
Fターム[2F129GG17]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援機器 (2,561) | 撮像機器 (2,058)
Fターム[2F129GG17]に分類される特許
1,921 - 1,940 / 2,058
ナビゲーション装置
【課題】 現在位置そのものに限らず、ユーザの視野にある物体の位置を、地点登録の対象とする。
【解決手段】 ナビゲーション装置は、地図データを記憶する記憶手段と、撮影装置と、撮影して得た映像を表示する手段と、表示された映像内の点の指定をタッチパネルにより受け付ける手段と、指定された位置に対応する地図上の座標位置を求める登録地点算出手段と、求めた地図上の位置を登録する手段とを備えている。登録地点算出手段は、指定された点の映像内の位置と、撮影装置の地図上の位置と、撮影方位とを用いて、指定された点の地図上の座標位置を求める。
(もっと読む)
ナビゲーション装置およびナビゲーション方法

【課題】 候補道路の信号機情報および自車の走行状態を元に、自車の走行道路を特定するナビゲーション装置およびナビゲーション方法を提供する。
【解決手段】 自車の位置を検出する位置検出手段と、前記位置検出手段で検出された前記自車の検出位置と地図情報とをマッチングさせて前記自車の走行道路を特定するマッチング手段と、前記自車の走行状態を検出する走行状態検出手段と、前記自車の周辺に設置されている信号機の設置位置および信号色を取得する信号機情報取得手段とを備え、前記マッチング手段は、前記走行道路を特定するときに複数の候補道路がある場合、前記設置位置における前記自車の走行状態と前記設置位置の前記信号機の信号色とに基づいて前記走行道路を特定する。
(もっと読む)
情報出力装置
【課題】 本発明は、ユーザの好みに合うように情報の出力様式を変更することができる情報出力装置の提供を目的とする。
【解決手段】 ユーザに対する情報の出力装置70を複数有する情報出力装置において、ユーザからの変更指示入力に従って情報毎に出力装置の変更が可能であって、前記変更指示入力の変更履歴を記憶する記憶装置80と、記憶装置80に記憶された変更履歴に基づいて、前記変更指示入力によって変更対象となった情報の変更前の出力装置と同一又は類似の他の情報の出力装置を、前記変更指示入力によって変更対象となった情報の変更後の出力装置と同一又は類似の出力装置に変更する制御装置50とを備えることを特徴とする情報出力装置。
(もっと読む)
ナビゲーション装置及びナビゲーション方法
【課題】 前方交差点での正確な右左折困難度に応じた適切な走行経路を案内できるナビゲーション装置及びナビゲーション方法を提供する。
【解決手段】 自車の進行方向に通行可能なレーン数と前記自車が位置するレーンとを検出するレーン検出手段と、前記自車の進行方向に通行可能なレーンの渋滞度を検出する渋滞度検出手段と、検出された前記レーン数、前記レーン及び前記渋滞度に基づいて前方交差点での右左折困難度を判定する判定手段と、判定された前記右左折困難度に応じた走行経路を案内する案内手段と、を備えるナビゲーション装置。
(もっと読む)
ナビゲーション装置及びナビゲーション方法
【課題】 運転技能に応じた適切な操作案内をドライバに提供できるナビゲーション装置及びナビゲーション方法を提供する。
【解決手段】 車両が予め決められた特定状況にあると判定する状況判定手段と、前記特定状況における現実の車両制御状態を検出する現実状態検出手段と、前記特定状況に応じた適正な車両制御状態を特定する適正状態特定手段と、前記現実の車両制御状態と前記適正な車両制御状態とに基づいて前記特定状況におけるドライバの運転技能を学習する学習手段と、学習された前記運転技能に応じた操作案内を前記特定状況で出力する案内手段と、を備えるナビゲーション装置。
(もっと読む)
