと読む)
航空機をタキシングするための操舵方法
【課題】航空機タキシングのための方法、非一時的なコンピュータ可読媒体、および航空機を提供すること。
【解決手段】特定の一方法は、曲線区間を有する誘導路に対して相対的な航空機の場所を決定する。方法は、曲線区間の少なくとも第1の部分を通って航空機を操舵するための第1の前脚ステアリング角度を決定する。第1の前脚ステアリング角度は、航空機の前脚を誘導路中心線から逸れさせるように選択される。第1の前脚ステアリング角度は、曲線区間の少なくとも第1の部分を航空機が横断する際に航空機のステアリングポイントをほぼ誘導路中心線の上に保持するように選択される。ステアリングポイントは、航空機の前脚と主脚との間に位置する。
(もっと読む)
ナビゲーション装置
【課題】車両が逆走する可能性が高い場合に、当該車両が逆走を開始する前に警告して安全な走行支援を行う。
【解決手段】ナビゲーション装置10は、退出不可能道路検出部41により、走行中の道路に退出不可能道路が接続しているか否かを検出し、接続方向検出部42により、退出不可能道路が走行中の道路に対して接続する方向を検出し、接続点特定部43により、退出不可能道路が走行中の道路に接続する接続点を特定し、挙動判定部44により、接続点の手前において車両が接続方向に曲がるための挙動を示したと判断された場合に、警告動作実行部46により、所定の警告動作を実行する。
(もっと読む)
走行軌跡生成装置
【課題】 車両の走行軌跡を求める際に反復計算の途中で計算が頓挫して走行軌跡が求められなくなるという事態を防止することができる走行軌跡生成方法および走行軌跡生成装置を提供する。
【解決手段】 走行軌跡生成部12は、走行パターン記憶部14において、直進路、カーブ路のそれぞれに応じた走行パターンをあらかじめ記憶している。直進路走行軌跡生成部15では、直進路走行パターンおよび各センサ21〜25から送信される各種信号に基づいて、直進路における走行軌跡である直進路走行軌跡を生成する。カーブ路走行軌跡生成部16では、走行パターン記憶部14から読み出したカーブ路走行パターンおよび各センサ21〜25から送信される各種信号に基づいて、カーブ路における走行軌跡であるカーブ路走行軌跡を生成する。
(もっと読む)
走行支援システム、走行支援プログラム、及び走行支援方法
【課題】それぞれの走行支援処理の目的に応じた認識精度を確保しつつ、簡易かつ迅速に走行支援処理を実行することができる走行支援システムを実現する。
【解決手段】車両の走行支援に関する複数の支援処理APを実行可能な走行支援システム1。画像データ中に含まれる認識対象物の画像認識処理を行う画像認識部36と、画像認識処理の結果に基づいて動作する支援処理APのそれぞれについて当該支援処理APの実行のための要求認識精度に応じた画像データ中の設定認識領域の情報を記憶した認識領域情報記憶部73と、実行候補支援処理を抽出する候補処理抽出部31と、抽出された実行候補支援処理について、画像認識処理により認識対象物が認識された画像データ中の位置が当該実行候補支援処理についての設定認識領域内に含まれていることを条件として当該実行候補支援処理の実行を許可する支援処理実行管理部37と、を備える。
(もっと読む)
走行支援装置
【課題】ドライバーの視覚では認識できない危険を予想して、ドライバーに警告することが出来る運転支援装置の提供。
【解決手段】車両(C1〜C3)が走行中に、操舵角、ヨー角速度、横加速度が安全な値を超えた場合に、当該操舵角、ヨー角速度、横加速度を、安全な値を超えた時の時刻及び車両位置と関連付けられた状態で記憶する機能を有する記憶手段(22)と、記憶手段に記憶された操舵角、ヨー角速度、横加速度から、車両(C1〜C3)が走行している位置及び時間が、ドライバーの視覚では認識できない危険が発生する可能性が高い時刻及び位置であるか否かを決定する機能を有する解析・比較手段(23)を備えている。
(もっと読む)
表示装置及び表示方法
