
Fターム[2G024AD04]の内容
機械部品、その他の構造物又は装置の試験 (9,137) | その他の装置、構造物 (1,049) | 機械的装置、機器 (492) | 回転流体機械 (155) | 送風機、圧縮機 (13)
Fターム[2G024AD04]に分類される特許
1 - 13 / 13
振動特性測定装置および振動特性測定方法
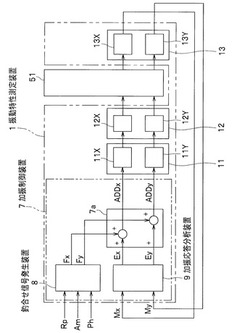
【課題】振動特性の測定時に、許容値を超えることなく回転体を振動させ、エネルギの消費量を増やすことなく高品質のデータを取得可能な振動特性測定装置および振動特性測定方法を提供することを課題とする。
【解決手段】多段遠心圧縮機の回転体を支持する磁気軸受12と、回転体の振幅を測定する変位センサ13と、磁気軸受12に電流を供給する電流増幅器11と、回転体を加振する加振制御信号を出力するとともに、加振制御信号に対する回転体の振動の応答特性を、回転体の振幅に基づいて測定する加振制御装置7を備え、加振制御装置7は応答特性の測定時に、回転体の不釣合い振動を解消する振動解消信号を加振制御信号に加算した回転体制御信号を出力し、電流増幅器11は回転体制御信号に応じた磁力を発生させる電流を磁気軸受12に供給する振動特性測定装置1とする。また、その振動特性測定装置1における振動特性測定方法とする。
(もっと読む)
携帯型振動診断装置

【課題】複数箇所を同時にしかも安全に簡易迅速に測定できる携帯型の振動診断装置を得る。
【解決手段】本発明に係る携帯型振動診断装置1は、複数の振動センサユニット3と、振動センサユニット3から送信される無線信号を受信して機器の診断を行う振動診断部5とを備え、振動センサユニット3は、振動センサユニット3を固定するマグネット7と、振動センサ9と、振動センサ9から出力された信号をデジタル信号に変換するA/D変換手段13と、A/D変換手段13でデジタル信号に変化された信号を無線方式で伝送する無線送信手段15と、振動センサ9及び無線送信手段15の駆動用電源となる電池17とを備えてなるものである。
(もっと読む)
回転体の損傷診断方法及び回転体の損傷診断装置
【課題】回転機械を分解せずにロータのクラックの有無を検出でき、かつ、クラックの位置を特定可能な回転体の損傷診断方法を提供する。
【解決手段】ロータの軸方向の複数箇所にて、ロータを一回転させたときのロータの重力方向の変位量を計測すると共に、計測した変位量のデータから当該変位量のデータの最小値を減じた差分変位量を求め、ロータの回転角に対する差分変位量の関係と、ロータの軸方向の距離に対する差分変位量の最大値の関係を求め、ロータの回転角に対する差分変位量の関係にて差分変位量が最大となるロータの回転角から、ロータの周方向におけるクラック位置を、ロータの軸方向の距離に対する差分変位量の最大値の関係にて差分変位量の最大値が最大となるロータの軸方向の距離から、ロータの軸方向におけるクラック位置を特定する。
(もっと読む)
往復流体機械の作動パラメータを取得、測定、および確認するためのシステム
【課題】往復流体機械のための検証システム(50)を提供すること。
【解決手段】システム(50)は、往復流体機械の少なくとも1つのフレーム(46)が取り外し可能に装着される基部プレートまたは土台(52)と、フレーム(46)の構成要素(12、14、24)を動かすために、基部プレート(52)に回転自在に連結された第1のシャフト(54)と、そのような構成要素(12、14、24)に動作可能に連結して配置され、伝達システム(58)によって、少なくとも1つの第2のシャフト(68)を介して回転する、負荷を発生させるための少なくとも1つのシステム(80)とを備える。負荷を発生させるためのシステム(80)は、往復流体機械のシリンダ(26)上の作動流体によって発生する負荷をシミュレートすることができる。
(もっと読む)
圧縮機を検査するための装置及び方法
【課題】圧縮機を検査するための装置及び方法を提供する。
【解決手段】本圧縮機用の検査装置は、バルブ(12)と該バルブ(12)と連結したダクト(14)とを有する。ダクト(14)と連結したフローノズル(16)は、対応する流量係数を有する。フローノズル(16)と連結した圧力センサ(26)が、作動流体の圧力を測定し、また作動流体の流量が、圧力及び流量係数を使用して計算される。本圧縮機を検査する方法は、第1の出力レベルで圧縮機を作動させるステップと、第1の出力レベルで作動流体の流量を測定するステップと、作動流体の圧力を第1の所定の圧力に等しくなるように調整するステップと、第1の出力レベルで圧縮機の作動パラメータを測定するステップとを含む。本方法はまた、作動流体の圧力を第2の所定の圧力に等しくなるように調整するステップと、作動流体の圧力が第2の所定の圧力である状態で第1の出力レベルで圧縮機の作動パラメータを測定するステップとを含む。
(もっと読む)
機械装置の性能評価方法及び機械装置の性能評価装置
【課題】運転条件範囲の中で性能特性が大きく変化する機械装置に対しても、予測精度の高い近似モデルを作成することで精度良く機械装置の性能を評価することを目的とする。
