
Fターム[2F129HH24]の内容
航行(Navigation) (246,646) | 構造・構成 (43,107) | データベース (1,373)
Fターム[2F129HH24]の下位に属するFターム
データ構造 (1,061)
Fターム[2F129HH24]に分類される特許
41 - 60 / 312
車載用ナビゲーション装置及びプログラム
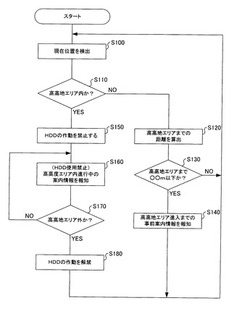
【課題】高高地を走行中、あるいは高高地へ進入する前において、高高地でハードディスクドライブが作動しないことに起因する機能制限を補うための情報提供を行うための技術を提供する。
【解決手段】現在位置が高高地エリア内であると判定している間(S110:YES,S170:NO)、ハードディスクドライブの作動を禁止し(S150)、地図表示の代わりに当該高高地エリアから脱するまでの距離や、目的地までの距離・方向等の案内情報を表示や音声により報知する(S160)。一方、現在位置が高高地エリアではないと判定している間(S110:NO)に高高地エリアへ所定の距離まで接近した場合(S130:YES)、現在地付近に存在する高高地エリアまでの距離・方向や、地図が表示されなくなる区間の長さ等の事前案内情報を、当該高高地に進入する事前に表示や音声にて報知する(S140)。
(もっと読む)
トイレナビゲーションシステム

【課題】GPS機能を備えた携帯電話を使用して、使用者の希望条件に合った現在位置に近いトイレを検索し、そのトイレまで自動で案内することができるトイレナビゲーションシステムを提供する。
【解決手段】地図データベース1とトイレ情報データベース2とを備えたホストシステム3と、ホストシステム3から地図データおよびトイレ情報を受信する携帯電話4とが、無線回線およびネットワーク7を介して接続され、ホストシステム3にトイレ5を管理するためのトイレ管理装置がネットワーク7を介して接続されるトイレナビゲーションシステムであって、携帯電話4は、ホストシステム3から、トイレ検索要求情報に基づく検索結果を受信すると、現在位置情報と検索結果の位置情報とからトイレ5までの到達時間を計算する手段と、到達時間が短いものから順番に検索結果のトイレ5を表示する手段等を備えている。
(もっと読む)
画像認識装置及びナビゲーション装置
【課題】夜間走行時にも前方車両がブレーキ操作を行った場合にも、その前方車両を的確に画像認識手法により認識でき、さらに、前方車両の車種を的確に識別することができる技術を得る。
【解決手段】自車両の周辺の画像情報を取得する画像情報取得手段と、取得された画像情報から、自車両の周辺に存する他車両の画像を抽出する他車両画像抽出手段12と、抽出された画像から当該他車両の車両ランプ内に備えられる光源の配列を画像認識するとともに、当該画像認識された車両ランプ内における光源の配列に基づいて他車両の車両情報を得る車両情報取得手段18を備え、得られた車両情報を出力する。
(もっと読む)
ナビゲーション装置及びナビゲーションプログラム
【課題】現在位置情報が有する誤差の影響を抑制して高精度な目的地到着判定を行うことを可能とすることにより、ユーザを適切に目的地まで誘導することのできるナビゲーション装置及びナビゲーションプログラムを提供する。
【解決手段】目的地が設定された際に、当該目的地までの経路の案内を行うナビゲーション装置であって、自車位置周辺の画像情報を取得する画像情報取得手段6と、前記画像情報に含まれる地物の画像認識を行う画像認識手段8と、地物の位置及び形態に関する情報を含む地物情報を取得する地物情報取得手段4と、前記地物情報取得手段により取得される前記地物情報に基づいて、前記目的地から近接距離内に存在する一又は二以上の地物を判定地物として決定する判定地物決定手段5と、前記画像認識手段により当該判定地物が画像認識された際に、前記目的地に到着したと判定する到着判定手段9と、を備える。
(もっと読む)
情報収集・配信システム、情報収集・配信サーバ、ユーザ端末装置、及び情報収集・配信方法
【課題】空車タクシーにいち早く乗車できる可能性が高い場所又は道路を提示するシステムを提供する。
