
Fターム[2F129GG17]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援機器 (2,561) | 撮像機器 (2,058)
Fターム[2F129GG17]に分類される特許
61 - 80 / 2,058
ナビゲーション装置およびこれを備えたナビゲーションシステム
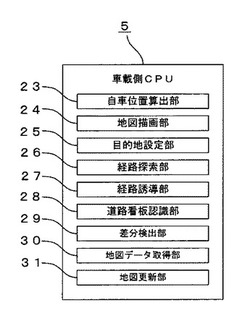
【課題】自車の地図情報が古い場合であっても、カメラによって取得された道路看板を、最新の地図情報を反映した経路誘導にすみやかに活用できる「ナビゲーション装置およびこれを備えたナビゲーションシステム」を提供すること。
【解決手段】前方撮像用のカメラ7と、これの撮像画像に基づいて道路看板を認識する道路看板認識手段28と、これによって経路誘導中に認識された道路看板を、対応する看板情報と比較して差分を検出する差分検出手段29と、前記差分の検出を契機に、自車位置と目的地との間の所定の領域に該当する地図情報記憶手段8に記憶されていない最新の地図情報をサーバ2から取得する地図情報取得手段30とを備え、地図情報取得手段8によって取得された最新の地図情報を、最適経路の再探索および経路誘導に利用すること。
(もっと読む)
除雪支援システム及び除雪車

【課題】 無積雪時の実写映像に基づき障害物等の構造物と除雪車との位置関係を目視上及び座標計算上で正確に把握することによって、容易に且つ安全に除雪作業を行うことができる除雪支援システムの提供。
【解決手段】 無積雪時に撮像手段1aで同時取得した全方位の実写映像を、映像取得時の車両Aの絶対座標系における車両座標及び移動方向等と結び付けて記録する映像記録手段1と、車両座標、並びに所望の視線から導かれる移動方向等に対応する実写映像を前記映像記録手段1から読み出し表示フレームFに出力する映像出力手段4と、映像記録手段1から読み出した実写映像に含まれる特徴点の絶対座標を当該映像記録手段1から読み出し絶対座標系の三次元モデルを作成する構造物記録手段5を備える除雪支援システム。
(もっと読む)
位置判定装置およびナビゲーション装置並びに位置判定方法,プログラム
【課題】車両の地図上の位置をより適正に判定する。
【解決手段】車載カメラから撮影される風景画像と複数の参照データとが一致しているか否かを判定するマッチング処理により一致していると判定された参照データに対応する撮影位置に基づいて車両の現在位置である自車位置を判定するものにおいて、マッチング処理は、車載カメラから撮影される風景画像に対して特徴点を抽出する所定の画像処理を施して得られる判定用データと参照データとの一致率Mが判定用閾値Mref以上のときに一致していると判定し、一致率Mが判定用閾値Mref未満のときに一致していないと判定することにより行なわれ(S210)、判定用閾値Mrefは、車速Vが大きいほど小さくなるように且つハンドル操舵量Stが大きいほど小さくなるように調整されている(S130)。これにより、判定用データと参照データとが一致していると判定されやすくすることができる。
(もっと読む)
車両用表示処理システムおよび車両用表示処理方法並びにプログラム
【課題】表示部に表示させたい風景画像をより容易に指示可能とする。
【解決手段】車載カメラにより連続的に撮影された風景画像を取得し、風景画像のそれぞれを撮影時刻に関連付けて画像データDBに記憶させ、風景画像の撮影開始から撮影終了までの撮影時間に対応するタイムバー72と、タイムバー72上の位置をユーザにより指示可能に示すスライダー73と、風景画像を撮影した際の走行経路沿いに存在するランドマークをタイムバー72上の対応する位置にて示すランドマークアイコン74a〜74dと、を含む指示表示画像71をディスプレイに表示させ、さらに、風景画像のうちタイムバー72上のスライダー73の位置に対応する撮影時刻に関連付けられた風景画像をディスプレイに表示させる。これにより、走行経路上のランドマークの時系列的な位置を把握した状態で表示する風景画像を指示可能となる。
(もっと読む)
電力送受電システム
【課題】電力の過不足が生じる時に、電力の送受電を行う対象車両が、極力、互いに無駄なルートを走行せずに出会うことができるように、充電要求車両と放電要求車両とのペアリングを行う電力送受電システムを提供する。
