
Fターム[2F129GG18]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援機器 (2,561) | レーダー (471)
Fターム[2F129GG18]に分類される特許
1 - 20 / 471
車内情報提供装置および方法
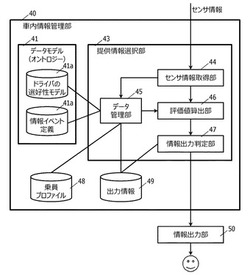
【課題】情報に対するユーザの価値観を反映させて提供する情報を適切に選択する。
【解決手段】車内情報提供装置は、情報が乗員に与える影響度を複数の属性について定義した影響度情報を、提供する情報と関連づけて記憶する情報定義記憶手段と、乗員が前記複数の属性をそれぞれどの程度重要視するかを表す重み係数を記憶する選好性定義記憶手段と、提供すべき候補の情報のうち、前記情報定義記憶手段に記憶された各属性についての情報の影響度と前記選好性定義記憶手段に記憶された各属性についての乗員の重み係数とに基づいて算出される評価値が所定の閾値以上である情報を、乗員に提供するものとして選択する情報出力判定手段と、前記情報出力判定手段によって選択された情報を乗員に提供する情報出力手段と、を備える。
(もっと読む)
周辺監視装置

【課題】運転者のニーズを見越して周辺映像を適切に表示可能な周辺監視装置を提供する。
【解決手段】周辺監視カメラ11により撮影された周辺映像を表示する装置であって、周辺映像を表示する表示装置15と、運転操作の意図を検知する検知部21と、運転操作の実施を判定する判定部22と、運転操作の意図が検知されると、周辺映像を縮小表示し、運転操作が開始されると、周辺映像を拡大表示し、運転操作が収束すると、周辺映像の表示を終了するように、表示装置15を制御する表示制御部23とを備える。よって、運転操作の開始前に周辺映像の表示を開始し、運転操作の終了前に周辺映像の表示を終了するので、運転者のニーズを見越して周辺映像を適切に表示することができる。
(もっと読む)
ナビゲーション装置
【課題】表示部において実写映像に重ねて表示される経路誘導マーク画像によって利用者が当該実写映像中の前方車両の部分に対する注意が散漫になることを防止することのできる「ナビゲーション装置」を提供することである。
【解決手段】表示部13に経路誘導マーク画像を予め定めた第1画像濃度にて車両前方の実写映像に重ねて表示させ、経路に沿った車両運転を支援するナビゲーション装置であって、表示部13において前記経路誘導マーク画像を前記実写映像に重ねて表示させる際に、自車の前方に車両が存在する状況であるか否かを判定する前方状況判定手段(S12)と、自車の前方に車両が存在する状況であると判定されたときに、表示部13において前記実写映像に重ねて表示される前記経路誘導マーク画像を前記第1画像濃度より低い第2画像濃度にて調整するマーク画像濃度調整手段(S16)とを有する構成となる。
(もっと読む)
ナビゲーション装置
【課題】装置構成が複雑化したり、装置構成に要する費用が嵩むことを防止しつつ、信号機の位置を精度良く検出する。
【解決手段】ナビゲーション装置10は、車両の加速度の周波数分析から周波数に対応するパワースペクトルを算出する周波数分析部26と、パワースペクトルに基づき渋滞予兆度を算出する渋滞予測部29と、地図データ記憶部11に記憶された信号機の位置情報および現在位置検出部23により取得された車両の現在位置に基づき、信号機が現在位置から所定範囲内に存在するか否かを判定する位置判定部24と、を備える。渋滞予測部29は、予め渋滞予兆度の大小と現在位置から信号機までの距離の長短との相関を示すデータを記憶し、信号機が現在位置から所定範囲内に存在する場合に、渋滞予兆度に応じて現在位置から信号機までの距離を推定する。
(もっと読む)
魚探映像表示装置、魚群探知装置、目的地指定プログラム、及び目的地指定方法
【課題】魚探映像を表示するとともに、過去に取得した魚探映像が示す位置を目的地とする自動操舵を簡単な操作で行わせることができる魚探映像表示装置を提供する。