【解決手段】タクシー端末装置40と、情報収集・配信サーバ30と、ユーザ端末装置20と、を備えた情報収集・配信システム10であって、タクシー端末装置40は空車判別手段44によって自車の空車状態を検出した場合に現在位置検出手段43が検出した走行位置を含むタクシー情報を情報収集・配信サーバ50に送信し、情報収集・配信サーバ50は、空車タクシー情報データベース60と空車タクシー情報抽出手段54とを備え、ユーザ端末装置20の空車タクシー情報要求手段24が所定エリアの空車タクシーの情報に関する問合せを情報収集・配信サーバに50行うと、情報収集・配信サーバ50の空車タクシー情報抽出手段54は、空車タクシー情報データベース60を参照して所定エリアのタクシー走行頻度を抽出して配信しユーザ端末装置20に案内する。
(もっと読む)
地物情報提供装置及び方法等
【課題】比較的簡易な構成で地物案内の精度を高めること。
【解決手段】本発明による地物情報提供装置は、自車位置を取得する自車位置取得手段と、自車前方の地物に関する情報を取得する地物情報取得手段と、前記自車位置取得手段により取得された自車位置と、前記地物情報取得手段により取得された地物情報とに基づいて、自車が接近している地物に関して地物案内を実施する地物案内手段とを備え、前記地物案内手段は、前記地物情報取得手段により地物情報が取得された地点又は時点から所定走行距離以上自車が走行し又は所定走行時間以上自車が走行し、且つ、自車が地物に対して所定距離内又は所定到達時間内に位置する場合に、前記地物案内を実施する。
(もっと読む)
地図表示装置
【課題】特定地域の地図データを読み出すことが可能な状態で地図表示装置が特定地域外へ持ち出されることを未然に防止できるようにする。
【解決手段】現在位置が特定地域の境界付近にあるか否かを判定し(S100)、現在位置が特定地域の境界付近にあると判定された場合、記憶装置11に記憶された地図データの読み出しを不能にするか否かをユーザに確認する確認画面を表示させ(S102)、ユーザ操作に応じて地図データの読み出しを不能にすることが許可されたことを判定した場合(S104でYESと判定)、記憶装置11に記憶された地図データの読み出しを不能にするための処理を実施する(S108)。
(もっと読む)
ナビゲーション装置、ナビゲーション方法及びナビゲーションプログラム
【課題】小さい分岐角度を有する分岐においても、従来に比較してより正確に自車位置を算出する。
【解決手段】ナビゲーション装置は、現在位置情報算出部21とY字分岐判定部22とを備える。現在位置情報算出部21はGPS衛星からの無線信号に基づいて現在位置Pを測位し、所定の地図データと現在位置Pとに基づいて地図データ上の自車位置Qを特定する。Y字分岐判定部22は、測位された現在位置Pから進行方向の所定範囲内に分岐元道路候補から分岐道路候補が分岐する分岐点を有する分岐が存在するか否かを判断し、分岐が存在するとき、現在位置Pと当該現在位置Pに対応する自車位置Qが存在する分岐元道路候補の道路リンクとの距離D2と、現在位置Pと当該現在位置Pに対応する仮想自車位置Rが存在する分岐道路候補の道路リンクとの距離D3とを算出し、距離D2と距離D3とを比較することにより、分岐道路候補に進入したか否かを判定する。
(もっと読む)
車両位置特定システム、車載機、送信機、時刻補正システム及び時刻補正装置
【課題】自車の走行位置を精度良く特定することができる車両位置特定システム、車載機、送信機、時刻補正システム及び時刻補正装置を提供する。
【解決手段】車載機30が光ビーコン10との通信可能な領域Rに進入した場合、車載機30は、自車位置を測位する。車載機30は、領域Rを通過した直後(領域Rを通過して時間経過が短い時)、送信機20が送信した信号を受信し、車載機30と送信機20との時刻を擬似的に同期させる。その後、車載機30は、送信機20が送信した信号を受信し、受信した信号に基づいて自車位置を特定する。自車位置は、例えば、送信機20(又は停止線P)からの距離により特定することができる。
(もっと読む)
車両用ナビゲーション装置
【課題】車両内部で有する情報と車両外部の情報に基づいた情報のいずれをも用いて、チャイルドプルーフ機構の自動制御を行うことが可能な車両用ナビゲーション装置を提供する。
