
Fターム[2G021AB10]の内容
Fターム[2G021AB10]に分類される特許
1 - 20 / 41
車両計量装置
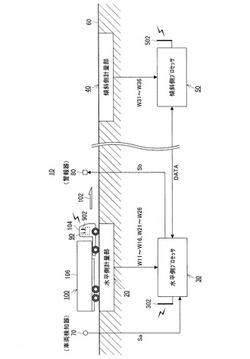
【課題】 車両の重心高さを効率よく求める。
【解決手段】 本発明に係る車両計量システム10は、例えば輸送業者の敷地内の通行路60に沿って直列に配置された水平側計量部20と傾斜側計量部40とを備えている。被計量物としての車両100は、水平側計量部20を通行する際には水平姿勢となり、傾斜側計量部30を通行する際には傾斜姿勢となる。そして、これら水平側計量部20を構成する複数のロードセルから得られる荷重検出値W11〜W16およびW21〜W26と、傾斜側計量部40を構成する複数のロードセルから得られる荷重検出値W31〜W36と、に基づいて、車両100の総重量値や当該車両100の重心位置,重心高さ等の重心情報が求められる。つまり、車両100にとっては、言わば通行路60を通行するだけで、総合的な計量が実現される。
(もっと読む)
軸受劣化判断方法と装置

【課題】回転体のアンバランス修正において、軸受の劣化によるアンバランス修正精度の低下を防止できるようにすることにある。
【解決手段】影響係数の変動を検出するために変動追跡処理を時間間隔を置いて行う。最初の変動追跡処理で取得した影響係数を初期影響係数とする(S1)。2回目以降に行う各変動追跡処理(S8〜S11)では、当該処理で取得した影響係数と初期影響係数とのずれを求め、このずれが許容値より大きいかどうかを判断する(S9)。この判断に基づいて軸受の劣化を示す劣化通知信号を出力する(S11)。
(もっと読む)
トラックスケールにおける被計量車両の重心位置計測装置
【課題】既存のトラックスケール(演算処理装置を含む)に簡単な構成を付加することで、被計量車両の計量時に該被計量車両の重心高さ位置も同時に計測し得るようにする。
【解決手段】計量台10として、車両の全輪を同時に載せ得る面積の平坦面11とその前方位置に所定高さ段上げした前輪載せ台12を設けたものを使用し、被計量車両の前輪位置と後輪位置を検出し得る車輪位置検出器8を有し、演算処理装置3に、前後変位量算出手段と、車軸間距離算出手段21と、車両傾斜角算出手段22と、前輪軸重算出手段23Aと、後輪軸重算出手段23Bと、前後重心位置算出手段24と、記憶手段32と、前後重心変位量算出手段25と、車両重心高さ位置算出手段26とをそれぞれ備え、平坦面11上で算出した前後重心位置情報と前輪を前輪載せ台12上に載せた状態での前後重心位置情報とから算出された重心変位量と、車両傾斜角算出手段22で算出された車両傾斜角とから、被計量車両の重心高さ位置を算出するようにしている。
(もっと読む)
影響係数取得方法
【課題】同じ機種である複数の回転機械に対してバランス修正を行う場合に、各回転機械のバランス修正を高精度に行うことを可能にする影響係数を効率的に取得する。
【解決手段】回転機械の回転体を回転させ振動データを生成し(ステップS1)、生成した振動データと基本影響係数とに基づいてアンバランスデータを算出し(ステップS2)、アンバランスデータに基づいて回転体を切削し(ステップS3)、その後、回転機械の回転体を回転させ、振動データを生成し(ステップS4)、生成した振動データと切削のデータと影響係数との関係式を取得する(ステップS7)。同じ機種の複数の回転機械についてそれぞれ取得した複数の関係式に基づいて、当該機種に関する新たな影響係数を求める。
(もっと読む)
影響係数取得方法
【課題】回転体における2つの切削対象部をそれぞれ切削することで回転体のバランス修正を行う場合に、試し錘を使用することなく、精度のよい影響係数を取得する影響係数取得方法を提供する。
【解決手段】互いに異なる条件で得られた回転体の第1および第2の振動データと、第1および第2の切削対象部におけるバランス変化に対する回転体の振動変化を示す基本影響係数とに基づいて、第1および第2の切削対象部に対応する第1および第2のアンバランスデータを算出し、当該データに基づいて回転体を切削してバランス修正を行う(ステップS1、S2、S4)。バランス修正の過程で得た振動データと切削のデータとに基づいて、新たな影響係数を算出する(ステップS9)。