【解決手段】タッチパネル装置(魚探映像表示装置)11は、記憶部23と、表示部21と、制御部25と、を備える。記憶部23は、魚群探知機14が水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する。表示部21は、探知データで構成される魚探映像を表示する。制御部25は、表示部が表示する映像に対する指定操作が行われた場合に、指定された部分を構成する探知データに対応する位置を求め、当該位置を目的地とする自動操舵を自動操舵装置16に行わせる。
(もっと読む)
車載用電子機器及びプログラム
【課題】表示手段及び操作スイッチ類を構成から排除して、ノイズの影響を低減するとともに、GPSアンテナや各種センサ類の効果的な配置を実現することができ、部品及び開発コストを削減して安価に製造することが可能な車載用電子機器を提供する。
【解決手段】車両に搭載され、当該車両又は車両周辺に関する車両関連情報に基づいて生成した情報を、携帯端末200を用いて報知させる車載用電子機器100であって、車両関連情報を取得するための取得手段21〜24と、携帯端末200との間で情報の送受信を行うための無線通信部16と、これら取得手段及び無線通信部16を制御する制御部26と、を備え、制御部は、取得手段を介して車両関連情報を取得する制御と、車両関連情報に基づいて生成した携帯端末向け情報を、携帯端末側へ送信する制御と、携帯端末向け情報に基づいて生成された制御情報を、携帯端末側から受信する制御と、制御情報に基づく所定の処理を実行する制御と、を行う。
(もっと読む)
音楽再生装置及び音楽再生方法
【課題】適切な運転をしているときにお気に入りの曲が再生される確率を増加させることが可能な音楽再生装置を提供する。
【解決手段】 再生期間に、複数の楽曲のそれぞれに付加された重み付けに応じた確率で楽曲を選択する楽曲選択部12と、再生期間中に所定の間隔で自車の走行環境及び運転状態を取得する運転情報取得部14と、走行環境での運転の評価基準に基づいて、運転状態が適切かを所定の間隔毎に評価し、再生期間中において所定の間隔毎に評価された結果に基づいて、再生期間中の自車の運転が適切であったかを判定する運転判定部16と、再生期間中の運転が適切であった場合、複数の楽曲の中のお気に入り曲の重み付けを増加させる重み付け変更部18とを備える。
(もっと読む)
制御システム及びプログラム
【課題】従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できる制御システム等を提供する。
【解決手段】GPS警報機能に急激なスピード変化をしたポイントを、第一の処理として急ブレーキ発生ポイントとして記憶させ、第二の処理として次回このポイントに接近した場合に○○m先急ブレーキ発生ポイントです。ご注意下さい。”等の警報を行う急ブレーキ発生ポイント警報機能を付加している。
(もっと読む)
運転支援装置、及び錘部材
【課題】運転者が容易かつ確実に導入することが可能であり、運転者の使い勝手がよく、報知された情報等をユーザが確実に認識できる運転支援装置、及び錘部材を提供する。
【解決手段】運転支援装置1は、ワイヤクリップ21がヘルメット71の側面を挟持することによって、ヘルメット71の側面かつ下端部に着脱可能に装着される。運転支援装置1は、GPS衛星から送信された電波を受信することによって、位置座標を取得することができる。運転支援装置1は、ケーブル43を介してスピーカ44と接続している。運転支援装置1は、取得した位置座標に基づいて交通監視情報を特定し、スピーカ44を介して、特定した交通監視情報の音声を出力する。自動二輪車等を運転する運転者は、交通監視情報を認識し、交通安全に配慮して運転を行うことができる。
(もっと読む)
電力送受電システム
【課題】電力の過不足が生じる時に、電力の送受電を行う対象車両が、極力、互いに無駄なルートを走行せずに出会うことができるように、充電要求車両と放電要求車両とのペアリングを行う電力送受電システムを提供する。
