
Fターム[2G024CA09]の内容
機械部品、その他の構造物又は装置の試験 (9,137) | 測定項目 (1,868) | 回転速度、角速度 (109)
Fターム[2G024CA09]に分類される特許
1 - 20 / 109
トランスミッション試験装置
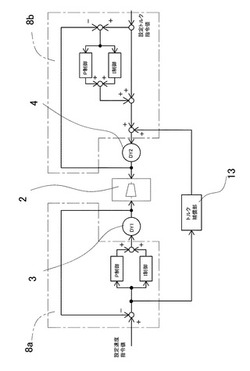
【課題】装置全体で駆動用ダイナモメータの速度が脈動するのを防止できるトランスミッション試験装置を提供する。
【解決手段】駆動用・吸収用ダイナモメータ3,4を有し、駆動用ダイナモメータ3側には速度検出部が、また吸収用ダイナモメータ4側にはトルク検出部が配置されている。これらダイナモメータ3,4の制御部は速度フィードバック指令部8aとトルクフィードバック指令部8bとトルク補償部13とからなっている。速度フィードバック指令部8aは駆動用ダイナモメータ3の速度を、またトルクフィードバック指令部8bは吸収用ダイナモメータ4の負荷を制御している。トルク補償部13は、駆動用ダイナモメータ3に生じる速度偏差から補償トルク指令値を得て吸収用ダイナモメータ4に与えている。
(もっと読む)
ねじの任意負荷荷重試験装置

【課題】 従来、トルク変化に基づいて固有の振動動作を予測して、変数としてねじの回転数、振動振幅偏差、揺動周波数を入力して繰り返し運転し、ねじの異常を強制的に発生させて、原因を追求するという、得られた結果からねじの品質向上を図るための試験装置は存在していなかったという点である。
【解決手段】 電源と、その電源と電気的に接続されるモータドライブと、そのモータドライブで稼動されるねじ駆動用モータと、そのねじ駆動用モータとトルク検出器を介して設けられる対象ねじの設置部と、そのねじの設置部に設けられるタコジェネレータとを有し、前記モータドライブには電源と電気的に接続されたプログラマブルコントローラを接続し、かつ、ねじ駆動用モータにはパルスジェネレータを接続し、前記モータドライブには揺動予想入力波形設定器を接続し、前記プログラマブルコントローラには操作盤とレコーダを接続してあり、前記トルク検出器もそのレコーダに接続してあることとする。
(もっと読む)
回転装置を監視するためのシステムおよび方法
【課題】回転装置の動作を監視する際に使用するためのシステムおよび方法を提供する。
【解決手段】プロセッサは、センサ42、入力装置、および表示装置と通信するように結合されており、所定の期間について、コンポーネントの相対位置に関連付けられる複数の時間ベースの位置値を計算するようにプログラムされている。コンポーネントの相対位置に関連付けられる複数の軌道位置値は、プロセッサによって計算される。プロセッサは、前記入力装置を介するユーザ選択入力に応じて、計算された複数の時間ベースの位置値に対応する複数の時間ベースのトレース、および計算された複数の軌道位置値に対応する複数の軌道トレースのうちの少なくとも1つを図で表す。
(もっと読む)
回転装置の動作の監視時に使用するためのシステムおよび方法
【課題】回転装置の動作の監視時に使用するためのシステムおよび方法を提供する。
【解決手段】予め定義された軸に対する回転装置構成要素102の位置を検知し、構成要素102の位置を示す信号を生成するように構成された少なくとも1つのセンサ134を含む。センサ134に結合されたプロセッサは、位置に少なくとも部分的に基づいて構成要素の複数の特性値を算出し、構成要素特性値の少なくとも一部分に基づいて少なくとも1つの時間ベースの波形を図示するようにプログラムされる。プロセッサはまた、複数の構成要素特性値の少なくとも一部分に基づいて少なくとも1つの軌道プロットを図示し、時間ベースの波形を軌道プロットと同期するようにプログラムされる。時間ベースの波形は、軸に沿った構成要素の位置を示し、軌道プロットは、予め定義された面内の構成要素の位置を示す。
