
Fターム[2F129GG17]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援機器 (2,561) | 撮像機器 (2,058)
Fターム[2F129GG17]に分類される特許
1,841 - 1,860 / 2,058
車載用電子システム
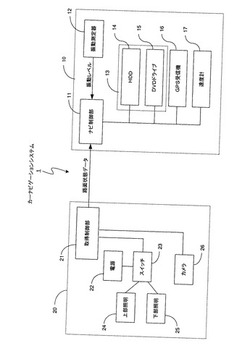
【課題】振動や衝撃が発生する場所が地図情報として記憶装置に記憶されていない場合に、その場所を車両が通過しても、備えられた記憶装置が故障しない車載用電子システムを提供する。
【解決手段】上部照明24及び下部照明25を順次点灯させ、上部照明24及び下部照明25の点灯に同期させてカメラ26で画像を取得する。そして、取得制御部21では、取得した画像から地面データにない進路面の凹凸を判定するとともに、その凹凸の大きさを算出する。さらに、ナビ制御部11では、取得制御部21で算出した凹凸の大きさから振動レベルを算出することにより、振動レベルの値を推定する。そして、ナビ制御部11は、推定した振動レベルが所定以上のときにはHDD14及びDVDドライブ15を保護モードにするので故障しないナビゲーションシステムとなる。
(もっと読む)
車両用運転支援装置

【課題】 不必要な運転支援制御を適切に防止すること。
【解決手段】 本発明による車両用運転支援装置は、自車位置検出手段と、進行方向前方の一時停止地点を検出する一時停止地点検出手段と、車両の走行状態を検出する走行状態検出手段と、前記検出された自車位置と一時停止地点の位置との距離を演算する距離演算手段と、少なくとも前記検出された走行状態及び前記演算された距離に基づいて、運転者に対して該一時停止地点での一時停止を促す注意喚起出力手段と、前記検出された走行状態及び前記演算された距離に基づいて、該一時停止地点の手前所定距離内で所定の一時停止状態が少なくとも1回形成されたか否かを判定する一時停止実績判定手段と、前記一時停止実績判定手段により一時停止状態が少なくとも1回形成されたと判定された場合に、該一時停止地点における前記注意喚起出力手段による注意喚起を禁止する。
(もっと読む)
車載通信装置及び車両間通信システム
【課題】各車両が自車の情報を周辺車両に同報することができる車載通信装置及び車両間通信システムを提供すること。
【解決手段】車載通信装置10は、車両が交差点エリア及び道路エリアのいずれにあるかを判定するエリア判定手段11と、車両の進行方向及び車両が存在するエリアに応じて無線信号の周波数チャネルを設定する周波数チャネル設定部12と、無線信号によって車両間の無線通信を行う無線通信部13とを備え、エリア判定手段11は、地図データを記憶する地図データ記憶部11aと、車両の現在位置を検出する現在位置検出部11bと、交差点エリアへの車両の流入出を判定する交差点エリア流入出判定部11cとを備える。
(もっと読む)
ナビゲーション装置
【目的】ドライバが必要とする地点のリアルタイム画像を自動的に取得して表示する「ナビゲーション装置」を提供することである。
【構成】所定の地点の風景を撮影するカメラC1,C2を特定するカメラ特定データと該カメラが撮影した映像を提供する映像提供元の電話番号を記憶し、いずれかのカメラが撮影した映像を表示する情況になったとき、該カメラを特定し、該特定されたカメラが撮影した映像の提供元電話番号を取得し、該映像提供元に発呼してカメラで撮影したライブ映像を取得して地図と共に表示する。たとえば、外部より提供される道路交通情報が特定する混雑道路であって目的地への誘導経路GR上の道路に設置されたカメラC1が撮影したライブ画像および混雑道路を迂回する迂回道路RDP上に設置されたカメラC2が撮影したライブ画像を表示して、ドライバの道路選択の参考にさせる。
(もっと読む)
位置評定装置、位置評定方法および位置評定プログラム
【課題】 都市部などGPSの衛星補足数が十分確保できない条件下でも測位精度の劣化を防ぐことを目的とする。