【解決手段】パラメータ値がとり得る全運転条件範囲から所定数の試験点を決定し、試験点におけるパラメータ値及び試験結果値を入力し、全運転条件範囲を、パラメータ値及び試験結果値によって示される特性が所定の相関関係を有する領域毎に分別し、この領域に含まれる試験点に対するパラメータ値及び試験結果値に基づいて、領域毎に応答曲面モデルを生成し、応答曲面モデルから得られた評価値に基づいて機械装置の性能を評価する。
(もっと読む)
ロータの検査方法及び検査装置
【課題】各ベーン収容溝の異常を自動的に判定するロータの検査方法及び検査装置を提供する。
【解決手段】複数のベーン収容溝3がロータ1の回転軸の中心から放射状に延びるロータ1の検査方法であって、各ベーン収容溝3に摺動可能に嵌合する複数の検査ゲージ11をロータ1の回転軸方向に移動して各ベーン収容溝3に同時に通し、各検査ゲージ11に働く摺動抵抗を個別に測定してロータ1の異常を判定する。
(もっと読む)
無線センサによる振動監視装置
【課題】複数の増幅器を制御することで振動加速度のデジタル信号の伝送時間を増大させること無く、高精度な振動の計測を可能にする無線センサによる振動監視装置を提供する。
【解決手段】振動加速度センサからのアナログ出力信号を増幅する増幅部の増幅倍率を切り替え可能に構成し、この増幅部からのアナログ出力信号をA/D変換して無線により振動監視部に送信し、振動監視部では、受信したデジタル信号の数値を判定し、連続して同じ値を受信した時には増幅器の増幅倍率を切り替えるように構成する。
(もっと読む)
プラズマセンサ及びその関連方法
プラズマセンサ、プラズマセンサシステム及びそれらの関連方法について開示されている。イベントを予測する方法は、2つの電極にキャリア信号を供給する段階と、それら2つの電極間でプラズマを生成する段階とを有する。その方法はまた、プラズマによる変調信号を測定する段階と、特定の値を生成するように変調信号を操作する段階と、その値を閾値と比較する段階とを有する。最後に、その方法は、その比較に基づいて、そのイベントの可能性を決定する段階を有する。 (もっと読む)
ターボエンジンの制御エレメントの機能試験を実行するためのデバイス及び方法
第1のプロセス制御エレメント(5)と、第2のプロセス制御エレメント(8)と、第1のプロセス制御エレメントを試験するための試験システムとを備えたターボエンジンであって、第1のプロセス制御エレメント及び第2のプロセス制御エレメントが同じプロセス変量に影響を及ぼすターボエンジンが開示される。試験システムは、第1のプロセス制御エレメント(5)を試験するために、第2のプロセス制御エレメント(8)によってプロセス変量を修正する。第2のプロセス制御エレメント(8)によるプロセス変量の前記修正は、第1のプロセス制御エレメント(5)を使用して補償される。 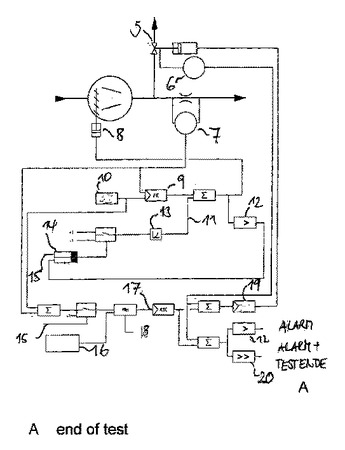 (もっと読む)
(もっと読む)
回転機械用振動監視装置
【課題】小型で高速の回転機械における振動に基づく異常を適切に設定した振動許容値を用いて早期に検知し、異常時の急激な振動増加による回転機械の破損を防止できる回転機械用振動監視装置を提供する。
【解決手段】回転機械用振動監視装置は、回転機械に取り付けたセンサからの振動信号を受信する振動信号受信手段1と、ここで受信した振動信号から振動振幅や振動周波数等を解析する振動解析手段2と、振動解析手段で解析した振動解析値を保存する振動解析値保存手段3と、この振動解析値保存手段3に予め保存した振動解析値を基に振動許容値を算出する許容値演算手段4と、算出した振動許容値を保存する許容値保存手段5と、振動信号受信手段で受信して解析した振動値と振動許容値とを比較する比較判断手段6と、この比較結果に基づいて出力信号を制御装置に出力する信号出力手段7とを備えて構成する。
(もっと読む)
軸受異常診断システム、軸受異常診断装置及び軸受異常診断方法
【課題】 診断を行う場合に回転機の回転数が変動する場合でも、適切な診断しきい値を迅速に設定することができる軸受異常診断システムを提供する。
【解決手段】 軸受異常診断システム20を構成する設備保全コンピュータ17は、加速度ピックアップ15によって測定された軸受13の振動データが与えられると当該振動データの代表値を算出し、軸受13の型式データ及びPLC3より取得した回転速度情報に基づいて、データベース19より対応する診断しきい値を読み出して、前記代表値と診断しきい値とを比較することで軸受13の異常診断を行う。
(もっと読む)
圧縮機検査装置
【課題】圧縮機で発生する振動や音、電流、電圧等の脈動情報を利用して異常の有無と異常原因の特定を可能とし、圧縮機の周辺外部から比較的容易に異常診断の実行を可能とする圧縮機検査装置を提供する。
【解決手段】圧縮機1から発生する振動や音圧、電流、電圧、電気入力の少なくとも一つの状態量を検知する状態量検知手段を備え、圧縮機1の起動開始から所定時間経過するまでの起動部と起動部以降の定常部とに分けて所定の特徴量パラメータに変換し、あらかじめ記憶されている圧縮機1の正常データと比較して圧縮機1の正常/異常の判断を行なう。
(もっと読む)
1 - 13 / 13
[ Back to top ]