
Fターム[2F129GG12]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 道路形態 (463)
Fターム[2F129GG12]に分類される特許
101 - 120 / 463
運転誘導装置
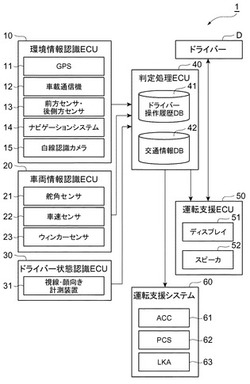
【課題】潜在的な危険に対する安全性をより向上させ、有益な情報を提供することが可能な運転誘導装置を提供する。
【解決手段】判定処理ECU40が、自車両V0の通過領域である移動領域TRと、自車両V0の周辺に潜在的に存在する移動体V1等について、移動体V1等の通過領域である移動領域TRを予測する。判定処理ECU40は、予測した自車両V0と移動体V1等との移動領域TRとの重複領域に基づいて、移動領域TRの重要度Iを算出するため、潜在的な危険に基づいて自車両V0が通過する領域における運転の難易度を算出できる。判定処理ECU40は、算出した重要度IとドライバーDの運転技量Tとに応じて自車両V0が将来走行すべき経路を設定し、運転支援ECU50が設定した経路にドライバーDを誘導するため、潜在的な危険に対する安全性をより向上させ、有益な情報を提供することが可能となる。
(もっと読む)
分岐路進入判断装置及び分岐路進入判断方法

【課題】自車両が分岐路に進入したことを確実に検出することができる分岐路進入判断装置等を提供する。
【解決手段】自車両の前方方向に分岐路が存在することを検出した場合に、単眼カメラ3により撮像した撮像画像に基づいて、カメラコントローラ4により認識された右側白線認識結果と左側白線認識結果との組み合わせから、コントローラ10が、自車両が分岐路に進入したと判断する。自車両が分岐路に進入した場合に、ナビゲーション装置2の位置補正部2dにより位置を補正できる。
(もっと読む)
車両位置演算装置及び車両位置演算方法
【課題】低コスト化を実現できる車両位置演算装置を提供する。
【解決手段】複数車線道路のうち、一の車線を走行する自車両の位置を計測する自車両位置計測手段と、複数車線道路のうち、他の車線を走行する他車両を検出するセンサ11と、センサ11の検出信号に基づき、自車両に対する他車両の方位を演算する他車両方位演算手段と、一の車線と他の車線との間隔を特定する車線間隔特定手段と、自車両の位置、他車両の方位及び間隔に基づいて、他車両の位置を演算する他車両位置演算手段を有する。
(もっと読む)
車両用運転支援装置
【課題】運転者による自発的な安全運転の実行を適切に促す。
【解決手段】車両用運転支援装置10は、適切運転検出部22又は危険運転検出部23により各運転動作が検出された場合に、この検出時前後の所定時間に亘って車両状態センサ13により検出された車両情報を記憶する車両情報記憶部24と、適切運転検出部22により適切な運転動作が検出された場合のみに適切な運転動作に対する報知を行なう報知制御部26と、適切運転検出部22により適切な運転動作が検出された場合に、車両情報記憶部24に記憶された車両情報に基づき、自車両の運転終了後において、適切な運転動作の回顧を支援する適切運転回顧支援部25と、危険運転検出部23により危険な運転動作が検出された場合に、車両情報記憶部24に記憶された車両情報に基づき、自車両の運転終了後において、危険な運転動作の回顧を支援する危険運転回顧支援部27とを備える。
(もっと読む)
ナビゲーション装置及びその表示方法
【課題】 従来、ナビゲーション装置において、燃費が悪化する要因となる運転操作を検出すると、その運転操作による実際の燃料消費量から当該運転操作が無かった場合の燃料消費量を減算した結果を無駄な燃料消費量として算出し、計測を開始してから経過した時間に応じて燃料消費量を示す技術がある。しかし、運転の改善を行うためには、運転者は、走行した際に無駄な運転操作があった道路を経過時間から解釈せねばならず、これは困難を伴う。
本発明の目的は、ナビゲーション装置において、より容易に運転の改善に結びつけうるように、エネルギー消費に関する情報を表示する技術を提供することにある。
【解決手段】
本発明のナビゲーション装置は、走行した場所に関連づけて、自車のエネルギー消費量がエネルギー消費量の基準値を超過したことを表示する。
(もっと読む)
道路形状認識装置
【課題】車両の進行方向前方に存在する道路の道路形状を正確に認識することができる道路形状認識装置を提供する。
【解決手段】道路形状認識装置1は、車両の進行方向前側を撮像した画像に基づいて道路の道路領域を検出し、その道路領域に基づいて道路の形状を推定する。これにより、道路形状を近傍から遠方まで正確に認識することができる。
(もっと読む)
走行制御装置
【課題】退出路の手前で退出の意図が検出されても減速を開始せず、退出路の先頭位置を通過してから減速を行う走行制御装置を提供する。
【解決手段】走行制御装置1は、本線110から退出路120への退出意図を検出し、車両2が退出路120の先頭位置123を通過したか否かを判断し、退出意図が検出されかつ車両2が退出路120の先頭位置123を通過したと判断された場合に車速制御部50により減速制御を行わせる。