【解決手段】情報センター13が、データベース43に、充電要求車両と放電要求車両とに分類しつつ、各車両の現在位置、進行方向及び目的地に関する情報を記録しておく。従って、データベース43に記録された情報に基づいて、各車両が、将来、走行する道路を予測することができる。このため、同時期に共通のエリアを走行し得る充電要求車両と放電要求車両とをペアリング車両として抽出することが可能になる。この結果、ペアリングされる充電要求車両及び放電要求車両とも、極端な迂回ルートを取らずに、送受電を行う相手車両に出会うことが可能になる。
(もっと読む)
割り込み制御装置および割り込み制御方法
【課題】優先度の高い割り込み情報については適時の出力タイミングを逸しないようにしつつ、割り込み情報の出力が中断される状況を少なくしてユーザに与えるストレスを小さくできる「割り込み制御装置および割り込み制御方法」を提供する。
【解決手段】割り込み音声が出力されている期間中に割り込み音声の優先度の値を上げていく優先度設定部11と、2つ以上の割り込み音声の割り込みが重複して発生したときに、当該2つ以上の割り込み音声に対して設定された優先度に従って、より優先度の値が大きい割り込み音声を優先して出力するように制御する音声出力制御部13とを設け、割り込み音声の出力中に他の割り込み音声の割り込みが発生した場合に、出力中の割り込み音声の元々の優先度が他の割り込み音声の優先度より低くても、出力中の割り込み音声の方が優先度が高くなる状態を作り出すことができるようにする。
(もっと読む)
車載用電子機器及びプログラム
【課題】従来よりも使い勝手のよいレーダー探知機、ナビゲーション装置等の車載用電子機器を提供する。
【解決手段】 検索の開始位置から検索の終了位置にいたる経路を、記憶手段に記憶された経路検索のための道路位置情報と警告箇所に関する情報を含む地図情報に基づいて検索し、検索された経路の少なくとも一部を表示し、現在位置と前記記憶手段に記憶された警告箇所に関する情報とに基づいて警告を発する機能を持つ。警告箇所に関する情報として、警告箇所の位置情報とともに当該警告箇所の位置情報に対応づけて警告の種別を記憶し、検索された経路を通過する際に必要となる警告箇所を表示して、表示した警告箇所の表示態様を、交通監視ポイント種別指定部56の種別ボタン57a〜dのタッチによるユーザからの入力に基づき、警告の種別毎に一括して切り替える機能を備える。
(もっと読む)
情報提供装置
【課題】ユーザによる情報の入力回数を抑制することができる情報提供装置を提供する。
【解決手段】少なくとも車両100の速度を含む車両情報を検出する車両情報検出手段と、地図データ上でPOI情報を管理するデータベース7と、車両情報検出手段により検出された車両情報に基づいて、車両100が接近した車両接近場所を特定する接近場所特定手段と、車両接近場所に含まれるPOI情報からユーザの要求を推定する要求推定手段と、データベース7に含まれるPOI情報から、要求推定手段により推定されたユーザの要求と関連するPOI情報を検索するPOI情報検索手段と、POI情報検索手段により検索された検索結果をユーザに報知する報知手段とを備える。
(もっと読む)
車両用無線通信装置および通信システム
【課題】車車間通信によって情報を送信する場合に、輻輳を抑えながらも、情報を必要に応じた頻度で送信することを可能にする。
【解決手段】自車両の直近の後続車両に搭載される無線通信装置1から受信したセンサ状態情報が、「搭載有」且つ「検出成功」の場合には、自装置から情報を送信する送信周期を基準間隔よりも長くする一方、当該センサ状態情報が「搭載無」や「搭載有」且つ「検出失敗」の場合には、送信周期を基準間隔とするように制御部12で送信周期を制御する。
(もっと読む)
走行制御装置
【課題】自車走行路の制限速度を的確に推定する。