【解決手段】情報センター13が、データベース43に、充電要求車両と放電要求車両とに分類しつつ、各車両の現在位置、進行方向及び目的地に関する情報を記録しておく。従って、データベース43に記録された情報に基づいて、各車両が、将来、走行する道路を予測することができる。このため、同時期に共通のエリアを走行し得る充電要求車両と放電要求車両とをペアリング車両として抽出することが可能になる。この結果、ペアリングされる充電要求車両及び放電要求車両とも、極端な迂回ルートを取らずに、送受電を行う相手車両に出会うことが可能になる。
(もっと読む)
位置判定装置およびナビゲーション装置並びに位置判定方法,プログラム
【課題】車両の地図上の位置をより適正に判定する。
【解決手段】道路上で走行方向に間隔をもって車載カメラから撮影された風景画像の特徴点を抽出して得られる複数の参照データをそれぞれ対応する撮影位置と関連付けて参照データDB44に記憶しておき、車載カメラから撮影される風景画像と複数の参照データとが一致しているか否かを判定するマッチング処理を行ない、マッチング処理により一致していると判定された参照データに対応する撮影位置に基づいて自車位置を判定するものにおいて、隣接する参照データの道路上の参照データ間隔Dは、道路の幅員が小さいほど短くなるように調整されてなる。これにより、マッチング処理により判定用データと参照データとが一致していると判定される機会を増やすことができる。
(もっと読む)
停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラム
【課題】路面に形成された停止線を適切に検出することを可能にした停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラムを提供する。
【解決手段】停止線を認識対象とした高精度ロケーションシステムを用いて、停止線の候補となる地物(停止線候補)を検出した場合に、車両の走行する道路の路面色が変更した変更地点よりも進行方向側に停止線候補の路面標示を検出し、且つ該変更地点から車両の進行方向の所定距離以内に停止線候補の路面標示を検出した場合に、該停止線候補を停止線と特定するように構成する。
(もっと読む)
参照データ取得装置、参照データ取得システム、参照データ取得方法、及び参照データ取得プログラム
【課題】参照データの取得に要する通信コストの増大を抑制しつつ、必要な参照データを確実に取得することができる、参照データ取得装置を提供すること。
【解決手段】参照データ取得装置50は、車両2の現在位置から所定範囲内に存在するマッチング地点を含む施設を特定するマッチング地点特定部51aと、マッチング地点特定部51aにより特定された施設における通信状態を特定する通信状態特定部51bと、通信状態特定部51bにより特定された通信状態が良好な施設については、当該施設への進入路に存在するマッチング地点に対応する参照データのみを当該施設への進入前に取得し、通信状態が良好ではない施設については、当該施設への進入路に存在するマッチング地点に対応する参照データと、当該施設からの退出路に存在するマッチング地点に対応する参照データとを当該施設への進入前に取得する、参照データ取得部51cとを備える。
(もっと読む)
カメラシステム
【課題】カメラシステムのカメラ装置と受信装置の両方にOSDの描画機能が付いていた場合に、システム上で動作させるアプリケーションに応じて、OSDの描画機能のON/OFFを調整する。
【解決手段】カメラ装置は、画像にOSDによる表示要素を描画するOSD描画部と、OSD描画部を制御するOSD制御部とを備えている。カーナビゲーション装置などの受信装置は、OSD描画部と、OSD制御部とを備えており、バックミラーなどの受信装置は、OSD描画部と、OSD制御部とを備えていない。カーナビゲーション装置などの受信装置のOSD制御部は、カメラ装置のOSD制御部に対して、OSD機能をON/OFFを制御するOSD制御情報を送信し、カメラ装置は、それに従ってOSDによる表示要素を重畳した画像をカーナビゲーション装置に送信する。
(もっと読む)
