
Fターム[2F129GG17]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援機器 (2,561) | 撮像機器 (2,058)
Fターム[2F129GG17]に分類される特許
1,561 - 1,580 / 2,058
情報処理装置及び方法、情報処理プログラム、並びに記憶媒体
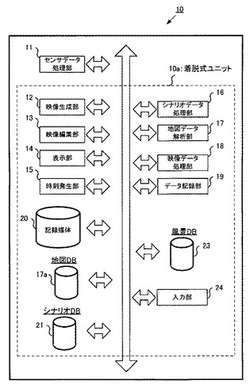
【課題】移動体の搭乗者が、走行の際に、リラックスして、移動体の走行を楽しむことを可能とする。
【解決手段】情報処理装置(10)は、移動体の走行位置及び走行状態に関する走行状態情報を算出する算出手段(11)と、走行状態情報に基づいて、走行位置の属性に関する地図属性情報を、地図データベースの解析により取得する取得手段(17)と、走行状態情報及び地図属性情報に基づいて、移動体内で再生する、映像情報、及び音楽情報のうち少なくとも一方であるコンテンツ情報のストーリーを示すストーリー情報を選択する選択手段(16)と、コンテンツ情報を生成する生成手段(12)と、コンテンツ情報を再生する再生手段(14)と、ストーリー情報に基づいて、(i)コンテンツ情報を生成するように、生成手段を制御し、(ii)生成されたコンテンツ情報を再生するように、再生手段を制御する制御手段(12、18等)と、を備える
(もっと読む)
ドライブプラン提示装置およびドライブプラン提示方法

【課題】
ドライバーに対する負担の少ないドライブプラン提示装置を提供する。
【解決手段】
ドライブプラン提示装置1は、目的地までに経由する経由地を提示する装置であって、目的地を決定する目的地決定部14と、目的地への目標到着時刻を決定する目標到着時刻決定部16と、現在位置を求めるGPS10と、現在時刻を求める現在位置取得部12と、現在位置および現在時刻に基づいて到着時刻に目的地に到着可能な経由地を求めるプラン生成部18と、プラン生成部18にて生成したプランに基づいて、目的地の途中までの経由地を表示するプラン表示部22とを備える。
(もっと読む)
走行軌跡推定装置
【課題】走行軌跡を高精度に推定することができる走行軌跡推定装置を提供することを課題とする。
【解決手段】車両の走行軌跡を推定する走行軌跡推定装置1であって、所定の検出条件のときに車両の位置を検出する位置検出手段2と、位置検出手段2で検出した位置の情報を記録する情報記録手段5と、情報記録手段5に記録されている車両の位置の情報を用いて、所定範囲内に存在する車両の位置を平均化して走行軌跡を推定する走行軌跡推定手段6とを備えることを特徴とする。
(もっと読む)
車輪速パルス補正装置
【課題】多大なインフラの構築を必要とせず、車速パルスの補正の機会が制限されることが少ない車輪速パルス補正装置の提供。
【解決手段】車輪速パルス補正装置10において、地物の位置情報を格納した地図データベース12と、走行経路上に存在する地物を画像認識する画像認識部20と、第1の地物Aが前記地物画像認識手段により画像認識されたときを起点して、第2の地物Bが前記地物画像認識手段により画像認識されるまでの車輪速センサの出力パルスをカウントする車速パルスカウント部24と、前記地物情報記憶手段に格納された第1の地物A及び第2の地物Bの地物情報に基づいて、第1の地物Aと第2の地物B間の距離Dを特定する相対距離算出部18と、前記2地物間パルスカウント手段によりカウントされたカウント値Cpと、前記2地物間距離特定手段により特定される2地物間距離Dとの関係に基づいて、前記演算式を補正することを特徴とする。
(もっと読む)
制御用情報記憶装置及びプログラム
【課題】車両制御を実行するタイミングの精度を向上させる。
【解決手段】ナビゲーション装置は、交差点から次の交差点までの区間の道路(交差点の退出路)で行われる車両制御に利用するための制御用情報をリンク単位で記憶する。具体的には、車両が交差点進入時に通過する一時停止線を制御終了点として検出し、車両が交差点退出時に通過する交差点を制御開始点として検出する。そして、車両の絶対位置に基づく走行軌跡を、制御開始点を始点としかつ制御終了点を終点として制御用情報として記憶し、制御用情報が既に記憶されている道路を走行する際に車両制御部へ出力する。これにより、車両制御部においては、実際の道路形状に基づく高精度な車両制御を実現することが可能となる。特に、車両が制御開始点や制御終了点を通過した通過タイミングを車両制御部へ出力することにより、車両制御のタイミングの精度を高めることができる。
(もっと読む)
車両用走行装置
【課題】車両の最適な走行経路を設定すること。
【解決手段】車両用走行装置10は、車両に搭載され、車両が進行する路面状態を検出する路面状態検出手段1、2と、目標とする目標位置までの走行経路を設定する経路設定手段3と、車両の特性を記憶する車両特性記憶手段4と、を備えている。経路設定手段3は、路面状態検出手段1、2により検出された路面状態と、車両特性記憶手段4により記憶された車両の特性と、に基づいて、走行経路S1、S2を設定する。