【解決手段】 天空画像カメラ部110が撮影して撮像データを生成し、天空画像変換部120が撮像データを仰角・方位角面に投影する。また、DSM取得部140が各地点において天空画像カメラ部110が撮影するであろう範囲の地理データをDSMデータベース190から取得し、DSM変換部150が地理データを仰角・方位角面に投影する。そして、位置・姿勢推定部160が仰角・方位角面に投影した撮像データと各地点における地理データとを比較し、地理データが撮像データと一致する地点を天空画像カメラ部110の撮影時の位置評定装置100の位置とする。
(もっと読む)
運転支援システム
【課題】車両がカーブを安全な速度で通過できるように支援する運転支援システムを提供する。
【解決手段】カーナビゲーション装置により自動車の現在の位置座標と進行方向が検出される。ナビゲーション制御部は、自動車の進行経路に存在するカーブを検出し、カーブ情報をシステムコントローラに入力する。速度算出部はカーブ情報に基づいて目標速度を算出する。自動車の速度が目標速度より大きい場合は、スロット機構部及び自動変速機を制御して自動車を目標速度以下まで減速させる。車載カメラで前方のカーブが撮像されると、画像データから障害物の検出が行われる。障害物が検出されると速度算出部は、障害物情報とカーブ情報に基づいて最適速度を算出し、自動車の速度が最適速度より大きい場合にはスロット機構部及び自動変速機を制御し、自動車を最適速度以下まで減速させる。よって、障害物の存在するカーブでも安全に通過できる。
(もっと読む)
表示装置およびナビゲーション装置
【課題】見る方向によって表示される画像を変えることができるディスプレイにおいて、助手席の乗員が映画を視聴中に、運転者がナビゲーションの画面を操作すると、運転者のタッチパネルを操作する手が画面を隠すため、運転者が操作中の映画の内容が鑑賞できない。
【解決手段】互いに異なる画像を同時に表示する表示手段と、操作者の表示手段の前面への接触位置の座標値を検出する接触位置検出手段と、接触位置検出手段への操作者の操作開始を検出する操作開始検出手段と、接触位置検出手段で検出された座標値に基づいて表示手段に表示される画像を制御する映像制御手段とを備え、映像制御手段は、操作開始検出手段が一方の画像に対する操作者の操作開始を検出すると、再生している他方の画像を一時停止する。
【選択図】図2
 (もっと読む)
(もっと読む)
ナビゲーション装置及びナビゲーション方法
【課題】特定地点の通過に応じて適切な支援情報がユーザに提供開始されるナビゲーション装置及びナビゲーション方法を提供する。
【解決手段】自車の特定地点の通過を検出する検出手段と、前記自車に搭載されているセンサから出力されるセンシング情報を入力する入力手段と、前記センシング情報の有効性を判定する判定手段と、前記自車の前記特定地点の通過が検出され、前記判定手段により前記センシング情報が有効であると判定された場合、前記センシング情報に基づいて運転支援情報を出力するセンシングモードに遷移する運転支援手段と、を備えるナビゲーション装置。
(もっと読む)
自車位置表示装置及びその方法並びにプログラム
【課題】自車位置を正確に把握し、走行中の走行領域上に位置するように自車位置を補正した上で、走行状況に即した自車位置を的確に示すことにより、ナビゲーションの品質向上に寄与することが可能な自車位置表示装置及び方法並びにプログラムを提供する。
【解決手段】自車位置補正部46は走行領域判断部45の判断結果に基づいて自車位置特定部40にて特定された自車位置を補正する。自車位置表示部51は、地図データ表示部50にて表示された地図上に、自車位置補正部46で補正された自車位置を表示すると共に、自車位置補正部46で補正された自車位置が地図上の道路から逸脱する可能性がある場合には自車位置特定部40で特定された自車位置を地図上に表示する。
(もっと読む)
通信端末、データ送信方法、データ受信方法、データ送信プログラム、データ受信プログラムおよび記録媒体
【課題】それぞれの端末において取得可能な映像データを有効に活用すること。