停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラム
【課題】路面に形成された停止線を適切に検出することを可能にした停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラムを提供する。
【解決手段】停止線を認識対象とした高精度ロケーションシステムを用いて、停止線の候補となる地物(停止線候補)を検出した場合に、進行方向別通行区分の路面標示よりも進行方向側に停止線候補の路面標示を検出し、且つ最も分岐点側にある進行方向別通行区分の路面標示から車両の進行方向の所定距離以内に停止線候補の路面標示を検出した場合に、該停止線候補を停止線と特定するように構成する。
(もっと読む)
車両用無線通信装置および通信システム
【課題】車車間通信によって情報を送信する場合に、輻輳を抑えながらも、情報を必要に応じた頻度で送信することを可能にする。
【解決手段】自車両の直近の後続車両に搭載される無線通信装置1から受信したセンサ状態情報が、「搭載有」且つ「検出成功」の場合には、自装置から情報を送信する送信周期を基準間隔よりも長くする一方、当該センサ状態情報が「搭載無」や「搭載有」且つ「検出失敗」の場合には、送信周期を基準間隔とするように制御部12で送信周期を制御する。
(もっと読む)
情報提供装置
【課題】ユーザによる情報の入力回数を抑制することができる情報提供装置を提供する。
【解決手段】少なくとも車両100の速度を含む車両情報を検出する車両情報検出手段と、地図データ上でPOI情報を管理するデータベース7と、車両情報検出手段により検出された車両情報に基づいて、車両100が接近した車両接近場所を特定する接近場所特定手段と、車両接近場所に含まれるPOI情報からユーザの要求を推定する要求推定手段と、データベース7に含まれるPOI情報から、要求推定手段により推定されたユーザの要求と関連するPOI情報を検索するPOI情報検索手段と、POI情報検索手段により検索された検索結果をユーザに報知する報知手段とを備える。
(もっと読む)
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム
【課題】右左折後の移動体の位置を迅速且つ正確に検出することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
【解決手段】車両が分岐点で右左折したことを検出した場合に、高精度ロケーションシステムによって横断歩道を認識したか否か判定し(S14)、横断歩道を認識した場合に、対向車線の停止線の位置に基づいて右左折後の車両の詳細な現在位置を検出(又は既に検出された位置を補正)する(S15)ように構成する。
(もっと読む)
案内システム、電子看板、撮影装置、および制御装置
【課題】電子看板を用いて、ユーザを所望の目的地まで容易に到達させることができる案内システムを提供することである。
【解決手段】カメラ装置は、電子看板に表示された記号を含む画像を撮影する(S21)。そして、撮影した画像から、記号に含まれる図形および文字を認識して(S22,S23)、現在地を認識する。カメラ装置は、現在地と目的地とが、同一の階であるか否かを判断する(S24)。ここでは、同一の階であるため(S24において、NO)、現在地と目的地とを直線で結んだ仮経路を作成し(S28)、仮経路に基づいて、現在地から目的地までの地図情報に沿った実際の経路を導き出す(S29)。そして、導き出した経路をユーザに案内する(S27)。そして、カメラ装置が、「右手に進み、すぐ左側です」と報知することによって、ユーザを道案内する。
(もっと読む)
駐車場所情報提供装置及び駐車場所情報提供方法
【課題】目的地に近い駐車場所の情報だけでなく、ユーザーに歩行の機会を与える駐車場所の情報をも提供することを目的としている。
【解決手段】駐車場所検索部45は、予め設定された目的地の情報と、地図データベースとに基づき、目的地に対して予め設定された近距離条件に合致する駐車場を通常駐車場として検索する。更に、駐車場所検索部45は、予め設定された歩行条件に合致しかつ通常駐車場よりも遠い位置に存在する駐車場を歩行用駐車場として検索する。駐車場所情報提供部46は、通常駐車場の情報をユーザーに対して提供することに加えて、歩行用駐車場の情報をユーザーに対して提供する。
