
Fターム[2F129GG12]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 道路形態 (463)
Fターム[2F129GG12]に分類される特許
61 - 80 / 463
段差位置登録装置、方法およびプログラム
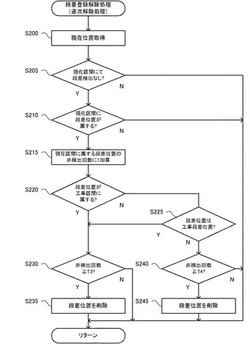
【課題】段差位置の登録されやすさを人為的な要因に応じて調整する技術を提供する。
【解決手段】段差位置登録装置であって、車両の走行時に段差が検出された回数を示す検出回数を車両走行路の位置ごとに取得する回数取得手段と、前記位置を段差位置として登録するための基準となる前記検出回数を示す検出回数閾値を、前記位置が工事区間に属するか否かに応じて設定する閾値設定手段と、前記検出回数が前記検出回数閾値に達した未登録の前記位置を前記段差位置として登録する登録手段と、を備える。
(もっと読む)
車両逆走検出装置

【課題】自車両の位置情報に誤差が含まれる場合において、運転手に対し誤って警告情報を報知する可能性を低減する。
【解決手段】一方通行の道路を自車両Vが走行しているときに自車両Vが道路の分岐点P11に近づいた場合、分岐点P11から延びる道路L11〜L14に道路領域R11〜R14を作成する。分岐点P11に流入する道路であって、自車両Vがいない道路L12には、車両の通行が禁止されている方向に走行していたら逆走していることを報知する道路領域である即時有効判定エリアを作成する。自車両Vが存在し、分岐点P11に流入する道路L11と、分岐点P11から流出する道路L13およびL14とには、自車両Vが通過した後に即時有効判定エリアに変化する通過待ち判定エリアR11、R13、およびR14を作成する。
(もっと読む)
道路交通情報提供システム及び方法
【課題】路線単位などの指定範囲の道路を対象として、気象を代表とする環境条件及びリアルタイムの道路交通状況を考慮した事故危険性などを判断するための危険レベル情報を提供できる道路交通情報提供システムを提供することにある。
【解決手段】道路上の指定範囲における道路交通上の危険レベルを判定する道路交通情報提供システムが開示されている。道路交通情報提供システムは、道路交通状況情報及び気象情報を考慮した危険レベルを判定する道路交通状況危険レベル判定部12を有する。道路交通状況危険レベル送信部14は、危険レベル情報をネットワーク1を介して外部に送信する。
(もっと読む)
運転アシストシステム
【課題】運転者が違和感を覚えることなく曲がるべきポイントを的確に把握することが可能な運転アシストシステムを提供する。
【解決手段】本発明は、車両のウインドシールド上に所定画像情報を重畳表示することによって、運転者に対する運転アシストを行う運転アシストシステムであって、前記画像情報における案内方向を示す矢印の太さを補正する補正手段を有することを特徴とする。
(もっと読む)
案内提供サーバ、方法、プログラムおよびシステム
【課題】車両の走行挙動に対応した走行支援機能を車載端末に実行させる技術の提供。
【解決手段】車両の走行挙動に関する複数の状況項目のそれぞれについての状況値を含む走行データを前記車両から取得し、前記走行データにおいて前記状況値が理想条件を満足しない前記状況項目を対象項目として特定し、前記対象項目についての前記状況値が前記理想条件を満足するための支援を行う走行支援機能を前記車両に備えられた車載端末に実行させるプログラムを対象プログラムとして特定し、前記対象プログラムを提示させる案内情報を前記車載端末に送信する。
(もっと読む)
加速度を決定するための自動車用システムおよび方法
【課題】加速度を決定する方法を可能な限り改善すること。