(もっと読む)
ナビゲーション装置およびその方法
【課題】車両の前方を撮像した実写画像に表示される非案内経路の道路に対応付けて、案内経路ではないことを示すオブジェクト(例えば、アイコンなど)を重畳表示することによって、実写画像に表示されている道路のうち、車両が進むべき道路を瞬時に把握することが可能なナビゲーション装置およびその方法を提供する。
【解決手段】車両の前方を撮像した実写画像を表示して経路案内を行うナビゲーション装置である。実写案内制御部10は、実写画像を用いて実写案内画像を生成する。アイコン表示道路選択部11は、車両が進むべき経路ではないことを示す非経路アイコンの表示対象となる道路を選択する。非経路アイコン重畳部12は、実写案内制御部10によって生成された実写案内画像に、アイコン表示道路選択部11によって選択された道路に対応付けた非経路アイコンを重畳する。
(もっと読む)
ナビゲーション装置、ナビゲーションプログラムおよびナビゲーション方法
【課題】複数の油種に対応した給油機の脇に停車する場合など、停車位置として複数の候補が存在する場合に、適切な位置に停車できないことがあった。
【解決手段】車両外の画像を取得し、前記画像に基づいて複数の停車位置の候補から停車位置を選択し、前記停車位置に配置すべき車両の部位を示す車両情報を取得し、前記車両の部位を前記選択した停車位置に合わせるための案内情報を出力する。
(もっと読む)
道路画像表示制御装置および道路画像表示制御プログラム
【課題】道路および前記道路上を移動する移動体を画像として表示させる装置において、従来とは異なる新規な方法で、表示される移動体を当該道路の現実の状況により即したものとする。
【解決手段】道路画像表示制御装置が、移動体の移動を抑制する信号機の作動内容の情報を取得し、さらに、当該画像内における当該移動体の移動を、取得した信号機の作動内容の情報に基づいて制御する。
(もっと読む)
運転支援システム
【課題】 駐車車両が存在している走行路に対して、自車が通行可能かどうかをドライバーが知ることのできる、利便性のよい運転支援システムを提供する。
【解決手段】 自動車1は、前方の駐車車両を検出し、その駐車車両の車両プロファイルを取得するとともに、その駐車車両の緯度・経度を計算し、これらをプローブデータとして運転支援サーバ6に送信する。運転支援サーバ6は、プローブデータを蓄積し、これを用いて駐車車両を考慮した通行可能エリアを算出し、その通行可能エリアの情報を自動車1に送信する。自動車は、運転支援サーバ6から送信された通行可能エリアの情報に基づいて案内走行ルートを更新する。
(もっと読む)
ドライブ記録装置およびドライブ記録方法
【課題】事故発生時のドライブ情報とそれ以外のドライブ情報とを容易に識別することができるドライブ記録装置及びドライブ記録方法を提供する。
【解決手段】車両に搭載されている加速度センサから加速度を取得する加速度取得手段と、前記車両の周辺状況を含むドライブ情報を取得するドライブ情報取得手段と、閾値以上の加速度が取得されると、前記ドライブ情報及び前記車両の走行履歴の少なくともいずれか一方に基づいて、前記加速度が事故発生に起因するか否かを判定する判定手段と、事故発生に起因すると判定された前記加速度に対応する前記ドライブ情報を記録媒体に記録する記録手段と、を備えるドライブ記録装置。
(もっと読む)
道路形状取得装置
【課題】高精度な道路形状を低コストに取得できる道路形状取得装置を提供すること。
【解決手段】道路を構成するリンクに基づき生成したリンク平面をグリッドに分割して、所定以上の白線存在確率P(m)のグリッドから道路形状を取得する道路形状取得装置10であって、道路のリンク情報を記憶した地図データ記憶手段17と、車両の位置を検出する位置検出手段11,12、13と、道路の白線を検出する白線検出手段14,15と、検出された白線に対応するグリッドから所定範囲のグリッドの白線存在確率、及び、予め定めた更新用白線存在確率P(Z|m)をベイズの更新式に適用して白線存在確率を更新する白線存在確率設定手段16と、を有することを特徴とする。
(もっと読む)
合流支援装置
【課題】合流結果の状況を高い精度で予測して的確な情報を自車両の運転者に提示し、合流の際の運転者による運転操作を適切に支援することができるようにする。
【解決手段】コントローラ1が、自車両の合流挙動特性を学習し、その学習値に基づいて自車両運転者が直ちに運転行動を実行した場合の結果状況を予測して、その危険度を算出する。そして、情報提示装置9が、コントローラ1により算出された合流結果の危険度を表す情報を自車両運転者に提示する。
(もっと読む)
経路探索装置および移動端末装置
【課題】GPSを利用することなく効果的な経路ナビゲーションを実現すること。