【課題】乗り物が走行中に振動した場合であっても、指示すべき地点を観視者に正確に認識させることができる表示装置を提供する。
【解決手段】生成部は、観視者に知覚させる指標のCG画像を、観視者の視点位置からみた風景に対応させた座標系を持つCG空間内において生成する。判定部は、乗り物が特定の場所を走行中であるか否かを判定する。提示部は、CG画像を観視者の眼に提示する。判定部における判定が真の場合、生成部は、形態を変化させた指標のCG画像を生成する。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】車両が走行している道路を正確に特定できない場合に、自動制御を実行することができなかった。
【解決手段】車両前方の所定距離以内に存在する複数の道路において同一の種類の車両制御を同一の制御目標で実行可能であるか否かを判定し、前記複数の道路において前記同一の種類の車両制御を前記同一の制御目標で実行可能である場合、前記複数の道路のうち、前記車両の走行道路の候補となっている道路において前記同一の種類の車両制御を実行する。
(もっと読む)
情報処理装置
【課題】道路の勾配を考慮した運転支援を行う。
【解決手段】情報処理装置1Aは、運転者による減速行動を検出する減速行動検出部21と、走行している道路の勾配情報を取得する勾配情報取得部22と、勾配情報を学習する勾配情報学習部23と、を備え、勾配情報学習部23は、減速行動検出部21により減速行動を検出した場合、所定の間、勾配情報取得部22により取得された勾配情報を学習する。
(もっと読む)
車両用運転支援装置
【課題】高速道路における車両の逆走をより正確に判断することを可能にする。
【解決手段】現在位置候補として、逆走状態であると判別されるものと逆走状態でないと判別されるものの両方が存在する場合において、フロントカメラ1で撮像した車両前方画像から、画像認識によって分岐点に特有な衝突緩衝装置を検出した場合には、車両が逆走状態であると判断し、高速道路における車両の逆走をより正確に判断することが可能になる。
(もっと読む)
車両用表示装置および車両用映像表示制御方法
【課題】狭路や狭い屈曲路を走行中に最も接触の危険性が高い車体部分を含んだ範囲の映像に自動的に切り替えて表示する車両用表示装置を提供する。
【解決手段】表示コントローラ11は、ナビゲーション装置13により取得した車両の現在位置周辺の道路地図情報、車両周囲センサ14により測定された車両周辺の障害物までの距離を用いて、狭路または屈曲路へ接近または進入したことを判別し、さらに、車両情報収集手段12により収集された車両情報を用いて、判別された狭路またはクランクにおける走行状況を識別し、車載カメラ15で撮影した車両周辺の映像の表示内容を指示する表示制御指令を出力することにより、カメラ映像切替装置16は、該表示制御指令の表示内容が指示する通り、仮想カメラの視点位置と視点方向と表示範囲とを変更した映像に切り替えて表示装置17へ表示する。
(もっと読む)
運転支援装置
【課題】カーナビゲーション装置のモニタ上に表示される注意情報を示す警告マークを、運転者に有用な情報として取得させることができるようにする。
【解決手段】ヒヤリハットの発生した位置を示す警告マークMをモニタの地図上に表示させるに際し、自車両Iの通過する季節、時間帯が、ヒヤリハットの発生した季節、時間帯と異なる場合(S13,S14)、警告マークMを表示させないようにする。
(もっと読む)
情報提供システムおよび情報提供方法
【課題】本発明は、ユーザに省エネルギー運転を行わせる際に、ユーザの運転負荷を低減することが可能な情報提供システムを提供する。
【解決手段】車両の位置情報および走行情報を取得する車両情報取得手段と、車両の位置情報および走行情報に基づいて、車両の走行経路を予測する予測手段と、予測手段により予測された走行経路における道路情報を取得する道路情報取得手段と、道路情報を所定のパラメータで表し、パラメータの変化量が所定範囲内にある走行経路内の区間を、演算区間として設定する設定手段と、設定手段により設定された演算区間ごとに、車両の駆動力を制御するための制御情報を生成する生成手段と、を有することを特徴とする情報提供システム。