視覚情報呈示装置及び視覚情報呈示方法
【課題】小型、且つ、安価な構成で、両眼視差により視覚情報が二重に見えることを防止する。
【解決手段】視覚情報表示制御手段2が、周期xで長さLが条件式2L≧xを満たす視覚情報12が水平方向に繰り返し表示される表示パターンを生成し、生成した表示パターンを視覚情報として運転者の前方視界11内に表示する。これにより、小型、且つ、安価な構成で、両眼視差により視覚情報12が二重に見えることを防止できる。
(もっと読む)
車載通信装置および車載通信装置用プログラム
【課題】ハンズフリー機能を有する車両用ナビゲーション装置1が、近隣の適当な場所で電話に応対しようという意志に沿った作動を行うようにする。
【解決手段】車両用ナビゲーション装置1は、電話着信があったときに、立ち寄り地即通知モードにおいて、ドライバーによる電話応対用の立ち寄り地の指定を受け付け(ステップ510参照)、その指定立ち寄り地までの経路を算出し(ステップ520参照)、着信に係る電話回線を一時的に開いて当該指定立ち寄り地までの予想到着時刻等の情報をその回線を介して発信元に送信し(ステップ530、540、550参照)、その後指定立ち寄り地に到着すると(ステップ570参照)、当該発信元の携帯電話とのハンズフリー通話を自動的に開始する(ステップ580、590参照)。
(もっと読む)
車両制御補助装置及び車両制御補助方法
【課題】 運転者が理想のブレーキ操作量に対する現在のブレーキ操作量の過不足を適切に判断することができ、それによって容易に適切なブレーキ操作を行えるようにする。
【解決手段】 自車両の現在車速を検出する車速検出手段18と、自車両のブレーキ操作量を検出するブレーキ操作量検出手段21と、自車両の減速制御の目標点である減速目標点を決定する減速目標点決定手段24と、減速目標点における目標車速を決定する目標車速決定手段25と、現在車速、減速目標点及び目標車速に基づいて、減速目標点において目標車速となるための目標減速点までの間の理想ブレーキ操作量を決定する理想ブレーキ操作量決定手段47と、理想ブレーキ操作量と現在のブレーキ操作量との関係を示す報知情報を生成する報知情報生成手段28と、生成された報知情報を報知する報知手段48と、を備える。
(もっと読む)
地図情報更新方法及びナビゲーション装置
【目的】 道路標識を用いて実際の道路走行規制を認識し、実際の規制と地図情報の規制との相違を検出して地図を更新する「地図情報更新方法及びナビゲーション装置」を提供することである。
【構成】 自車通過中道路の実際の規制と地図情報による規制とを比較し、異なれば実際の規制に基づいて地図情報の規制データを更新する。すなわち、車両前方の規制標識を識別し、該規制標識による規制と地図情報による規制とを比較し、規制標識による規制と地図情報による規制が異なれば、規制終了標識が存在するリンクを求め、規制標識が存在するリンクから規制終了標識が存在するリンクまでの、地図情報の規制データを規制標識による規制に基づいて更新する。
(もっと読む)
ナビゲーション装置
【課題】 地図データには含まれていない車両などの物体を含めて自車位置周辺の平面図を表示する。
【課題手段】 車載用ナビゲーション装置の記憶装置には、地図データと、物体(例えば、車両、バイク、人、建物)の画像データ(例えば、3Dポリゴンデータ)とが記憶されている。そして、カメラにより取得した映像を用いて、車両の周辺に存在する物体に対応する画像データを選択し、選択した画像データから生成される物体の画像(ポリゴン)を、車両周辺の地図上に配置した後、天頂方向からの平面図に変換し表示する。
(もっと読む)
車両位置検出装置及びシステム
【課題】敷設コストを抑え、精度の高い位置検出を可能とする車両位置検出装置を提供する。
