
Fターム[2G053DB03]の内容
磁気的手段による材料の調査、分析 (13,064) | 磁気センサ(探傷子)ヘッドの構造、駆動 (1,414) | ヘッドの形状、構造 (725) | 複数の磁気センサ(探傷子)を持つもの (396) | 平面状に配列したもの (165)
Fターム[2G053DB03]に分類される特許
1 - 20 / 165
磁性金属異物の検出装置
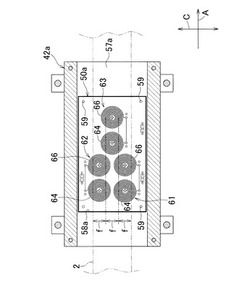
【課題】微小な磁性金属異物の検出装置。
【解決手段】微小な磁性金属異物を検出するための検出装置では、差動型検出コイル61,62,63が被検査物2が走行する一方向Aに配置される。その差動型検出コイルは、渦巻き状の右巻きコイル64と渦巻き状の左巻きコイル66とを直列に接続することによって形成されるとともに、それら右巻きコイルと左巻きコイルとが共通の電気絶縁性基板の表面上に形成される。
(もっと読む)
渦電流センサ及び検出物判別回路

【課題】周波数特性が平坦であり、かつ小型で簡単な構造の信号処理回路で安価で再現性のよい渦電流センサを提供すること。
【解決手段】交流磁界の印加により導電体である検出物に渦電流を発生させる交流磁界発生用コイルと、前記渦電流による磁界を検出する一定方向に感度を持った磁気センサとを有し、磁気センサの感磁方向と同一方向に磁界が通過するように前記交流磁界発生用コイルと磁気センサを配置し、前記交流磁界発生用コイルと磁気センサとの間の磁束線を横切るように検出物が通過するようにして、前記交流磁界発生用コイルからの磁界が検出物の渦電流に変化することによる磁界の損失分を検出するようにしたことを特徴とする。
(もっと読む)
回転デバイス用センサ組立体および製作方法
【課題】高温環境および/または低温環境で動作するデバイスの構成要素を監視する近接センサおよび製作方法を提供する。
【解決手段】センサ組立体40は、ハウジング内の空洞を画定する内面を含んでいるハウジングと、空洞の中に配置された近接センサ42とを含む。近接センサ42は、第1のコネクタ、第2のコネクタ、および第1のコネクタと第2のコネクタの間に延在する実質的に平面状の検知コイルを含む。検知コイルは、第2のコネクタが第1のコネクタから半径方向の外側になるように、第1のコネクタから外側に延在する。
(もっと読む)
バイオセンサー
【課題】非侵襲で且つ連続的にバイオマーカーを測定するバイオセンサーを実現できるようにする。
【解決手段】バイオセンサーは、バイオマーカーの濃度に応じて体積が変化する第1のゲル膜111及び、第1のゲル膜111と比べてバイオマーカーの濃度に対する体積の変化が小さい第2のゲル膜112を有する反応部101と、素子搭載面の上に反応部101を搭載し、第1のゲル膜111の体積の指標と、第2のゲル膜112の体積の指標との差を検出する検出部102とを備えている。第1のゲル膜111と第2のゲル膜112とは、互いに並行に配置され且つ接続部113において互いに接続されている。検出部102は、接続部113から第1のゲル膜111における第1の部位115までの第1の長さと、接続部113から第2のゲル膜112における第2の部位までの第2の長さとの差を検出する。
(もっと読む)
磁気特性測定方法および磁気特性測定装置
【課題】リフトオフ量の変動が発生した場合であっても、鋼板の局所的な磁気特性分布を安定して測定すること。
【解決手段】磁気特性測定方法は、事前測定用被検体の健全部における感磁性素子の出力と感磁性素子のリフトオフ量との関係LS(l)を健全部リフトオフデータとしてあらかじめ取得するステップと、事前測定用被検体の欠陥部における感磁性素子の出力と感磁性素子のリフトオフ量との関係LP(l)を欠陥部リフトオフデータとしてあらかじめ取得するステップと、被検体における感磁性素子の出力xと出力xが得られたときの感磁性素子のリフトオフlとを測定する測定ステップと、健全部リフトオフデータ、欠陥部リフトオフデータ、および測定ステップにおいて測定されたリフトオフ量を用いて、測定ステップにおいて測定された被検体における感磁性素子の出力xを補正演算する補正ステップと、を含む。