【解決手段】サーバ装置30の記憶部34が、ある分岐点から所定の方向に進行した場合に通過する分岐点に係る情報を分岐点データ34aとして記憶し、経路探索部35eが、移動端末装置10が道路に設置された案内標識を撮影することにより得られた分岐点に係る情報を移動端末装置10から取得し、記憶部34に記憶された情報と移動端末装置10から取得した情報とに基づいて目的地までの経路を探索する。
(もっと読む)
位置データ取得装置
【課題】取得した現在地の位置データを的確に補正する。
【解決手段】ユーザ携帯電話2のシャッタボタン6を操作すると、制御部3は、撮影を行うとともに、GPS算出部8にプログラム起動信号を出力し、GPS算出部8は、ユーザ位置データを算出する。そして、制御部3は、アンテナ7を介して、ユーザ携帯電話2の外部に向けて位置データ取得指令信号を発信する。現在地の位置データを取得する機能を有する第1,第2周辺携帯電話11,12は、位置データ取得指令信号を受信すると、得した第1,第2周辺位置データを第1,第2取得データ信号に変換して外部に向けて発信する。アンテナ7で第1,第2取得データ信号を受信すると、制御部3は、第1,第2周辺位置データとユーザ位置データとの平均値を算出し、算出した平均位置データを撮影した画像データに記憶した後、画像データをメモリ9に記憶する。
(もっと読む)
緊急通報装置および緊急通報システムならびに緊急車両案内システム
【課題】緊急事態に対処する際の所要時間を短縮することができる「緊急通報装置および緊急通報システムならびに緊急車両案内システム」を提供すること。
【解決手段】自車両に緊急事態が発生したことを緊急通報先に通報して緊急車両の出動を要請する緊急事態発生通報手段7と、緊急通報先に、自車位置情報を送信する自車位置情報送信手段7と、緊急通報先に、自車位置情報以外の自車両の取得情報における緊急事態に対処する際の所要時間を短縮するために利用可能な情報である利用可能情報を送信する利用可能情報送信手段7とを備えたこと。
(もっと読む)
合流支援装置及び合流支援方法
【課題】自車両が合流を開始してから終了するまでの間における自車両と周囲車両との位置関係を自車両の運転者に直感的に把握させ、最適な運転操作を正しく選択できるようにする。
【解決手段】コントローラ1の経路予測演算部14が、自車両把握部11、周囲車両把握部12、道路状況把握部13からの情報をもとに、所定経過時間内における自車両及び周囲車両の予測経路を算出する。そして、表示画像生成部15が、経路予測演算部14からの情報をもとに、所定時間間隔ごとの自車両及び周囲車両の予測到達位置をそれぞれ算出し、同時刻での自車両及び周囲車両の予測到達位置を関連付けて表した表示画像を生成して、表示装置9に表示させる。
(もっと読む)
車両速度制御システム
【課題】途中で曲率が変化するカーブにおいても、適切に車両の速度を制御する。
【解決手段】曲率が変化するカーブをナビゲーション装置2により自車両の進行方向に検出し、制御点設定部10によりそのカーブ上に複数の制御点を設定する。こうして設定された制御点ごとに、曲率算出部11により曲率値を求めると共に、自車両の目標横加速度を目標横加速度設定部12により設定する。この曲率値と目標横加速度に基づいて、当該カーブを走行する際の自車両の目標速度を目標速度算出部13により算出し、算出された目標速度に基づいて、車両制御部16により自車両の速度を制御する。
(もっと読む)
車両用周辺情報提示装置及び車両用周辺情報提示方法
【課題】表示装置に表示された映像のどの領域が目視できない領域であるのかを運転者が瞬時に確認可能にする。
【解決手段】周辺有効視野範囲設定部6が、車両1周辺に対する運転者Mの有効視野範囲を周辺有効視野範囲として設定し、画質変換部8が、周辺画像撮像部3により撮像された映像領域のうち、周辺有効視野範囲に対応する映像領域の画質を他の映像領域の画質に対して変化させる。これにより、運転者の周辺有効視野範囲に対応する映像領域と運転者が目視できない領域に対応する映像領域とでは画質が異なるようになるので、運転者は画質の違いから表示部5に表示された映像のどの領域が目視できない領域であるのかを瞬時に確認することができる。
(もっと読む)
車両用運転補助装置
【課題】注意地点における安全確認等の手順を運転者に案内することができる車両用運転補助装置の提供を目的とする。
【解決手段】本発明による車両用運転補助装置100は、車両走行時における注意地点を検出する注意地点検出部114と、車両における運転者により目視可能な位置に配置され、車両の外部環境を映し出す複数のミラー190,192と、注意地点検出部114により注意地点が検出された場合に、該注意地点において目視すべきミラー190,192の順序を、運転者に対して案内する目視案内処理部113とを備えることを特徴とする。
(もっと読む)
1,561 - 1,580 / 2,058
[ Back to top ]