(もっと読む)
重心位置測定装置
【課題】リアルタイムに積荷の三次元重心位置を測定することができる重心位置測定装置を提供する。
【解決手段】車両1の荷台11の上方に配され、積荷26が載置される載台25と、車両1の幅方向および全長方向にそれぞれ所定の間隔を存して配され、載台25を水平方向に自由振動可能に支持するロードセル21〜24と、水平方向に自由振動状態にある載台25の変位および加速度をそれぞれ検出する変位センサ35および加速度センサ36と、ロードセル21〜24からの荷重信号に基づいて載台25上における積荷26の水平面的重心位置を演算する水平面的重心位置演算部50と、ロードセル21〜24からの荷重信号と変位センサ35および加速度センサ36からの検出信号とに基づいて載台25上における積荷26の重心高さを演算する重心高さ演算部51とを備えるものとする。
(もっと読む)
重心位置測定装置
【課題】簡易かつ安価な構成で車両の水平面的重心位置を測定することのできる重心位置測定装置を提供する。
【解決手段】車両3の左右全ての車輪が載ることのできる計量載台13と、計量載台13を支持する複数のロードセル21〜24と、計量載台13に対する車両3の幅方向の相対位置を検出するとともに、車両3の車輪が所定位置を通過したことを検知するトレッドセンサ11,12と、複数のロードセル21〜24からの荷重信号とトレッドセンサ11,12からの検出信号とに基づいて車両3の幅方向の重心位置を演算する車両幅方向重心位置演算部50と、複数のロードセル21〜24からの荷重信号とトレッドセンサ11,12からの検知信号とに基づいて車両3の全長方向の重心位置を演算する車両全長方向重心位置演算部51とを備えるものとする。
(もっと読む)
車両計量装置
【課題】 被計量物としてのトラックの重心高さを含む重心情報を正確に求める。
【解決手段】 本発明に係るトラックスケールの計量部30は、概略矩形平板の計量台32と、この計量台32を水平に支持する4つのロードセル34,34,…と、当該計量台32の上面に設けられた傾斜ブロック36,36,…と、を備えている。トラックは、計量台32の上面に直接載置されることによって、水平載置状態とされ、傾斜ブロック36,36,…上に載置されることによって、傾斜載置状態とされる。それぞれの状態にあるときの各ロードセル34,34,…による荷重検出値に基づいて、トラックの総重量値と、重心の位置と、当該重心の高さと、が求められる。なお、水平載置状態および傾斜載置状態のいずれにおいても、計量台32および各ロードセル34,34,…の姿勢は不変である。
(もっと読む)
安全運転補助情報提供装置
【課題】
車両の重心位置情報を利用して、車両の運転手に車両の横転防止に寄与する安全運転補助情報を報知することができる安全運転補助情報提供装置を提供する。
【解決手段】
重心位置測定装置1は、車両の重心位置情報を取得するMPU49(重心位置情報取得手段)と、MPU49により取得した車両の重心位置情報に基づいて、車両の横転防止に寄与する安全運転補助情報を報知するプリンタ39、表示装置42(報知手段)とを有する。
(もっと読む)
剛体特性同定装置及び剛体特性同定方法
【課題】測定点の数を少なくしつつ、高い精度で剛体特性を同定することができる剛体特性同定装置又は剛体特性同定方法を提供する。
【解決手段】計測対象物の質量及び重心位置を含む剛体特性を同定する剛体特性同定装置は、移動不能な静止部10と、静止部に対して移動可能であって計測対象物Tを含む可動部20と、静止部に対して可動部を自由振動可能に支持する支持手段30と、可動部が振動したときに可動部の固有振動数を算出するのに必要なデータを計測する計測手段40と、支持手段による支持条件及び計測手段によって計測された計測データが入力されると共にこれら支持条件と計測データから算出された固有振動数とに基づいて演算処理を行う解析手段50とを具備する。解析手段は支持手段による支持条件と計測データから算出された固有振動数とに基づいて上記計測対象物の剛体特性を同定する。