(もっと読む)
脇見判定装置
【課題】運転者の脇見を適切に判定する。
【解決手段】脇見判定装置10のカーブ検出部26は、自車両から所定距離以内の前方におけるカーブの存在有無および当該カーブのカーブ方向を検出する。判定範囲変更部28は、カーブの存在が検出された場合に、車両状態取得部25により取得された自車両の旋回方向がカーブ方向に変化する以前に非脇見判定範囲をカーブ方向に所定角度θだけ変位させるようにして変更する。脇見判定部27は、視線方向検知部24により検知された運転者の視線方向と判定範囲変更部28により変更された非脇見判定範囲とに基づいて運転者が脇見状態であるか否かを判定する。
(もっと読む)
逆走報知装置、逆走報知方法及びプログラム
【課題】逆走する前に逆走のおそれがある旨を報知する。
【解決手段】制御部109は、GPS受信機101から取得した自装置の位置情報によって特定される位置に対応する道路種別及びリンク種別を地図DB108aから取得する。制御部109は、自装置の位置に対応する道路種別及びリンク種別が所定の組み合わせに変化した場合、自装置の位置情報を位置情報記憶部108bに記憶する。そして、制御部109は、位置情報記憶部108bに記憶された位置情報が示す位置から第1の距離以上離れた後、前記第1の距離より小さいか又は等しい第2の距離以内の範囲に移動した場合、表示部106、音声出力部107によって逆走のおそれがある旨を報知する。
(もっと読む)
車両用情報処理装置
【課題】 要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる車両用情報処理装置を提供する。
【解決手段】 車両用情報処理装置は、要減速地点の地図情報を記憶する地図情報記憶手段と、車両の位置を検出する車両位置検出部21と、車両の減速等操作を検出する減速等操作検出部24と、要減速地点の手前位置であって、減速等操作が行われた位置を学習する減速等操作位置学習部26と、を備え、減速等操作位置学習部26は、減速等操作が行われた位置の要減速地点からの離間距離に対応付けて、減速等操作を学習する。
(もっと読む)
車載情報取得装置
【課題】車載カメラの撮影画像から発光体の光を抽出して復調する技術において、撮影画像中から信号機の光の写っている輝点位置を従来よりも低い処理負荷で特定する。
【解決手段】カメラから取得した各撮影画像に対する信号輝度データ取得処理で、前回の取得処理で信号輝度データを取得していない場合、地図データから発光体の設置位置を取得すると共に車両の位置および向きを取得し(205)、取得した設置位置、車両1の位置、向きに基づいて、今回の撮影画像中の輝点位置を推定し(210)、推定した輝点位置の輝度を信号輝度データとして出力する(235)。また、前回の取得処理で信号輝度データを取得している場合、前回の信号輝度データ取得処理における輝点位置と、車両1の速度および旋回角速度に基づいて、今回の撮影画像中で発光体が写っている輝点位置を予測し(215)、予測した輝点位置の輝度を信号輝度データとして出力する(235)。
(もっと読む)
交差点情報取得装置、交差点情報取得方法及びコンピュータプログラム
【課題】交差点の属性を正確に特定することを可能にした交差点情報取得装置、交差点情報取得方法及びコンピュータプログラムを提供する。
【解決手段】交差点を走行する各車両4から交差点の通過態様をプローブ情報として取得し、取得した各車両4の交差点における通過態様毎に、該通過態様が示す車両4の通過する前後の交差点の他の車両4の通過態様に基づいて交差点の属性候補を対応付け(S21)、通過態様毎に対応付けられた交差点の属性候補の内で比率が最も高い種類の属性候補を、該交差点の属性に特定し(S22)、特定された交差点の属性に基づく走行支援を車両4で実行させるように構成する。
(もっと読む)
21 - 40 / 463
[ Back to top ]