【解決手段】第1の通信端末110および第2の通信端末120は、相互に通信可能な複数の通信端末からなる通信ネットワーク内の通信端末である。第1の通信端末110は、入力部111、取得部112、配信部113、受信部114、送信部115によって構成される。入力部111は、映像データの撮像入力を受け付ける。取得部112は、入力部111によって撮像入力された場合、映像データを、その撮像中における第1の通信端末110の地点情報とともに取得する。配信部113は、取得部112によって取得された地点情報を、第2の通信端末120を含む他の通信端末に配信する。受信部114は、地点情報が配信された結果、映像データの送信要求信号を他の通信端末から受信する。送信部115は、送信要求信号を送信した通信端末に映像データを送信する。
(もっと読む)
地図更新装置
【課題】自車両周辺の立体物等の目印を用いて自車両位置を高精度に推定した結果から道路形状等の地図情報を更新する。
【解決手段】自車両の位置を検出する自車位置センサ10、自車両周辺の目印をランドマークとして検出するランドマークセンサ12と、道路形状及び複数のランドマークの位置を含む地図情報を記憶する記憶装置16と、複数のランドマークの位置情報と記憶装置に記憶された複数のランドマークの位置情報とがマッチングしているか否かを判断し、マッチングしていると判断された複数の目印の位置情報及び自車両の位置情報に基づいて、道路形状を演算し、演算された道路形状に基づいて、地図情報を更新する制御装置14とから構成されている
(もっと読む)
車両用表示装置
【課題】ディスプレイに周囲映像を表示する地図上のモニタ領域を可変にして,制御装置のメモリ容量の減少を可能にし,またディスプレイの使い勝手の向上を図る。
【解決手段】車両Vに取り付けられて周囲映像を撮像するカメラ1と,車両Vの現在位置を検出する車両位置検出手段3と,地図データを表示するナビゲーション装置4と,車両Vの運転席近傍に配置されてカメラ1で撮像された周囲映像と他の映像を切換表示するディスプレイ5と,地図データ上にモニタ点P1…を設定するモニタ点設定手段6と,地図データ上に設定されたモニタ点P1…を登録し,このモニタ点P1…を中心とする所定半径Rのモニタ領域A1…内に車両Vが進入したことを判定したとき,ディスプレイ5に周囲映像を表示させる制御装置7とを備える車両用表示装置において,制御装置7が決定するモニタ領域の広さを変更し得るモニタ領域可変手段9を制御装置7に接続した。
(もっと読む)
車載用表示装置、その制御方法及び制御プログラム
【課題】車両の進行方向前方の撮影画像を、車両の走行状況に応じて経路案内の表示された表示装置に表示させることにより、ユーザの操作なしで所望のタイミング又は場面に前方の画像を表示させる。
【解決手段】走行状況検出部52は、車両の速度、車両が走行中の道路種別、車両が走行中の道路の交通情報を検出する。走行状況判定部53は、上記各走行状況と、設定状況制御部54によって記憶装置9から読み出される予め設定された所定の状況とが一致するか否かを判定する。画像表示部55は、走行状況判定部53が走行状況と所定の状況とが「一致する」と判断した場合に、撮影部12から得られる車両進行方向前方のリアルタイム画像を表示部10に表示する。
(もっと読む)
ナビゲーション装置
【課題】 使用者にとってできるだけ使いやすいナビゲーション装置を提供する。
【解決手段】 制御手段29において、マイクロフォン28を介して入力される場所に関するキーワードの内容と合致するものを地図データベース25を検索して50音順に並べ、その50音順にならべたものを、設定履歴記憶部30に記憶されている目的地或いは到達場所として設定された設定履歴頻度の順に表示部26に提示させる。そして、表示部26に提示させた検索結果のうち、操作スイッチ群22を介して入力された選択入力により選択された場所を、目的地設定履歴情報として設定履歴記憶部30に記憶させる。これにより、使用者が入力したキーワードに対する場所が過去に設定された頻度順に直接表示されるので、所望する場所を地域や施設名称を階層的の選択するための操作をする必要がなくなり使いやすいナビゲーション装置となる。
(もっと読む)
ナビゲーション装置
【課題】運転者の情報に基づいて調整した探索コストを用いて経路の探索を行うことによって、運転者に合わせた適切な経路を設定することが可能となり、利用者の利便性を向上させたナビゲーション装置を提供する。