(もっと読む)
運転支援システム
【課題】無駄な運転支援の実施を抑制することができる運転支援システムを提供する。
【解決手段】 運転支援システム1は、路側機2と送受信を行う送受信部5と、自車両のドライバの自宅付近や会社付近において状態案内サービスを実施するか否かを設定入力するための設定入力部6と、ECU8とを備えている。ECU8は、設定入力部6により状態案内サービスのON/OFFが設定入力されると、そのON/OFFデータをサービス設定情報として記憶する機能と、送受信部5により路側機2からの情報を受信すると、サービス設定情報を読み出し、サービス設定情報がONであるときは、音声等によりサービス対象地点の状態案内サービスを実施するようにUI部9を制御し、サービス設定情報がOFFであるときは、状態案内サービスを実施しないようにする機能とを有する。
(もっと読む)
交通監視ポイント検出装置及びプログラム
【課題】 周囲に存在する交通監視ポイントを検出し、それに関する適切・有益な情報を報知することで、安全運転に寄与することのできる交通監視ポイント検出装置を提供すること
【解決手段】 自車の位置を検出するGPS受信機と、交通監視ポイントの位置情報を記憶するデータベースと、GPS受信機で検出された現在位置情報と、データベースに格納された交通監視ポイントの位置情報とに基づき、警報対象の交通監視ポイントを抽出し、抽出された交通監視ポイントについての警報を表示部のメイン表示領域R1に描画出力する制御部と、を備える。交通監視ポイントが非常設の場合、頻度情報を関連づけて記憶し、制御部は、抽出された交通監視ポイントに関連づけられた頻度情報が基準値に満たない場合、正規の警報をしない制御を行う。
(もっと読む)
信頼度評価装置、信頼度評価方法および信頼度評価プログラム
【課題】地図情報が示す地物の位置等を測定した場合の測定値の分布特性に応じた信頼度の評価を行うことができなかった。
【解決手段】車両に搭載された記録媒体に記録された地図情報から信頼度の評価対象となる評価対象値を取得し、前記車両に搭載されたセンサによって前記評価対象値を測定するための測定値を複数回取得し、前記評価対象値の信頼度を前記測定値に基づいて評価する信頼度評価法を前記測定値の分散に応じて選択し、選択した前記信頼度評価法によって前記評価対象値の信頼度を評価する。
(もっと読む)
道路情報特定方法、道路情報特定装置、ナビゲーションシステム、道路情報を特定するためのコンピュータプログラム及びそのコンピュータプログラムを記録した記録媒体
【課題】一時停止の中でも、警告が真に必要な一時停止が付された交差点進入道路を特定し、当該進入道路ついての道路情報を自動的に作成する方法及びその装置を提供する。
【解決手段】一時停止情報の付された交差点への進入道路を抽出し、
交差点ごとに当該各進入道路につき、退出道路以外の道路に車輌不在のとき、他の道路(退出道路を含む)から進入する他の車輌の全進路と当該進入道路の車輌の退出進路との交差点における交差の有無を評価し、当該他の車輌の進路と当該進入道路の車輌の進路との交差が認められないとき、該進入道路を特定する。
(もっと読む)
運転支援装置及びプログラム
【課題】交差点の通過に伴う運転動作に関する評価を行う運転支援装置及びプログラムを提供する。
【解決手段】運転支援装置は、交差点に進入する前に走行した進入車線を特定し、進入車線に対応づけられる交差点を退出した後に走行すべき走行予定道路を特定する。また、交差点を退出後に走行した退出道路を特定し、退出道路と走行予定道路とが一致しない場合(S206:NO)、交差点に進入する進入動作を危険動作であると判定する(S207)。これにより、退出道路と走行予定道路とが一致しない場合、交差点に進入する進入動作を危険動作と判定するので、交差点の通過に伴う運転動作を適切に評価することができる。
(もっと読む)
道路情報提供装置およびナビゲーション装置
【課題】運転者が配送時間や荷物への影響を考慮せずに安全に走行できるように、路面の凹凸状態を路面情報として情報提供を行うことが可能な道路情報提供装置およびナビゲーション装置を提供する。
【解決手段】道路利用者に道路情報を提供する道路情報提供装置において、車両Aを走行させたときの路面の凹凸状態を、その車両Aの位置情報および走行車線情報と共に路面情報として記憶する路面情報記憶部2と、任意の車両Bからの要求により、路面情報記憶部2に記憶された路面情報をその車両Bに送信する送信手段3とを備えたものである。
(もっと読む)
運転支援装置
【課題】よりドライバーに違和感を与えずに運転支援を行なうことが可能な運転支援装置を提供する。
【解決手段】信号機の点灯状態に関する信号機情報を取得する通信装置104と、通信装置104が取得した信号機情報に基づいた最初のサービスを実行可能であり、最初のサービスの実行後に、信号機情報に基づいた後続のサービスを実行可能なインフラ協調ECU110とを備えた運転支援装置100において、インフラ協調ECU110は、第最初のサービス及び後続のサービスの内のいずれか一方を実行しないときは、もう一方のサービスも実行しないため、一部の種類の情報提供しかなされずに、期待していた他の種類の情報提供が行われないといったドライバーに違和感を与える事態を防止できる。
