
Fターム[2G052CA20]の内容
サンプリング、試料調製 (40,385) | 移送 (4,521) | 移送技術 (2,603) | ノズル、ピペットによるもの (1,022) | ポンプによるもの (212) | ピストン(プランジャ)によるもの (150)
Fターム[2G052CA20]に分類される特許
141 - 150 / 150
試料の分析方法、および分析器具
【課題】
本発明の目的は、プロテインチップ等の固体基板にスポットされた抗原と、抗体と反応させる場合において、スポット中心部と周辺部における反応を均一化することに関する。
【解決手段】
本発明は、基板にスポットされた第一溶液を、これより大きな反応用孔にて覆い、反応用穴孔に第二溶液を供給し、第一溶液と第二溶液を反応させることに関する。これにより、第一溶液と第二溶液の反応を、スポット中心部と周辺部において略均一にでき、手軽かつ高精度に基板上で分析できる。
(もっと読む)
分取分注装置

【課題】 殺菌又は滅菌処理し、感染を確実に防止できる分取分注装置ならびにチップ及びシャーレ位置を決定することのできる分取分注装置を提供する。
【解決手段】 分取分注作業領域とチップ及びシャーレ駆動機構等を収納した領域との間にシール機構を備えることにより、分取分注作業領域とチップ及びシャーレ駆動機構等を収納した領域を隔離する。これにより、殺菌・滅菌処理に用いる高温高圧スチームや各種ガス等がチップ及びシャーレ駆動機構等を収納した領域に流入することを確実に防止し、各駆動機構部等の劣化を防止することができる。また、回転軸の底部に位置決めセンサを備えることにより、チップ及びシャーレの位置を決定することができ、シャーレ底面の任意の位置で分取分注作業を行うことができる。
(もっと読む)
分注装置
【課題】複数のノズル装着部が装置本体に対しそれぞれ独立して移動する分注装置に、共通する1つの基準点を設ける(登録する)ことにより、例えば、容器(例えば試験管)を保持するラック(例えば試験管ラック)の位置等を登録する作業に要する手間を軽減することができ、その作業を迅速に行なうことができる分注装置を提供する。
【解決手段】分注装置1は、自動基準点登録機能を内蔵する独立2ノズル分注装置であり、第1のx軸方向移動機構、第1のy軸方向移動機構および第1のz軸方向移動機構(第1の移動機構)と、第2のx軸方向移動機構、第2のy軸方向移動機構および第2のz軸方向移動機構(第2の移動機構)とにおける、各々の動作に対する共通する1つの基準点を有する。
(もっと読む)
自動固相抽出装置
【課題】フィルタ付き容器から液体が真空吸引された状態を目視で確実に観察できる自動固相抽出装置を提供すること。
【解決手段】液体の吸引及び吐出動作が可能な分注ヘッドと、該分注ヘッドを移動させるための移送手段と、前記分注ヘッドの吸引及び吐出動作と前記移送手段による分注ヘッドの移動を制御するための制御手段を備え、該制御手段から入力された運転工程に従って動作する自動固相抽出装置において、予め任意の運転工程で装置の動作を一時停止させる一時停止設定機能を前記制御手段に設ける。より具体的には、内部を真空状態にしてフィルタ付き容器から液体を真空吸引する真空吸引手段を備え、予め設定された運転工程において装置が一時停止状態にあるとき、前記真空吸引手段を単独で運転させて前記フィルタ付き容器からの液体の真空吸引状態を目視にて確認する。
(もっと読む)
手持ち式ピペット
本発明による手持ち式ピペットは、互いに離間された第1および第2係止部を有したハウジング内に収容されたアクチュエータアセンブリによって駆動されるピストンを備えている。アクチュエータアセンブリは、第1接触面を備えた第1セクションと、第2接触面を備えた第2セクションと、に分割される。アクチュエータアセンブリは、第1接触面が第1係止部に対して接触しておりかつ第2接触面が制御距離の分だけ第2係止部から離間している休止位置と、第2接触面が第2係止部に対して接触しておりかつ第1接触面が第1係止部から離間しておりさらにアクチュエータアセンブリのストロークおよびピストンのストロークが制御距離に等しいような前進位置と、の間にわたって往復移動し得るよう構成されている。 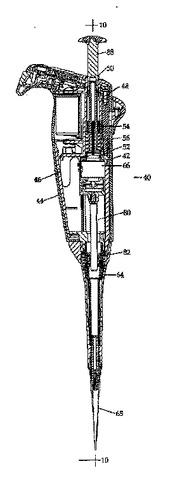 (もっと読む)
(もっと読む)
ピペット先端部装着及び排出機構及び関連するピペット先端部