【解決手段】車両のドアに備えられ、車両内部からの当該ドアの開操作を禁止するチャイルドプルーフ機構と、車両の現在位置を検出する位置検出手段と、道路地図データを記憶する道路地図データ記憶手段と、車両の現在位置が道路地図上の予め定められた領域に含まれる場合、チャイルドプルーフ機構を自動的に作動させるチャイルドプルーフ機構作動制御手段と、を備えることを特徴とする車両用ナビゲーション装置として提供可能である。
(もっと読む)
経路探索装置、交通シミュレーション装置、歩行者挙動予測装置、及びプログラム
【課題】歩行者が現実に選択する経路を探索することができるようにする。
【解決手段】経路候補生成手段によって、地図情報に基づいて、歩行者の出発地から目的地までの経路の候補を複数生成する。そして、算出手段によって、歩行者の移動場所の複数の種類の各々に対して予め定められた移動するときの危険度に基づいて、経路生成手段によって生成された経路の候補の各々について、経路の候補上に存在する移動場所の種類に応じた総危険度を算出する。従って、経路の候補の各々の危険度を考慮して、経路を選択することができるため、歩行者が現実に選択する経路を探索することができる。
(もっと読む)
自車位置認識装置及び自車位置認識プログラム
【課題】自車両の進路変更動作の検出結果を用いて、自車位置情報を適切に補正することが可能な自車位置認識装置及び自車位置認識プログラムを提供する。
【解決手段】自車両Cの過去の進路変更動作を学習して生成され、自車両Cの進路変更動作が行われた進路変更交差点Nを特定可能な進路変更情報と、当該進路変更動作より前に画像認識された対象地物f1の認識位置から自車両Cの進路変更動作が行われた位置までの距離情報とを有する進路変更学習情報を用い、対象地物f1が画像認識された場合に、当該対象地物f1についての進路変更学習情報に基づいて、自車位置情報Pに基づく当該対象地物f1の認識位置から前記距離情報に示される距離だけ進行した位置が、進路変更情報により特定される進路変更交差点Nの道路情報中の位置と一致するように自車位置情報Pを補正する。
(もっと読む)
車両挙動学習装置及び車両挙動学習プログラム
【課題】特定の位置において検出される自車両の挙動を高精度に学習することが可能な車両挙動学習装置及び車両挙動学習プログラムを提供する。
【解決手段】挙動検出手段により検出された自車両Cの挙動と、当該挙動の検出より前に画像認識手段により認識された対象地物f1との関係を表す関係情報Brを取得し、前記挙動検出手段により検出された自車両Cの挙動の属性を表す挙動属性情報Baと、当該挙動について取得された関係情報Brとを含む検出挙動情報Bを検出挙動記憶手段に記憶し、前記検出挙動記憶手段に記憶された記検出挙動情報Bに基づいて、対象地物と関係付けられた自車両の挙動の学習結果を表す学習挙動情報Sを生成する。
(もっと読む)
運転支援装置及びナビゲーション装置及びコンピュータプログラム
【課題】蓄電部の蓄電電力を利用して走行する車両において、車両の走行速度を考慮して運転者の運転を適切且つ正確に支援することができる運転支援技術を実現する。
【解決手段】蓄電部31の蓄電電力を利用して走行する車両において、運転者の運転を支援する運転支援装置1であって、互いに制限速度が異なる複数のレーンを有する特定道路を走行するにあたり、当該複数のレーンの夫々の制限速度に関するレーン制限速度情報を取得する手段21と、複数のレーンの夫々の制限速度と、消費電力量と走行距離との関係を表す走行効率の車両の走行速度に対する相関関係を示す速度効率関数Kとに基づいて、蓄電部31の蓄電残量で走行可能な走行可能距離が適切なものとなるレーンを推奨レーンとして決定する手段22と、車両を推奨レーンに誘導するための推奨レーン誘導情報を運転者に通知する手段23とを備える。
(もっと読む)
道路勾配測定装置、道路勾配測定方法及びコンピュータプログラム
【課題】車重等を検出するための高額なセンサを必要とすることなく、地図情報中に勾配に関する情報が含まれていない道路に対しても、正確な勾配を測定することが可能な道路勾配測定装置、道路勾配測定方法及びコンピュータプログラムを提供する。
【解決手段】勾配が予め測定されている参照用道路を車両が走行した走行履歴から、車重Mや転がり抵抗係数μr等の車両に関する各種車両パラメータを算出し(S3)、算出された各種車両パラメータと非参照用道路を走行した走行履歴に基づいて非参照用道路の勾配を算出する(S6)ように構成する。
(もっと読む)
交通情報配信システム、ナビゲーション装置、配信サーバ