(もっと読む)
回転装置の動作の監視に使用するためのシステムおよび方法
【課題】回転装置の動作の監視に使用するためのシステムおよび方法を提供する。
【解決手段】回転装置100に結合された第1の構成要素102の位置を感知する少なくとも1つの第1のセンサ134と、回転装置100に結合された第2の構成要素102の位置を感知する少なくとも1つの第2のセンサ134とを含む。第1のセンサ134と第2のセンサ134とに結合されたプロセッサが、第1の構成要素位置に基づいて第1の構成要素102の第1の複数の特性値と、第2の構成要素位置に基づいて第2の構成要素102の第2の複数の特性値とを計算する。プロセッサは、第1の複数の構成要素特性値に基づく少なくとも1つのトレースを含む第1の表示を図示し、第2の複数の構成要素特性値に基づく少なくとも1つのトレースを含む第2の表示を図示し、第1の表示内のトレースを第2の表示内のトレースと同期させる。
(もっと読む)
水中航走体の自動動作確認方法及び装置
【課題】水中航走体の動作確認に要する時間、手間、人手を削減する自動動作確認方法および装置を提供する。
【解決手段】アクチュエータ動作確認ステップSaにて、水中航走体の各スラスタと各舵に個別の動作指令を順次与えて、各スラスタと各舵に生じる動作と、対応するスラスタ回転数センサ、舵角センサの検出結果との整合性を確認する。次いで、水面動作確認ステップSbにて、各スラスタや各舵の動作と対応するセンサの検出結果との整合性がすべて確認された水中航走体を水面に浮かべて配置し、各スラスタを順に動作させて、そのときに生じる水中航走体の動作と、水中航走体に搭載してあるINS(慣性航法装置)とDVL(ドップラー式対水速度計)とGPS装置による検出結果との整合性を確認することで、各スラスタと対応するスラスタ回転数センサの同時接続間違いがなく、更に、水中航走体に搭載されたINSとDVLの向きが正しいことを確認させる。
(もっと読む)
検知装置、画像形成装置、プログラムおよび検知システム
【課題】連結されたギアから破損したギアを容易に特定可能とする。
【解決手段】連結されたギアのうち1のギアについて回転速度の周波数特性を算出し、噛合周波数でのピークが閾値以上である場合に、連結されたギアが破損したギアを含むものと判定する。そして、連結されたギアが破損したギアを含むと判定された場合に、連結されたギアのうち何れか1のギアにおける回転速度の変化の周期を検出し、連結されたギアのうち、回転周期が検出された周期と対応するギアが破損したギアであると特定する。
(もっと読む)
機械角度測定装置
【課題】連続的な角度変化を測定できる機械角度測定装置を得ること。
【解決手段】機械角度測定装置は、機械要素5を回転させるモータ4の検出角度をフィードバックして、検出角度が指令角度に追従するようにモータを駆動することで、機械要素の機械角度を制御する装置において機械角度を測定する機械角度測定装置であって、回転する機械要素の位置、加速度および角速度の少なくとも1つを測定するセンサ1と、検出角度とセンサによる測定結果とから機械角度を計算する機械角度計算部10と、を備える。
(もっと読む)
電気機械装置の特性測定装置及び測定方法
【課題】電気機械装置のトルクやその他の特性を簡便に測定する。
【解決手段】電動モーターの特性測定装置であって、予め特性が既知である負荷モーターと、前記負荷モーターと被測定モーターのローターとを接続するカップリングと、前記被測定モーターに負荷トルクを与えるために、前記負荷モーターの動作を制御する負荷モーター制御部と、前記負荷モーターの回転数と、前記負荷モーターに流れる電流とから、前記負荷モーターが前記被測定モーターに与える負荷トルクを算出する負荷トルク算出部と、前記負荷トルクが前記負荷モーターに与えられたときの前記被測定モーターの電流と回転数とを測定する測定部と、前記負荷トルクと被測定モーターの電流と回転数とを用いて前記被測定モーターのトルク−回転数特性と、トルク−電流特性と、を取得する特性取得部と、を備える。