【解決手段】加速度を決定するための方法において、道路区画(i)は、現在位置(XGPS)に基づいて、地図データから決定され、複数の加速度値(a(t)、a1、a2)および/または複数の速度値(v(t)、v1、v2)は、道路区画(i)内において計測され、道路区画(i)内における道路区画(i)に関連付けられている加速度の確率分布の格納されたパラメータ(μn、Σn、σn)は、メモリから読出され、道路区画(i)内における加速度の確率分布の新たなパラメータ(μn+1、Σn+1、σn+1)は、読出されたパラメータ(μn、Σn、σn)から、および、複数の加速度値(a(t)、a1、a2)と複数の速度値(v(t)、v1、v2)とのうちの少なくとも1つから計算され、確率分布の新たなパラメータ(μn+1、Σn+1、σn+1)が格納される。
(もっと読む)
車両制御装置、車両制御方法及びコンピュータプログラム
【課題】道路に規定された規制内容を車両に遵守させる為の遵守支援を適切な状況で実施することを可能とした車両制御装置、車両制御方法及びコンピュータプログラムに関する。
【解決手段】車両が道路に規定された規制内容を遵守したか否か判定し、車両が規制内容を遵守していないと判定された場合に、遵守支援の内容や遵守支援の実施を取り止める為の遵守支援解除条件を設定するとともに履歴情報として交通違反履歴テーブル32に記憶し、交通違反履歴テーブル32に記憶された履歴情報に基づいて車両に対して遵守支援を実施するとともに(S14)、車両が遵守支援解除条件を満たした場合には履歴情報として記憶された遵守支援の内容と遵守支援解除条件を削除し、遵守支援の実施を取り止める(S23、S24)ように構成する。
(もっと読む)
運転アシストシステム
【課題】、効率的な運転アシストを行うことが可能な運転アシストシステムを提供する。
【解決手段】本発明の運転アシストシステムは、車両に搭載され車両の運転をアシストする運転アシストシステムであって、現在地、及び、現在地と目的地との間、及び、目的地に評価ポイントを設定する評価ポイント設定手段と、それぞれの評価ポイントにおいて、時間に応じて変動する第1評価関数を算出する第1評価関数算出手段(ステップS205)と、少なくとも前記第1評価関数を含む累積評価関数を算出する累積評価関数算出手段(ステップS206)と、前記目的地における評価ポイントの累積評価関数が最大となるように運転アシスト動作(ステップS209)を行う運転アシスト手段と、を有することを特徴とする。
(もっと読む)
車両のナビゲーション装置
【課題】現在位置測位精度に基づく態様で一時停止案内を行う。
【解決手段】ナビゲーション装置は、地図データ上で車両が走行する経路を走行予定経路として算出する。走行予定経路上に一時停止すべき場所が存在し、該現在位置と該一時停止すべき場所の間に、車両が現在位置する道路が、複数の分岐道路に分岐する分岐点が存在すると判断した場合、一時停止すべき場所が存在する分岐道路のそれぞれについて、該分岐道路と、該車両が現在位置する道路との間の角度αと、該分岐道路の、前記一時停止すべき場所が存在しない一つまたは複数の分岐道路に対する角度のうちの最小値Bと、該車両が現在位置する道路の幅員と、前記複数の分岐道路のうちの最も大きい幅員と、の少なくとも一つに基づいて、該一時停止すべき場所についての案内が誤案内となる可能性の程度を表す評点を算出する。該算出された評点の大きさに応じて、一時停止案内の報知形態を変更する。
(もっと読む)
減速制御装置、方法およびプログラム
【課題】運転者が煩わしさを感じることを抑制すること。
【解決手段】車両の前方の状況に基づいて前記車両を停止させるべき停止要因を特定し、前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存しない場合には、所定の制動期間で前記車両を停止させる第1減速制御を実行対象減速制御として選択し、前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存する場合には、前記第1減速制御よりも制動期間が短い第2減速制御を実行対象減速制御として選択し、前記実行対象減速制御を実行して前記停止要因に応じた停止位置にて前記車両を停止させる。
(もっと読む)
衝突予測装置