(もっと読む)
渦流探傷装置
【課題】電気的走査に際して生じる時間ロスを低減し、高速且つ正確に鋼材など導電性被検査材の表面皮下に存在する欠陥を検査することが可能な渦流探傷装置を提供する。
【解決手段】渦流探傷装置1aに、被検査材に励起磁場を印加することで渦電流を発生させる複数の送信コイル2Aと、発生した渦電流が作る磁場を検出する複数の受信コイル3と、受信コイル3からの検出信号に基づいて被検査体の欠陥を検出する探傷信号処理装置9と、を設ける。複数の受信コイル3を、互いに隣り合うように配置する。その上で、送信コイル2Aによって、受信コイル3を1つずつ取り巻くとともに、隣接する送信コイル2A同士で互いに逆方向を向く励起磁場を形成する。
(もっと読む)
構造物探傷方法及び装置
【課題】3次元形状溶接部等の複雑な形状の対象物であっても、高精度の探傷検査が可能な渦電流探傷方法及び装置を実現する。
【解決手段】探傷の事前にティーチングを実施する。ティーチングは探傷領域内の複数点で溶接線に対するECTセンサ114の傾きを調整し密着性が良好なECTセンサ114の押し付け条件を選定する。ティーチングを実施した各点のECTセンサ114の傾き等をマニピュレータ制御装置106に記録し、記録したティーチングデータを読み込んでECTセンサ114をスタート位置に移動させる。その際、探傷スタート位置におけるECTセンサ114の密着性を確認し、確認後、事前走査と同じ条件でマニピュレータ113を操作しながら探傷を実施してデータを取得し、取得したデータから密着性を判断し、密着性が低い場合は、条件を再調整して探傷を行う。
(もっと読む)
構造材表面のひずみ検出センサ、それを用いたひずみ検出システムおよびひずみ検出方法
【課題】
一定以上の表面粗さを有する構造材表面の粗さの凹凸に追従して、微細な凹部の表面にも磁気センサを十分に近づけることのできるひずみ検出センサを提供する。
【解決手段】
構造材表面のひずみを材料の応力誘起マルテンサイト変態した部分が強磁性体となることを利用して磁気的に検出するひずみ検出センサ10であって、磁気信号を検出するためのセンサ部2および該センサ部と電気的回路を形成するための電極部3を備えており、前記センサ部2と前記電極部3を支持するセンサ本体部1の被測定面に対向する表面内において、前記センサ部2周辺がセンサ本体部1の他の部分よりも突出するように形成されたセンサ周辺突出部4を有し、該センサ周辺突出部4に前記センサ部2が形成されている。
(もっと読む)
渦流計測用センサ及び渦流計測方法
【課題】外径が大きく変化したり、凹部を有したりするような高周波焼入れ部品を検査する場合であっても高い検出精度で焼入れ深さ測定試験を行うことができ、また、焼入れ深さの計測にあたってリフトオフの影響を排除することで計測精度を向上させることが可能となる、渦流計測用センサ及び渦流計測方法を提供する。
【解決手段】渦流計測用センサは、励磁コイル51が計測部位であるフィレット部Fと交差しない方向に向けた軸心を中心として巻回されており、励磁部51aは、励磁コイル51の一部において、励磁部51aの水平方向面がアームAに対向し、下側面がジャーナル部Jに対向するように、励磁コイル51をフィレット部Fに対向して配置した際に、励磁部51aの外形形状がフィレット部Fの形状と略同一となるように形成されている。
(もっと読む)
表層欠陥検出装置
【課題】金属被検体の地合ノイズとヘゲ欠陥に起因する検出信号とを精度良く弁別する。
【解決手段】金属被検体の表層部に渦電流を発生させる励磁コイルAと、渦電流により誘起された磁束を検出する検出コイルB,B’とを有する複数のE型センサ5と、複数の渦流探傷センサの検出信号の波形の相互相関値を算出する相互相関値算出手段16と、相互相関値を用いて前記金属被検体の表層の欠陥を判別する判別手段17とを備える。