(もっと読む)
運転支援装置
【課題】車線変更を考慮した適切な走行ができるように運転を支援する。
【解決手段】自車両が走行する道路の車線変更規制区間の情報を含む道路情報を取得する道路情報取得手段14と、道路情報取得手段14により取得された車線変更規制区間の情報に基づいて、自車両の走行地点の前方所定距離内に車線変更規制区間の起点又は終点が存在するか否かの判定を行う判定手段20eと、判定手段20eにより起点又は終点が存在すると判定されたら起点又は終点の情報を報知する報知手段17,18とを備える。
(もっと読む)
走行制御装置
【課題】自車走行路の制限速度を的確に推定する。
【解決手段】フロントカメラ4およびリアカメラ5による撮像画像情報を画像処理し、走行車線の幅員、走行車線の左右の区画線の線種、左側の歩道と車道外側線部間(路肩)の幅員、中央帯の幅員などを検出する。これら情報とナビゲーション装置2からの道路種別情報とから自車走行路の“道路の区分”を予測し、この“道路の区分”に対して予め規定されている設計速度を推定する(ステップS1〜S5)。さらに、ナビゲーション装置2から道路勾配および道路曲線半径情報を獲得し、自車走行路の道路勾配および道路曲線半径に対して予め規定されている設計速度を推定する(ステップS6、S7)。そして、“道路の区分”および道路勾配、道路曲線半径に基づき推定した設計速度から自車走行路の設計速度を推定し、これを自車走行路の推定制限速度とする(ステップS8)。
(もっと読む)
走行支援装置
【課題】表示器の表示を自車両の前方又は側方の撮像画像からナビゲーション装置による案内画像に切替えるタイミングを、適切に設定することができる走行支援装置を提供する。
【解決手段】表示器7にナビゲーション装置6の案内画像が表示された状態で、車両1の走行速度が第1画像切替速度以下になったときに、表示器7に表示する画像を前記案内画像からカメラ2L,2Rにより撮像された前側方画像に切替え、その後、車両1の走行速度が第2画像切替速度以上になったときに、表示器7に表示する画像を前記前側方画像から前記案内画像に切替える表示制御部15と、第1画像切替速度を車両1の減速度が大きいほど高く設定すると共に、第2画像切替速度を第1画像切替速度よりも所定の速度幅分、高く設定する切替速度設定部14とを備える。
(もっと読む)
移動案内システム、移動案内装置、移動案内方法及びコンピュータプログラム
【課題】ユーザに案内分岐点を正確に特定させることを可能にした移動案内システム、移動案内装置、移動案内方法及びコンピュータプログラムを提供する。
【解決手段】手前分岐点に設置された退出側信号機に対する相対位置によって特定される案内開始地点と、その案内開始地点で開始する案内分岐点の案内フレーズをそれぞれ決定するとともに(S13)、停止線を認識対象とした高精度ロケーションシステムを用いて、最も新しく認識した停止線から車両の現在位置までの距離を算出し(S18)、算出した距離を用いて車両が案内開始地点を通過したか否か判定し(S19)、車両が案内開始地点を通過したと判定された時に、案内分岐点の案内を開始する(S20)ように構成する。
(もっと読む)
地図作成装置、方法及び車載用ナビゲーション装置
【課題】 走行により得られる位置情報に基づいて正確な地図情報を生成する。
【解決手段】 地図生成装置は、走行経路上のサンプリング点における位置情報を検出する位置検出部と、当該サンプリング点における曲率を算出する曲率算出部と、走行経路が、直線区間、円弧区間及びクロソイド曲線区間のいずれかで近似されるように、走行経路における曲率を補正する曲率補正部と、補正後の曲率に基づき走行経路に対応する道路上のノードの位置を示すノード情報を生成するノード情報生成部と、ノード情報を記憶する記憶部とを備える。曲率補正部は、走行経路における曲率変化量のピーク値Δχpeakを抽出するとともに、このピーク値をとる点を含む一定領域に対し、曲率変化量をΔχpeakとするクロソイド曲線区間として設定する。
(もっと読む)
61 - 80 / 2,058
[ Back to top ]