【課題】低コストで精度の高い衝突予測を可能とする衝突予測装置を提供する。
【解決手段】車両に搭載され、当該車両と障害物との衝突を予測する衝突予測装置であって、車両の周囲に電磁波を送信し、障害物から反射された当該電磁波の反射波を受信することによって当該障害物を検出する障害物検出手段と、障害物が検出された場合、車両と障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、高さの異なるフロアを往来するためのスロープを備えた建築造成物内において当該スロープ上を車両が走行している可能性が高いか否かを判定するスロープ走行判定手段と、車両がスロープを走行している可能性が高いと判定された場合、衝突判定手段の判定感度を車両がスロープを走行している可能性が高いと判定されていない場合に比べて低減する感度変更手段とを備える、衝突予測装置。
(もっと読む)
道路標示認識装置及び道路標示認識方法
【課題】走行している車線が特定車線か否かを正確かつ高速に判定することのできる「道路標示認識装置及び道路標示認識方法」を提供すること。
【解決手段】道路標示認識装置は、カメラと、カメラで撮影された画像を基に、車線マークを検出する車線マーク検出部と、カメラで撮影された画像を基に、特定の道路標示を検出する特定道路標示検出部と、自車両の走行距離を算出する走行距離算出部と、所定の距離を走行するまでに、自車両が走行する車線に特定の道路標示を検出したときに、自車両が特定の車線を走行していると判定する特定道路標示存在判定部と、を備える。車線マーク検出部は、自車両が走行している車線の右側の車線マーク及び左側の車線マークを特定し、特定道路標示存在判定部は、特定の道路標示の位置が右側の車線マークの位置と左側の車線マークの位置の間であるとき、自車両が特定の車線を走行していると判定する。
(もっと読む)
安全運転診断装置
【課題】交差点において安全確認をしていないにもかかわらず安全確認をしたと誤判定すること、及び安全確認をしたにもかかわらず安全確認をしていないと誤判定することを低減することができる安全運転診断装置を提供すること。
【解決手段】自車両Cが交差点の進入位置から2[m]より長く進入した時点以前の5[s]間の水平角信号をサンプリングする(S10〜S16)。また、その5[s]前の前後における水平角の平均の絶対値を算出して、その絶対値が所定値以上である場合は、サンプリング部13aにてサンプリングした水平角信号を加工する(S17、S18)。そして、サンプリングした水平角信号からパワースペクトルを計算すると共に、0.2〜1.5Hzにおけるパワーの極大値の総和を計算して、この総和と判定値を比較して、ドライバによる安全確認がなされたか否かを判定する(S19〜21)。
(もっと読む)
位置補正装置及び方法、並びに運転支援装置
【課題】自動車等の車両の走行位置を正しい位置に補正する。
【解決手段】位置補正装置(100)は、運転者の減速行動を車両が走行している場所情報と関連づけて学習する学習手段(120)と、学習された減速行動のうち、場所情報が同じであればバラツキが所定の範囲内となる行動を特徴点として抽出する抽出手段(150)と、場所情報が同じである地点を走行する場合に、運転者の特徴点を検出する検出手段(140)と、検出された特徴点及び学習された減速行動から抽出された特徴点を互いに比較することで、車両の位置補正を行う補正手段(160)とを備える。
(もっと読む)
経路作成装置
【課題】演算時間と信頼性の双方を考慮して適切な走行経路を作成すること。
【解決手段】経路作成装置1は、開始点から目標点までの車両の走行経路を作成する装置である。この経路作成装置1は、空間上の経路を全探索することにより走行経路を作成する第1作成部17aと、空間上から確率的に抽出された点に基づいて設定されたノードを順次接続することで走行経路を作成する第2作成部17bと、車両の状況又は該車両の周辺の状況を検出する手段(障害物検出装置11や白線検出装置12など)と、検出された状況に基づいて第1作成部17a及び第2作成部17bのいずれか一方を走行経路を作成するための手段として選択する選択部17cと、を備えることを特徴とする。