【課題】ユーザが交通情報を必要としない状況では、配信サーバからナビゲーション装置へ交通情報を配信しないようにする。
【解決手段】配信サーバにおいて、ナビゲーション装置からの配信要求に応じて、基準所要時間と現在所要時間とを比較し、その比較結果に基づいて、交通情報を配信する必要があるか否かを判定する(ステップS215)。配信する必要ありと判定した場合は、登録ルートについての詳細交通情報をナビゲーション装置に配信する(ステップS216)。配信する必要なしと判定した場合は、登録ルートについての詳細交通情報をナビゲーション装置に配信しない。
(もっと読む)
ナビゲーションシステム、経路探索サーバおよび携帯端末装置ならびに経路探索方法
【課題】目的地として設定した地点がGPS測位の不能な地点である場合に、目的地周辺のGPS測位が可能な地点を経路探索のための目的地として再設定できるようする。
【解決手段】経路探索サーバ30は、目的地がGPS測位可能な地点か否かを検証する目的地検証手段32と、目的地がGPS測位の不可能な地点である場合に、経路探索条件として設定された目的地を再設定するための目的地再設定要求手段33と、を備え、目的地検証手段32が、目的地がGPS測位可能な地点でないと判定した場合に、目的地再設定要求手段33は、目的地をGPS測位可能な地点を再設定するためのメッセージを含む目的地再設定要求を携帯端末装置20に送信し、携帯端末装置20は目的地をGPS測位可能な地点に再設定する。
(もっと読む)
ナビゲーション装置
【課題】ナビゲーション装置を複数人の利用者が使用する場合であっても、この利用者に応じて最適な経路案内を行う。
【解決手段】利用者識別番号と身体特徴データと身体状態データとを記憶する利用者情報記憶手段30と、利用者識別番号と走行履歴データとを記憶する走行履歴記憶手段40と、記憶された身体特徴データと利用者情報取得装置2により検出された身体特徴データとが一致する場合にはこれに対応する利用者識別番号を抽出する利用者特定手段20と、この利用者識別番号に対応する走行履歴データを走行履歴記憶手段40から抽出する利用者走行履歴取得手段50と、利用者識別番号に対応する身体状態データを利用者情報記憶手段30から抽出し、この抽出した身体状態データに基づいて利用者の体調の良好基準範囲を決定し、検出された身体状態データが良好基準範囲外の場合は、利用者の体調に応じた経路を検索する経路探索手段80とを備える。
(もっと読む)
駆動源制御装置
【課題】次回走行を開始させたときのエンジン停止不可期間において発電される電気エネルギーを有効利用できるようにする駆動源制御装置を提供すること。
【解決手段】目標バッテリ残量に応じてハイブリッド車両の駆動源を制御する駆動源制御装置1は、次回走行を開始させたときのエンジン停止不可期間における発電量を予測する発電量予測手段13と、発電量予測手段13による予測結果に基づいて現走行終了時の目標バッテリ残量を設定する目標バッテリ残量設定手段14とを備える。また、駆動源制御装置1は、現走行終了時のバッテリ残量を目標バッテリ残量に合わせるよう走行経路に応じて駆動源を割り当てながらハイブリッド車両の走行計画を生成する走行計画生成手段11を更に備え、走行計画生成手段11が生成した走行計画に沿ってハイブリッド車両の駆動源を制御する。
(もっと読む)
車両挙動学習装置及び車両挙動学習プログラム
【課題】道路上の特定の位置における頻度の高い車両の挙動を、高い位置精度を伴って学習することが可能な車両挙動学習装置を提供する。
【解決手段】自車位置情報Lと、自車両の周辺の画像情報Gと、自車両の周辺の地物情報Fとを取得し、画像情報Gに含まれる対象地物の認識処理が行われる。挙動検出手段7は、画像認識に成功した位置から所定範囲内の自車両の挙動を検出する。検出結果を表す挙動検出情報Bは、検出位置の情報と関連づけて検出結果記憶手段8に記憶される。学習挙動抽出手段29は、自車両が同じ場所を複数回通行することにより検出結果記憶手段8に記憶された、同じ自車両の挙動についての複数の挙動検出情報Bに基づいて、繰り返し検出される自車両の挙動を学習挙動として抽出し、学習挙動の属性情報及び位置情報を対応する対象地物の地物情報Fと関連づけた学習挙動情報Rとして出力する。
(もっと読む)
41 - 60 / 312
[ Back to top ]