(もっと読む)
伝熱管の検査装置および検査方法
【課題】伝熱管のシール溶接部を遠隔操作によって検査すること。
【解決手段】伝熱管5が開口する管板4の管板面に固定される検査ロボットに設けられ、伝熱管5が管板4に溶接されたシール溶接部Wの検査を行う伝熱管5の検査装置20であって、伝熱管5に対して挿抜される挿入部223と、シール溶接部Wにおける欠陥の有無を検出する検出手段を有した検出部224と、挿入部223の中心軸C2の回りに検出部224を回転させる回転機構225と、検査ロボットに対し、挿入部223、検出部224および回転機構225を、検出部224の回転の中心軸C2に沿って移動させる移動機構226と、を備える。
(もっと読む)
周期性欠陥検出方法および周期性欠陥検出装置
【課題】発生周期が未知であっても用いることができ、かつ、同期加算に要する領域が少なくてもよい周期性欠陥検出装置を提供する。
【解決手段】鋼板2に磁界をかける磁化器4,4’と、鋼板2の表面に漏洩する漏洩磁束を検出して表面測定データを取得する表面の磁気センサ5と、被検体の裏面に漏洩する漏洩磁束を検出して裏面測定データを取得する裏面の磁気センサ5’と、表面測定データおよび裏面測定データに基づいて周期性欠陥の発生周期を判定する周期性判定装置8と、鋼板2の表面および裏面の同一位置についての表面測定データと裏面測定データを組み合わせて同期加算するデータ列加算部91と、同期加算した測定データを用いて被検体に周期性欠陥があるか否かを判定する欠陥判定部92を備える。
(もっと読む)
表層欠陥検出装置
【課題】金属被検体の地合ノイズによるSN比の低下を防ぎ、ヘゲ欠陥を精度良く検出する。
【解決手段】金属被検体4の表層部に渦電流を発生する励磁コイルAと、渦電流により誘起された磁束を検出する第1及び第2の検出コイルB,B’とを有する複数のE型センサ5を金属被検体4の搬送方向に直交する方向に配列した表層欠陥検出装置1において、各E型センサ5について、第1の検出コイルBの検出信号と第2の検出コイルB’の検出信号との差分を差動増幅して差動増幅信号として出力する差動増幅器8と、複数のE型センサ5間における差動増幅信号の差分を検出信号として出力する幅差分処理回路11と、検出信号に基づいて、ヘゲ欠陥が存在するか否かを判別する判別手段17とを備える。
(もっと読む)
渦電流探傷方法
【課題】フレキシブルなプローブを用いて、曲面の検査をする場合でも、リフトオフ量を精度良く評価できる渦電流探傷方法を提供することにある。
【解決手段】励磁コイル1Aと検出コイル1Bの並び方向が検査面の曲面方向と同じ渦電流探傷プローブを用いる。ステップS60において、検査面に渦電流プローブを設置する前から、設置するまで信号において、X又はY成分のいずれかの最大値信号値V0と設置時点の信号値V1の大小関係を比較する。そして、ステップS70,S80にて、渦電流プローブを検査面に密着させる際に発生する検出のX成分又はY成分の信号値とリフトオフの特性と最大値信号値V0と設置時点の信号値V1のいずれかを用いて、リフトオフ特性からリフトオフ値を求める。
(もっと読む)
表層欠陥検出装置
【課題】金属被検体の地合ノイズとヘゲ欠陥に起因する検出信号とを精度良く弁別する。
【解決手段】金属被検体4の搬送方向に直交する方向に配列された、複数のE型センサ5を備え、金属被検体4の搬送方向とE型センサ5の配列方向とを含む2次元平面に各渦流探傷センサの検出信号をマッピングすることによって、検出信号の2次元マップを作成する2次元画像化手段18と、2次元マップにおける検出信号の2次元パターンに基づいて、金属被検体4の表層にヘゲ欠陥が存在するか否かを判別する判別手段17とを備える。
(もっと読む)
磁場分布取得装置