エアディスプレースメントピペット(10)は錠止チャンバを包囲する上部部分を具備する管状ピペット先端部(26)、及び上部部分から到達し、かつ減じられた直径端部まで下向きにテーパが付された本体部分を具備する。ピペット上の管状装着軸は、ピペット先端部(26)の錠止チャンバ内に軸線方向挿入するように形状構成され且つ寸法づけられた遠位端を具備する。装着シャフトの遠位端上の協働表面とピペット先端部の上部セクションは、装着シャフトの遠位端の錠止チャンバ内に挿入することに応じて、ピペット先端部と装着シャフトとの間に軸線方向に相互係合する関係を確立する。スリーブ(44)は軸線方向に相互係合関係を確立する後退位置と、軸線方向に相互係合関係を破壊して、これにより、ピペット先端部(26)シャフトの軸線方向排出部を収容する前進位置と、の間で軸線方向に移動可能である。 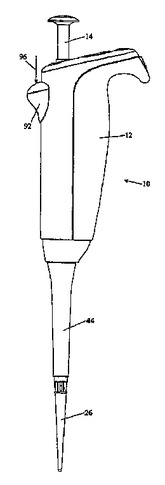 (もっと読む)
(もっと読む)
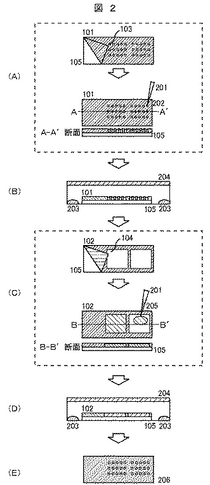
サンプル調製用装置
【課題】
本発明は、後の分析装置、例えばガスクロマトグラフの中への導入を目的とした、液体、固体又はガス状サンプルからの揮発性成分の抽出及び濃縮のために特に好適な方法に関する。
【解決手段】
サンプルは、対象分析物の抽出のため、抽出剤のパッキンを通してフラッシングされる。好適な装置は、中空ニードルを有するシリンジを備える。チャンバーがニードルとシリンジとの間に設けられ、その中に抽出剤が配置される。
(もっと読む)
液体サンプリング用ピペットにおける正確な液量測定用のシステムと方法
【課題】ピペットの現在の物理的状態又は要求された容積に応じて、ピペットで液体を吸引/放出するために、液体の要求された容積を調整する方法と装置を提供すること。
【解決手段】本発明のピペットは、ピストン組立体に接触すし、チップホルダ内でピストン組立体のピストンロッドを移動させるピストン駆動機構を有し、これによりチップホルダ内の液体の調整を行う。本発明の方法は、(A)ピペットで、要求された容積を選択するステップ(要求された容積は調整される液体の量を表し)と、(B)容積特性を用いて、修正容積を計算するステップ(容積特性は、要求された容積の関数としてチップホルダ内で調整される液体量の差を表し)と、(C)ピペットのユーザに修正容積を表示するステップとを有する。これによりチップホルダ内の液体の要求された容積を調整する。前記容積特性は校正プロセスを用いて決定される。 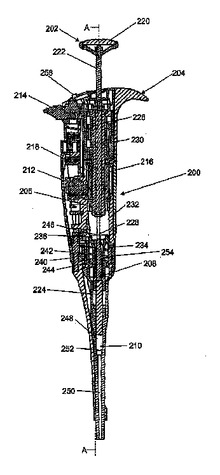 (もっと読む)
(もっと読む)
吸引と放出を調整するための表示とセレクタを備えた電子ピペット
【課題】ピペット内の液体を吸引し放出することを制御するシステムを提供すること。
【解決手段】本発明のシステムはコンピュータ装置とピペットを有する。コンピュータ装置は、ピペッティングモジュールと第1通信インターフェースとを有する。ピペッティングモジュールは、ピペット内で行われる操作を規定する。第1通信インターフェースは、電気信号をピペットに送信し、この電気信号がピペット内で行われる操作を規定する。前記ピペットは、サンプリングチューブと、ピストン組立体と、ピストン駆動機構と、第2通信インターフェースと、マイクロプロセッサとを有する。ピストン組立体は、前記サンプリングチューブに搭載され、前記サンプリングチューブ内に適合するピストンロッドを有する。ピストン駆動機構は、前記サンプリングチューブ内でピストン組立体のピストンロッドを動かし、これによりサンプリングチューブ内の液体を制御する。第2通信インターフェースは、コンピュータ装置から電気信号を受信する。マイクロプロセッサは、ピストン駆動機構を制御し、前記受信した電気信号に規定される操作を実行する。 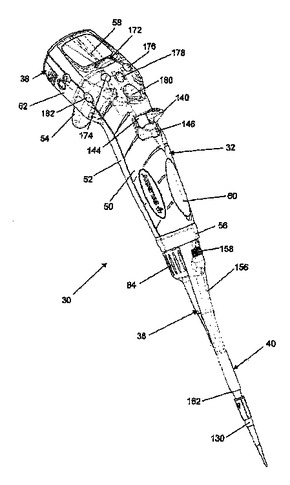 (もっと読む)
(もっと読む)
電動ピペット
本発明は、電動ピペットに関し、この電動ピペット1は、本体2、先端部4、フック部5、プッシュボタン部6、及び表示部7から構成される。本体2は、垂直軸3を有し、フック部5、プッシュボタン部6、及び表示部7からなる群から選択された少なくとも1つの部分が、電動ピペット1の垂直軸3の回りにそれぞれに対応する角度ψ1、ψ2、ψ3で回転可能である。 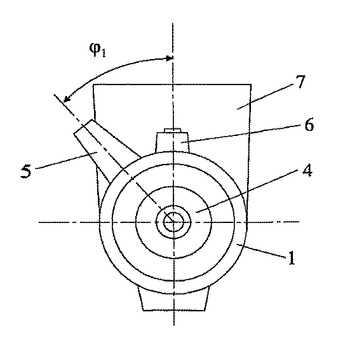 (もっと読む)
(もっと読む)
141 - 150 / 150
[ Back to top ]