(もっと読む)
走行車線検出装置
【課題】後視カメラの画像により現在の走行車線を検出する装置では、車線変更しても後視カメラの画像にそれが表れるのにタイムラグがあり、車線変更の検出遅れが生じるので、後視カメラの画像を利用しても検出遅れの生じない「車線変更検出装置」を得る。
【解決手段】後視カメラの撮影画像により走行車線を検出している時、車線境界線の傾斜角を測定し、車線境界線が所定以上傾斜したことを測定し検出した時、測定した傾斜角と、車速と、測定の開始時からの経過時間とにより、車両が横方向に移動した距離を演算し、この横方向移動量が所定距離以上の時には、後視カメラで車線の移動を検出しなくても、車両が車線を変更したと判断し、走行車線の表示を変更する。このとき予めデータベースから右折レーンにより車線が増加する等のデータを入力しておくと、そのタイミングで前記横移動が発生すると、走行車線が移動したものとしてより早く先読みできる。
(もっと読む)
運転診断装置および運転診断方法
【課題】 適切に運転診断を行なえる装置を提供する。
【解決手段】 運転診断装置10は、車両に搭載された車載装置20から、運転中のドライバのワークロードのデータと、そのワークロードのデータを取得したときに走行していた位置データとを受信する通信部11と、複数の車載装置20から受信したワークロードのデータに基づいて、各道路区間におけるワークロードの基準データを求める基準データ算出部15と、診断対象の車両の車載装置から受信したワークロードのデータと基準データとを比較することにより、診断対象の車両のドライバの運転を診断する運転診断部17とを備える。
(もっと読む)
標識認識装置
【課題】認識した道路標識の有効範囲を正しく判定して、運転者への正確な道路標識の提示を可能とする標識認識装置を提供する。
【解決手段】標識及び補助標識が示す有効道路区間数、距離、有効時間帯、車両状態の条件等の有効範囲条件を予め格納している標識有効範囲データ記録部7と、車両前方を撮像した道路画像を用いて、標識と補助標識を認識する標識認識部2と、車両の現在位置、車種、状態等を示す車両情報を取得する車両情報取得部4と、車両周辺の地図情報を取得する地図情報取得部3と、標識有効範囲データ記録部7の有効範囲条件、車両情報及び地図情報を用いて、当該車両が、標識認識部2で認識した標識と補助標識で指定された有効範囲にいるか否かを判定する標識有効範囲判定部5を備える。
(もっと読む)
運転評価装置、運転評価システム、運転評価方法
【課題】より効果的に省燃費運転及び安全運転を含む模範運転を運転者に励行させることを啓蒙することができる運転評価装置、運転評価システム、運転評価方法を提供すること。
【解決手段】本発明による運転評価装置1は、出発地と目的地を結ぶ経路が含む部分経路を車両が所定頻度以上走行したか否かを判定する判定手段2cと、判定手段2cが肯定と判定する場合に部分経路を評価区間に設定する設定手段2dと、評価区間において車両の走行情報を取得する取得手段2eと、走行情報に基づいて車両の模範運転の励行度合を評価する評価手段2fを含むことを特徴とする。
(もっと読む)
情報表示装置、情報表示方法、及びプログラム
【課題】曲折時に運転者が気を取られることのないよう、画面の表示制御を行うことが可能な情報表示装置、情報表示方法、及びプログラムを提供する。
【解決手段】情報を表示する表示手段と、自車位置情報を取得する自車位置情報取得手段と、操舵装置の舵取り操作量を検出する検出手段と、を備え、操舵装置により舵取り操作可能に構成された車両に搭載される情報表示装置のコンピュータを、自車位置情報取得手段により取得された自車位置情報に基づいて自車が交差点に差しかかったか否かを判定し、自車が交差点に差しかかったと判定された場合に検出手段により検出された舵取り操作量が予め定められた値以上となったか否かを判定し、検出された舵取り操作量が予め定められた値以上となったと判定された場合に表示手段の表示を消去する制御手段、として機能させる。
(もっと読む)
車載装置及び車両認識方法
【課題】周辺の車両に関する情報を取得する処理を軽減することができる車両認識方法及び車載装置を提供する。
【解決手段】運転支援装置1のCPU2は、車両に設けられた周辺監視カメラ20から周辺撮像データを取得する。また、画像プロセッサ10は、周辺撮像データ内で、隣接車線領域を設定し、隣接車線領域内に認識部分枠を設定する。さらに、画像プロセッサ10は、認識部分枠内の輝度データと、後方監視カメラ21により撮像された後方撮像データのサンプル枠内の輝度データとを比較し、路面上の物体を検出する。そして、検出物ありと判断された認識部分枠とその周辺に対し、エッジ検出を行って、他車両を認識する。
(もっと読む)
101 - 120 / 463
[ Back to top ]