【課題】対象物との間において、異なる2つの距離における磁場分布の測定を高速に、かつ、精度よく行い、3次元磁場分布を高精度に取得する。
【解決手段】磁場分布取得装置は、磁場を測定するセンサ部2を有し、センサ部2では、第1センサ群21が対象物に対向する第1平面81上に離散的に配列されるとともに、第1平面81から対象物側に微小距離dだけ離れ、かつ、第1平面81に対して平行に固定された第2平面82上に、第1センサ群21と同様の構成の第2センサ群22が、第1平面81の法線方向において第1センサ群21と重なることなく離散的に配列される。これにより、磁場分布取得装置では、対象物との間において、異なる2つの距離における磁場分布の測定を高速に精度よく行うことができる。演算部では、第1センサ群21の第1測定値群、および、第2センサ群22の第2測定値群に基づいて、対象物に起因する3次元磁場が高精度に求められる。
(もっと読む)
鋼床版検査装置
【課題】鋼床版の欠陥検査を行う際に迅速に欠陥場所を非破壊検出することが可能な鋼床版検査装置を提供する。
【解決手段】一方の開口を鋼床版Pに対向して配置される円環状の励磁コイル、及び励磁コイルの環内に励磁コイルと同軸に配設された検出コイルを備えたプローブ10を複数個備えており、被検体である鋼床版Pの上面を走行自在な台車2と、台車2に搭載され、台車2の走行方向と垂直な方向に往復動するアクチュエータ9とを備え、各プローブ10は、アクチュエータ9上に搭載され、アクチュエータ9の往復動方向に縦列して設ける。
(もっと読む)
電池の検査装置
【課題】 外部磁界の影響をなくして磁界を検出する。
【解決手段】 通電信号供給手段31及び通電回路32は、電解質と電極から構成されている電池FCに所定周波数の交流成分を重畳させた直流電圧を印加して電解質に通電する。複数の磁気センサ22をマトリクス状に配置した磁気センサユニット20は、複数の磁気センサ22が電池FCの正負電極Fe1,Fe2間方向に平行な面に対向するように配置される。複数の磁気センサ22は、電解質中を流れる電流によって発生する磁界を検出して、検出磁界を表す信号をそれぞれ出力する。これらの検出信号は、センサ信号取出回路33−1〜N及び信号選択回路34を介してロックインアンプ35に供給される。ロックインアンプ35は、通電信号供給回路31からの所定周波数に等しい信号を用いて、検出信号から所定周波数の信号成分を取出して出力する。
(もっと読む)
渦電流探傷装置、方法、及びプログラム
【課題】被検査体上において把握されるコイルの運行情報に基づいてコイルの検知信号の感度補正を実行し、探傷精度に優れる渦電流探傷技術を提供する。
【解決手段】渦電流探傷装置1は、被検査体Uの表面にコイル23を運行させる運行制御部10と、このコイル23に励磁信号Jを送信して被検査体Uに渦電流を生じさせる送信部22と、この渦電流に誘導される磁場を検知したコイル23が出力する検知信号Dを受信する受信部24と、被検査体Uの表面を運行しているコイル23の運行情報Kを取得する情報取得部12と、この運行情報Kに関連付けした補正情報Hを保持する補正部25と、この補正情報H、励磁信号J及び検知信号Dに基づき被検査体Uの探傷信号Nを演算する演算処理部26と、から構成される。
(もっと読む)
渦電流探傷方法
【課題】被検査面の曲率半径が不明な場合でも、被検査面にプローブを押付けた際の密着性を確認できる渦電流探傷方法を提供することにある。
【解決手段】演算制御部40は、試験体20Aの平面に渦電流プローブ3を密着させるまでに発生する検出信号と試験体20Bの曲面に渦電流プローブ3を密着させる際に発生する検出信号からリサージュ平面上にリフトオフ許容領域Aを求める。さらに、演算制御部40は、渦電流プローブを被検査体に密着させる過程で発生するリサージュ平面上の信号とリフトオフ許容領域Aを比較して、任意曲面に渦電流プローブを押付けた際のリフトオフ量を評価する。
(もっと読む)
1 - 20 / 165
[ Back to top ]