【解決手段】車両位置検出装置において、車両周辺の映像を撮影する撮像部と、撮影された映像を画像データとして取り込む入力部と、取り込まれた画像データの中から所定の形状を持つ指標を認識し、認識された指標の種類を特定する認識部と、特定された指標の種類とその指標の種類に対応する位置情報とを記憶する記憶部と、特定された指標の種類に基づき、上記記憶部から位置情報を取得する取得部と、取得された位置情報により車両の位置を決定する決定部とを備える。
(もっと読む)
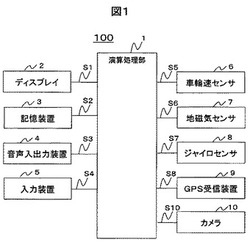
車載表示装置
【課題】車両乗員に対する表示出力の情報量を向上すること。
【解決手段】表示処理部31内部の指向性制御部31aは、ディスプレイ33に設けた液晶シャターの動作を制御し、ディスプレイ33の表示出力に指向性を持たせて複数の指向性表示出力を重ねる。表示設定変更部11aは、ディスプレイ33による指向性表示出力の数と方向についての設定を変更し、表示内容選択部11bは、複数のカメラによる撮影や撮影結果である映像の分割などによって得られた複数の映像を、その位置関係に基づいて複数の指向性表示出力に割り振る。
(もっと読む)
主観的地図作成システム
【課題】ユーザ一人一人の視点に立ち、ユーザにとって利用価値の極めて高い主観的な地図を容易に作成することのできる、主観的地図作成システムを提供する。
【解決手段】情報収集手段(21)が、位置情報および時刻情報とを関連付けて収集し、情報記憶手段(22)が、収集された行動情報、位置情報および時刻情報とを関連付けて記憶し、既存地図記憶手段(23)が、既存の地図データを記憶し、領域分割手段(24)が、既存の地図データを複数の領域に分割し、移動回数カウント手段(25)が、最も古い時刻を示している時刻情報と対をなす位置情報が該当する領域をスタート領域とし、以後移動した周りの領域に対する移動回数を数え上げ、移動ネットワーク作成手段(26)が、移動した全ての領域の間を移動時刻順に結ぶネットワークを作成し、各領域間に対して決定した重み付け値で移動ネットワークを重み付けし、抽出した主観的情報を既存の客観的地図データへ埋め込むことにより、主観的地図作成を行う。
(もっと読む)
ナビゲーション装置
【課題】 立体交差化された道路を検出する際の処理負担の軽減および検出精度の向上が可能な「ナビゲーション装置」を提供すること。
【解決手段】 信号機の設置位置と道路形状を含む地図データを格納する地図DB10等と、車両走行中に車両前方に存在する信号機を検出する信号機検出部30と、地図DB10等に格納された地図データに含まれる信号機の設置位置と、信号機検出部30による信号機の検出結果とに基づいて、道路が立体交差化されたか否かを判定する信号機比較部32、立体交差判定部34と、立体交差判定手段によって立体交差化されたと判定された道路に対応する地図データの更新を行う地図データ更新部36とが備わっている。
(もっと読む)
車両停止検出装置、カーナビゲーション装置
【課題】 車両停止検出装置において、従来よりも高精度に車両の停止を検出する。
【解決手段】 領域抽出部2が、バックカメラ20で撮像された時系列の複数の画像S0のうち、所定の近傍画像Sをそれぞれ抽出し、特徴量算出部3が、この時系列の複数のうち最新の近傍画像Sについてコントラストを表す特徴量J1を算出し、また、複数の近傍画像S間での差異を示す特徴量J2を算出し、判定部4が、両特徴量J1,J2に基づいて、車両200の停止を判定することにより、車両の停止を精度よく検出する。
(もっと読む)
ナビゲーション装置
【課題】 ユーザが、誘導経路上の広範囲にわたる複数の地点の交通情報を一度に把握することができ、かつ、これらの広範囲にわたる複数の地点の交通情報に基づいて、ユーザの意思を反映させた経路探索を実現することができる「ナビゲーション装置」を提供すること。