(もっと読む)
運転支援装置
【課題】車線変更の開始時点を迅速に且つ精度良く推定することができる運転支援装置を提供すること。
【解決手段】運転支援装置1では、車線変更推定部13は、ウィンカーセンサ3によってウィンカーONが検出された第1の時点における曲率変化速度が基準曲率変化速度以上である場合、曲率変化速度が基準曲率変化速度であった第2の時点を車線変更開始時点と推定するため、車線変更開始後にウィンカーが操作された場合であっても、その操作の遅れを考慮して車線変更の開始時点を精度良く推定できる。また、ウィンカーONが検出された時点で既に得られている走行情報により車線変更の開始時点を推定するため、車線変更の開始時点を迅速に推定できる。
(もっと読む)
情報提示装置
【課題】精度がより高く、且つ、実施がより容易であるとともに、コスト的な無駄をより抑えることを可能にしながらも、ドライバにとっての快適性をより損ないにくい情報提示装置を提供する。
【解決手段】注意喚起表示や警告表示にドライバが気づいたか否かの判定を行う行動判定部30を備え、情報提示制御部27は、行動判定部30で肯定判定を行ったことをもとに、注意喚起表示や警告表示の減衰表示への変化を表示部21に行わせ、行動判定部30は、表示部21に表示された注意喚起表示や警告表示にドライバが気づいた場合にドライバが行うスイッチ操作や運転操作によって生じる信号であるドライバ行動確認情報や車両情報をもとに上述の判定を行う。
(もっと読む)
経路作成装置
【課題】演算時間と精度の双方を考慮して適切な走行経路を作成すること。
【解決手段】経路作成装置1は、ノードを繋ぐ線分を順次接続することにより開始点から目標点までの車両の走行経路を作成する装置である。この経路作成装置1は、少なくとも開始点を含むノードの群のうちの一点からステップサイズで示される距離内に存在する新たなノードを設定する処理を、目標点から所定の範囲内にノードが設定されるまで繰り返し実行し、設定されたノードを繋ぐ線分を順次接続することにより走行経路を作成する作成部17bと、車両の状況又は該車両の周辺の状況を検出する手段(障害物検出装置11や白線検出装置12など)と、検出された状況に基づいてステップサイズを決定するステップサイズ決定部17aと、を備えることを特徴とする。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】 自車前方に存在する走行規制に対し注意を喚起する「運転支援装置、運転支援方法および運転支援プログラム」を提供する。
【解決手段】 本発明の運転支援装置は、自車Mが走行している道路前方に存在する一時停止60、62に関する情報を配信装置30からの無線により受信する受信手段と、自車前方を撮像する撮像カメラと、撮像データに基づき自車前方の視界の良否を判定する判定手段と、自車前方の視界が不良であると判定されたとき、一時停止が存在することを知らせる警報を提示する提示手段とを有する。
(もっと読む)
運転支援装置及びプログラム
【課題】地図情報や位置情報に問題がある場合でも、市街地等の目的とするエリアを精度良く判定して、そのエリアに対応した好適な制御を行うことができる運転支援装置及びプログラムを提供すること。
【解決手段】ステップ140では、自車両と歩行者との横位置(横方向における距離)が近いか否かを判定する。ステップ150では、歩行者の数が多いか否かを判定する。前記ステップ140及びステップ150で肯定判断されて進むステップ170では、自車両が市街地を走行していると判断して、安全のために、車速を制限する制御を行う。ステップ160では、自車両と歩行者との横位置が遠く、また、自車両の前方の歩行者の数が少ないので、市街地でなく、市街地から外れた一般道路であると判断して、一般道路に適した制限車速に設定する。
(もっと読む)
61 - 80 / 463
[ Back to top ]