(もっと読む)
回転体のバランス計測装置
【課題】軸長が短い小型の回転体であっても、高精度にバランス計測が可能なバランス計測装置を提供する。
【解決手段】バランスを計測する回転体1の回転軸11を回転可能に両側で支える軸受部2が、気体を噴出する流体軸受となっており、かつ該流体軸受自体を静電容量センサ20のヘッド構造としている。即ち、流体軸受2は、センサ20の負極となる導電性プローブA21a及びセンサの正極となる導電性プローブB21bと、プローブA,B間を絶縁する第1の絶縁体22と、該軸受部を軸受保持部3に取り付ける取付部材24と、プローブA,Bと該取付部材間を絶縁する第2の絶縁体23とより構成されていて、これらは接着等により一体化されている。これにより、回転軸と軸受部(プローブ)間のギャップgを静電容量として電気的に検出する。
(もっと読む)
慣性乗積計測装置及び慣性乗積計測方法
【課題】慣性乗積を求める慣性乗積計測装置及び慣性乗積計測方法を提供する。
【解決手段】架台12と、架台12を水平角0°方向に沿って揺動させる転動子14と、架台12に対して回動可能に設けられ、被計測体200を載せ置くターンテーブル10aを備えた載置台10を有する慣性乗積計測装置において、ターンテーブル10aを回転させ、水平角0°とは異なる第1水平角αと第2水平角(90°−α)に被計測体200を設定し、被計測体200を第1水平角αの方向に設定した状態で架台12を揺動させて得られる第1揺動周期と、被計測体200を第2水平角(90°−α)の方向に設定した状態で架台12を揺動させて得られる第2揺動周期とを計測し、第1揺動周期及び第2揺動周期から被計測体200の慣性乗積を導出する。
(もっと読む)
バランス修正用加工データの演算装置
【課題】除去対象部の形状に基づいて作成された参照データを使用して、2回目以降の除去加工時にも実加工深さを算出できるようにする。
【解決手段】2回目以降の除去加工における、回転中心から見た第1方位と第2方位の実加工深さを算出するバランス修正用加工データの演算装置20。第1方位と第2方位は、残存するアンバランスの測定方位を間に挟む。これまでになされた各除去加工について、該除去加工で除去されたアンバランス量と該アンバランス量の方位とからなるデータを既除去アンバランスデータとし、これまでになされた各除去加工の既除去アンバランスデータを合成したデータを合成既除去アンバランスデータとする。合成既除去アンバランスデータに基づいて、測定残存アンバランスデータが示すアンバランスを無くすための、第1方位と第2方位の実加工深さを算出する。
(もっと読む)
CMT溶接法による質量構成部品のバランス調整方法
本発明の目的は、高度なバランス品質を備えた回転を行う質量構成部品を提供することであり、このバランス調整は、できる限り自動化され、チップの形成なしに実施されなければならない。このために、質量構成部品への溶接点のビルドアップ溶接による、回転を行う質量構成部品、特にローター(1)のバランス調整方法が提供され、それによって、回転軸に関して質量の対称性が改善される。このビルドアップ溶接はコールド・メタル・トランスファー溶接、特に複数の個別の質量溶接点(4)によって行われる。 (もっと読む)
スピンドルクランプ
本発明は、試験片の回転不釣り合いを決定するための測定装置を有する釣り合い装置に関する。当該装置は、試験片17を保持しこれを試験速度で回転させるように具体化されたスピンドル11を有するスピンドルユニット7、スピンドルユニット7が測定動作の間に生じる不釣り合い力のために所定の測定方向Mに振動することができるように、スピンドルユニット7を機械のベース1に移動可能に係留するスピンドルマウント49、スピンドル11の回転の間に測定方向Mに生じる少なくとも1つの不釣り合い特性値を検出する少なくとも1つのセンサー61、及び所定の箇所から材料を除去することで試験片を釣り合わせる材料除去装置65を有する。測定装置及び材料除去装置は、試験片がスピンドルに保持されている間材料が除去されるように構成されている。スピンドルロック機構64がさらに設けられ、これにより、スピンドルマウント49又はセンサー61なしに、固定の間生成される力によりスピンドルユニット7を固定することができ、材料除去装置65によって生成される力はスピンドルユニットを動かさない。  (もっと読む)