【解決手段】 経路探索手段16によって探索された誘導経路上に存在する交通情報を有する複数の地点の画像25を、表示部11に分割して表示するための制御を行う表示制御手段16を備え、前記経路探索手段16が、前記誘導経路上に存在する交通情報を有する複数の地点のうち、ユーザが選択した地点を迂回する迂回誘導経路を探索可能とされていること。
(もっと読む)
カーナビゲーション装置
【課題】 動作が停止された後に移動されても起動時に正常なナビゲーションを開始できるカーナビゲーション装置を提供する。
【解決手段】 現在の位置を検出する位置検出手段1と、現在向いている方向を検出する方向検出手段2と、位置および方向の少なくとも1つを変更する地点を、変更地点として登録する変更地点登録手段3と、起動時に位置検出手段で検出された位置が変更地点登録手段によって登録された変更地点から所定範囲内にあるかどうかを判断する変更地点判断手段4と、変更地点判断手段によって所定範囲内にあると判断された場合に、位置検出手段で検出された位置を示す値および方向検出手段で検出された方向を示す値の少なくとも1つを、位置および方向の各々に対してあらかじめ定められた変更値に変更する位置・方向変更手段6とを備えている。
(もっと読む)
自車位置検出装置、ナビゲーション装置、減速制御装置及び自車位置検出方法
【課題】 分岐地点で自車両が分岐路に進んだかどうかの判断を的確に行い、ナビゲーション装置で認識している自車両の現在位置を的確に補正する。
【解決手段】 単眼カメラ4の撮像情報に基づいて左右の道路白線の線種を判断し、ナビゲーション装置2からの自車両前方の道路地図情報に基づいて自車両前方にインターチェンジ出口への分岐地点を検出したとき、左右の道路白線の何れか一方が分岐地点の境界線の特徴である太破線であることが検出され(ステップS21、S25)、その後、他方の道路白線が太破線であることが検出されたとき(ステップS22、S26)、自車両は境界線を跨いで走行し、すなわち、本線から分岐路に進んだと判断する(ステップS23、S27)。この境界線を跨いだことを検出したとき、ナビゲーション装置2に対して位置補正要求を行い、ナビゲーション装置2では自車両の現在位置を、分岐地点の境界線近傍の位置に補正する。
(もっと読む)
地図情報更新方法及びナビゲーション装置
【目的】 道路幅を正しく測定して地図情報の変更処理を行えるようにする「地図情報更新方法及びナビゲーション装置」を提供することである。
【構成】 ナビゲーション装置において、通過中道路の道路幅を測定して地図情報の道路幅と比較し、異なれば測定した道路幅で地図情報の道路幅を更新する。すなわち、カメラで前方を走行中の車両を含む前方風景を撮影し、車幅検出部は前方車両の車幅Lcを求め、道路幅計算部は撮影画像における車幅と道路幅との比率(例えば、車幅のピクセル数及び道路幅のピクセル数の比)並びに車幅Lcを用いて道路幅LRを算出し、道路幅変更更新処理部は、該道路幅と地図情報の道路幅とを比較し、異なれば算出した道路幅で地図情報の道路幅を更新する。
(もっと読む)
GPSロストの予測方法、GPSロストの予測装置及び車両用走行制御装置
【課題】 GPSロストに対してドライバが余裕を持って対応することができるようにする。
【解決手段】 自車両前方の撮像画像において、予め設定した経路上前方距離だけ前方の地点に開空率検出領域Adを設定し(ステップS1〜S3)、この開空率検出領域Ad内の画像に基づいて、前記前方地点に自車両が到達したときの将来開空率を予測する。例えば、開空率検出領域Adにおいて、空の領域の面積を検出し、この開空率検出領域Adにおける前方開空率を算出し、これを将来の開空率をする(ステップS4)。この将来の開空率がそのしきい値以下であるとき、GPSロストが生じると判断し(ステップS6)、これをドライバに通知する(ステップS8)。
(もっと読む)
1,921 - 1,940 / 2,058
[ Back to top ]