【解決手段】フロントカメラ4およびリアカメラ5による撮像画像情報を画像処理し、走行車線の幅員、走行車線の左右の区画線の線種、左側の歩道と車道外側線部間(路肩)の幅員、中央帯の幅員などを検出する。これら情報とナビゲーション装置2からの道路種別情報とから自車走行路の“道路の区分”を予測し、この“道路の区分”に対して予め規定されている設計速度を推定する(ステップS1〜S5)。さらに、ナビゲーション装置2から道路勾配および道路曲線半径情報を獲得し、自車走行路の道路勾配および道路曲線半径に対して予め規定されている設計速度を推定する(ステップS6、S7)。そして、“道路の区分”および道路勾配、道路曲線半径に基づき推定した設計速度から自車走行路の設計速度を推定し、これを自車走行路の推定制限速度とする(ステップS8)。
(もっと読む)
運転支援装置
【課題】車線変更を考慮した適切な走行ができるように運転を支援する。
【解決手段】自車両が走行する道路の車線変更規制区間の情報を含む道路情報を取得する道路情報取得手段14と、道路情報取得手段14により取得された車線変更規制区間の情報に基づいて、自車両の走行地点の前方所定距離内に車線変更規制区間の起点又は終点が存在するか否かの判定を行う判定手段20eと、判定手段20eにより起点又は終点が存在すると判定されたら起点又は終点の情報を報知する報知手段17,18とを備える。
(もっと読む)
電子機器及びプログラム
【課題】位置情報や移動速度を取得できない状況であっても、的確に目的物の設置位置に関する情報の報知を行なう。
【解決手段】トンネルや高架下でレーダー探知機がGPS衛星からの電波を受信できなくなった場合には、三軸加速度センサの出力(検出値)を取得する(S31)。次いで、三軸加速度センサの出力(検出値)の振幅を一定時間平均化する(S32)。現在が停止状態(0km)で、S32で平均化した値が、0.017G以上であれば(S34:YES)、現在は移動状態であると判定する(S34)。また、現在が移動状態で、S32で平均化した値が、0.009G以下が3秒以上継続した場合は(S33:NO,S35:YES)、現在は停止状態であると判定する(S36)。
(もっと読む)
移動体位置検出装置
【課題】移動体の進行方向を、簡便な手法によって精度よく検出することができるようにする。
【解決手段】物体検出センサ1によって、移動体としての車両V周囲の物体が検出される。GPS3によって、誤差を含んだおおまかな車両Vの位置、方位が測位される。地図データ4と物体検出センサ1で検出された検出データとを、直交座標系を用いてマッチングさせて、車両Vの現在位置の測位が行われる。車両Vの位置を原点とする極座標系を用いて、地図データと検出データとをマッチングさせて、車両Vの進行方向が決定される。
(もっと読む)
移動体位置検出装置
【課題】マップマッチングによる移動体の現在位置の測位を、車両のロールあるいはピッチングを加味しつつ簡便かつ精度よく行えるようにする。
【解決手段】移動体としての車両Vに、道路周辺の物体を検出する物体検出センサ1が設けられる。車両Vの現在位置の測位に先立って、物体検出センサ1によって検出された垂直線分を有する固定物を利用して、車両Vのロール角が検出される。また、水平線分を有する固定物を利用して、車両Vのピッチング角が検出される。物体検出センサ1で検出された固定物の位置情報が、決定されたロール角とピッチング角とに基づいて、車両Vが水平状態にあるときの位置情報に変換される(補正)。
(もっと読む)
移動体位置検出装置
【課題】マップマッチングによる移動体の現在位置の測位を、車両の進行方向を加味しつつ簡便かつ精度よく行えるようにする。
【解決手段】移動体としての車両Vに、道路周辺の物体を検出する物体検出センサ1が設けられる。車両Vの現在位置の測位に先立って、物体検出センサ1によって検出された所定の固定物についての検出データと地図データとをマッチングさせることにより、車両Vの進行方向の補正が行なわれる。補正された後の車両Vの進行方向に基づいて、移動体の現在位置の測位のためのマッチングが行われる。
(もっと読む)
1 - 20 / 471
[ Back to top ]