(もっと読む)
重心高さ測定装置
【課題】測定対象物の重心高さを定位置で測定することができる重心高さ測定装置を提供する。
【解決手段】荷重を検出する複数のロードセル11〜14と、ロードセル11〜14によって支持され、重心高さの測定対象物4を載せる載台5と、測定対象物4が載せられた載台5を水平方向に自由振動させる振動発生手段(18,19,21,23,24)と、自由振動状態にある載台5の変位および加速度のいずれか一方または両方を検出する振動状態量検出手段(30,31)と、ロードセル11〜14からの検出信号と振動状態量検出手段(30,31)からの検出信号とに基づいて測定対象物4の重心高さを演算する演算手段(50,51)とを備えるものとする。
(もっと読む)
エンジンバランス測定装置
【課題】アンバランス修正や、エンジンの生産管理基準として有用なアンバランス量を測定することのできるエンジンバランス測定装置を提供する。
【解決手段】測定部10と、測定部10に設置されたエンジン100を所定の回転数で駆動する駆動部20と、を備えており、測定部10は、水平に配置された基台11と、基台11の上面側に配置され、エンジン100を取付けるために水平に配置された架台12と、基台11と架台12との間に設置された少なくとも一つの荷重センサ手段40と、荷重センサ手段40からの入力信号に基づきエンジン100のアンバランス量を算出する制御装置200と、を有し、架台12は、エンジンを架台上に保持するために、架台の上面に互いに離隔して配置して設置された少なくとも3つの支持台70を備えており、荷重センサ手段40は、支持台70の架台12に対する設置位置又は設置位置に近接した位置に対応して配置される。
(もっと読む)
持上計量装置、及び重心位置算出方法
【課題】
本発明は、被測定物が大きい場合でも容易に中心位置を算出できる重心位置算出方法を提供することを目的としている。
【解決手段】
被測定物Mの底部における水平面内の第1軸C1及び第2軸C2をそれぞれ支軸として、第1測定点P1及び第2測定点P2をわずかに持ち上げて荷重W1、W2を測定する。また、第1軸C1から第1測定点P1まで及び第2軸C2から第2測定点P2までの距離L1、L2を計測する。さらに、被測定物の重量Wgも取得する。そして、これらに基づいて、水平面における被測定物Mの水平面重心G’の位置を算出する。
(もっと読む)
ジンバルのマスアンバランス測定装置および方法
【課題】 サーボ動作による雑音成分の影響を受けず、かつ、供試体のジンバルにデザー波形を印加しても、正確で定量的な測定手段を持ったジンバルのマスアンバランス測定装置を提供する。
【解決手段】 ジンバルを備えたシーカを搭載する回転テーブルを備えた測定装置で行われ、前記シーカの機軸に対する前記ジンバルの角度を、デザー振動波形を重畳した状態で一定角方向に向けた状態とし、前記回転テーブルを旋回させることにより得られるジンバル駆動トルク指令値を取得し、これをフーリエ級数解析する。
(もっと読む)
不釣り合い修正方法、および、モータ
【課題】真円度誤差の増大を抑制しつつ回転体の不釣り合いを修正する。
【解決手段】ファンモータのモータ部に用いられる金属製薄肉円筒状の回転体であるロータホルダ32において、重心が偏る不釣り合いを修正するためにレーザ光を照射してロータホルダ32の一部が除去される際に、不釣り合い方向に第1除去領域3231が設定され、第1除去領域3231の周方向両側に第2除去領域3233が設定される。そして、第1除去領域3231における第1除去量m1(g)、および、第2除去領域3233における第2除去量m2(g)が不釣り合い量U(g・mm)に相当する除去量として設定され、これらの除去量が各除去領域から除去されることにより、真円度誤差の増大を抑制しつつ回転体の不釣り合いが修正される。
(もっと読む)
1 - 20 / 41
[ Back to top ]