【解決手段】運転者の運転技量を質問する運転技量質問画面51を表示する(S1)とともに、利用者の応答に基づいて運転者の運転技量を特定し(S2)、その後に目的地が設定された際に特定された運転者の運転技量が低いと判定された場合(S6:YES)には、特に交差点の右折におけるノードコストを通常より高くして(S7)経路の探索処理を行う(S8)ように構成する。
(もっと読む)
ナビゲーション装置、方法及びプログラム
【課題】交差点や分岐点あるいは高速道路の入口等、ユーザに対して画像を用いての誘導案内が必要である地点において、常に一定期間内に撮影された画像を表示することにより、ユーザに的確な誘導案内を行うことのできるナビゲーション装置、方法およびプログラムを提供する。
【解決手段】距離計測部46は、現在位置計算部41によって検出される現在位置と、予め設定された所定地点のノードとの距離が所定距離以内になったか否かを測定し検出する手段である。画像有無判定部47は、ディスク制御部13を介して、所定地点のノードの属性データに画像データが含まれるか否かを判定する手段である。画像撮影制御部48は、外部の画像撮影部12に当該所定地点の画像を撮影させ、撮影した画像データを道路地図データベースに保存する手段である。画像表示部49は、所定地点の画像データを表示部10に表示する手段である。
(もっと読む)
ナビゲーション装置、ナビゲート方法および車両
【課題】交差点等の分岐地点において、進路変更等に必要となる当該分岐地点付近についての適切な画像をドライバに提供するナビゲーション装置を提供すること。
【解決手段】経路探索部102は、設定された目的地にいたる経路を探索する。撮像規則設定部107は、探索された経路に存在する分岐地点における撮像部109の撮像規則を決定する。距離算出部104は、自車位置と分岐地点までの距離を算出する。制御部108は、決定された撮像規則に基づき、算出された距離に応じて出力装置に提示する画像を変化させる。
(もっと読む)
ランドマーク強化型道案内
位置に基づいたサービスを提供するためのシステム及び技術。一般的に、1つの実現例においては、本技術は初期位置から最終位置への道案内に対する要求を受取り、初期位置から最終位置への経路を決定し、その経路に基づいて1つ又はそれ以上のランドマークを決定し、且つ初期位置から最終位置への経路を通行するための道案内であって該1つ又はそれ以上のランドマークへの参照を包含する道案内を供給することを包含している。 (もっと読む)
ナビゲーション装置及び車両位置推定方法
【目的】 カーブ走行時に直線走行時と異なる方法で車両位置推定を行なう「ナビゲーション装置及び車両位置推定方法」を提供することである。
【構成】 車両回転方向計算部は車両方位の変化から車両回転方向を判別し、角速度計算部は車両の角速度を求め、回転半径計算部は該角速度と所定時間毎の移動距離とから車両の回転半径Rを求め、回転半径補正部は左回転であれば道路上の走行位置に応じた補正値WLだけ大きくなるように回転半径Rを補正し、右回転のであれば道路上の走行位置に応じた補正値WRだけ小さくなるように回転半径Rを補正し、車両位置推定部は該補正した回転半径を用いて道路中心線上に車両位置を推定する。
(もっと読む)
ナビゲーション装置、その方法、そのプログラム及びその記録媒体
【課題】
正確なルート案内に要求される道路種別の判定を簡易な構成で行う。
【解決手段】
道路種別判定部210が、地図データ保持領域121内の地図データを参照することにより、走行中の車両が高速道路と一般道路との並行隣接区間に到達したか否かを判定する。この判定結果が肯定的であった場合に、走行時間計測部220が、並行隣接区間内に車両の走行時間を計測するための測定区間を設定して、車両が測定区間を走行するのに実際に要した時間を計測する。そして、道路種別判定部240が、その計測された走行時間と、測定区間における交通状況を考慮して設定された高速道路用設定値及び一般道路設定値とを利用して、車両が走行している道路種別が高速道路又は一般道路のいずれであるかを判定する。
(もっと読む)
1,841 - 1,860 / 2,058
[ Back to top ]