(もっと読む)
装置および稼働時間制御方法
【課題】
装置や部品自体の稼働時間を調整し、期待される稼働時間を満たすように制御することを目的とする。
【解決手段】
装置を構成する部品の環境条件と累積稼働時間を基に装置を構成する部品の残り稼働時間の予測を行い、装置を構成する部品ごとの予測稼働時間が装置の期待稼働時間よりも短い場合には装置を構成する部品の環境条件(稼働環境)を制御することで、装置を期待する稼働時間動作させることを可能にする装置。
(もっと読む)
電気機械の軸受の熱異常の診断
【課題】軸受メタル温度(BMT)を評価して、電気機械のロータミスアライメントおよび/または軸受ワイプを診断するシステムおよび方法を提供する。
【解決手段】タービン(12)に近接して位置する第1のBMTセンサ、および発電機(10)に近接して位置する第2のBMTセンサから軸受メタル温度(BMT)示度を得ると共に、潤滑油入口温度、速度およびパワーを含む動作データを得るための入力システムと、不良の入力データを除去するフィルタシステムと、BMTセンサの一方が温度の増加を報告し、他方のBMTセンサが温度の減少を報告していることに応答してミスアライメントの警告を発するミスアライメント解析システムとを含む第1のシステム。
(もっと読む)
負荷装置
【課題】発生音が小さく、回転負荷が任意に設定できる負荷装置を提供する。
【解決手段】回転機械2に接続される回転体3と、回転体3を収容するハウジング4と、ハウジング4内に満たされた流体5と、流体5と回転体3との摩擦力を変化させることによって回転機械2に加わる回転負荷を変化させる摩擦力可変手段とを備え、回転体3は、同軸で一体回転する複数の回転円板52を有すると共に、摩擦力可変手段は、回転円板52間の距離を変化させることにより回転負荷を変化させる距離可変手段を有する。
(もっと読む)
角速度センサ検査用テーブル装置
【課題】短サイクルタイムで角速度センサの温度特性を検査できるようにする。
【解決手段】角速度センサ検査用テーブル装置において、角速度を得る為のモータ10の出力軸に回転プレート20を配置し、この回転プレート10上に角速度センサ2を配置し、更に回転プレート20上に温度調整ユニット30を配置する。温度調整ユニット30は、角速度センサ2と直接又は間接的に接触して温度制御する。回転プレート20及び温度調整ユニット30を角速度センサ2と共に連続回転させながら、角速度センサ2の信号特性を検査する。
(もっと読む)
軸受の診断装置
【課題】回転設備の軸受部の異常の検出において、異常の程度が小さな状態でも軸受の回転速度に予期せぬ変化が生じる場合に、軸受の異常を精度よく検出できる軸受の診断装置を得る。
【解決手段】軸受の診断装置は、振動信号を回転速度情報に対応する周期のサンプリングクロックでサンプリングしてデジタルの振動信号に変換し、デジタルの振動信号をウェーブレット変換して複数の周波数帯域の時間軸波形を抽出し、抽出された時間軸波形のうちから異常の特徴を含む周波数帯域の時間軸波形を抽出し、抽出された異常の特徴を含む周波数帯域の時間軸波形に対してFFT解析を実施して得られた周波数スペクトルから軸受の構造と回転数に起因する周波数の振幅値を算出し、軸受の構造と回転数に起因する周波数毎の判定基準値と算出した周波数の振幅値とを比較する。
(もっと読む)
異常診断装置、回転装置及び異常診断方法
【課題】回転速度センサの出力信号に重畳するノイズの影響を排除して、正確に回転速度を検出し、回転装置の異常を高い精度で診断する。
【解決手段】検出した振動及び回転速度に基づいて、回転装置の異常を診断する異常診断装置であって、回転速度センサ15からの回転信号をA/D変換し、変換したディジタル信号についてフーリエ変換による周波数分析を行うことで回転速度を算出する回転分析部26を有することを特徴とする異常診断装置。
(もっと読む)
パワープラント機械の過速度保護システムを試験する方法及びシステム
【課題】トリップの機会を低減させる過速度保護システムを試験する方法を提供すること。
【解決手段】本発明の実施形態は、シャフト(137)を備え、安全制御システム(190)と一体化されたパワープラント機械の過速度保護システムを自動的に試験するという技術的な効果を有する。本発明の一実施形態では、パワープラント機械がシャットダウン中である間に過速度保護システムを自動的に試験することができる。本発明の別の実施形態では、無負荷定格速度で動作しながらシャフト(137)の速度を調整することによって、パワープラント機械の過速度保護システムを自動的に試験することができる。
(もっと読む)
パワープラント機械の過速度保護システムの試験を行うときを決定する方法
【課題】パワープラント機械の過速度保護システムの試験を行うときを決定する方法を提供すること。
【解決手段】本発明の実施形態は、パワープラント機械(105、145)の過速度保護システムを試験するときを決定することに関する技術的効果を有する。本明細書で説明されるように、本発明の実施形態は、各々がシャフト(137)を含む多種多様なパワープラント機械に適用することができる。過速度保護システムの試験が行われるべきことを決定した後、本発明の実施形態により、様々な方法で過速度保護システムを試験することができるようになる。
(もっと読む)
パワープラント機械の過速度保護システムを試験する方法およびシステム
【課題】トリップの機会を低減させる過速度保護システムを試験する方法を提供すること。
【解決手段】本発明の実施形態は、少なくとも1つのシャフト(137)を備えるパワープラント機械(105、145)の過速度保護システムを自動的に試験する(200)という技術的な効果を有する。本発明の一実施形態では、パワープラント機械(105、145)が無負荷定格速度(FSNL)から減速している間に過速度保護システムを自動的に試験することができる。本発明の別の実施形態では、パワープラント機械がFSNLへ加速している間にパワープラント機械(105、145)の過速度保護システムを自動的に試験することができる。
(もっと読む)
回転機械の回転数推定方法、装置及びプログラム
【課題】回転数が変化する回転機械の回転数を当該回転機械の振動信号を利用して推定できるようにする。
【解決手段】周波数分析部2では、回転機械に設置された振動加速度センサ108の信号を周波数分析してFFT波形を得る。回転数推定部3では、回転機械の回転周波数の実数倍Nのピークスペクトルが観測される周波数バンドBを予め設定しておき、周波数分析部2での周波数分析の結果から、周波数バンドB内のピークスペクトル周波数Sを抽出する。そして、その抽出したピークスペクトル周波数Sを実数倍Nで除して回転周波数frを算出し、当該回転機械の推定回転数を算出する。
(もっと読む)
動力系の試験装置及びその制御方法
【課題】応答遅れを抑制し、吸収側の動力部であるダイナモメータの速度を高精度に制御することができる、動力系の試験装置及びその制御方法を提供すること。
【解決手段】目標速度値V1が微分されて加速度値A2が得られ、加速度値A2に基づき目標トルク値T1が算出される。この目標トルク値T1が、吸収側トルク計6で検出された実トルク値T4に近づくようにPIアンプ52により制御される。目標速度値V1は予め設定された既知の情報であるので、目標速度値V1が微分された値である加速度値A2もほとんど遅延なく得ることができる値となる。したがって、フィードバック制御の応答遅れを抑制することができ、高精度にダイナモメータ2の速度を制御することができる。
(もっと読む)
1 - 20 / 109
[ Back to top ]