
Fターム[2G058GB03]の内容
自動分析、そのための試料等の取扱い (28,698) | 分析値以外の測定、検知 (836) | 液量、液位の検知 (428) | 試料の気−液、液−液界面の検知 (180)
Fターム[2G058GB03]の下位に属するFターム
電気的検知 (77)
Fターム[2G058GB03]に分類される特許
1 - 20 / 103
気泡検出装置
【課題】チューブ体に収容された液体が散乱体を含有する液体であっても、確実に気泡を検出でき得る気泡検出装置を提供する。
【解決手段】透光性材料からなるノズルチップ100に収容された液体中の気泡を検出する気泡検出装置は、水の吸光ピーク波長と同じ波長の光をノズルチップ100に向かって照射する発光部20と、ノズルチップ100を挟んで前記発光部20と反対側に設置され、前記ノズルチップ100を通過した光の光量を検出する受光部22と、前記ノズルチップ100を軸方向に相対移動させるZ駆動部14と、Z駆動部14の駆動を制御するとともに、前記ノズルチップ100の軸方向への相対移動に伴う透過光量の変化に基づいて気泡の有無を判断するコントロール部16と、を備える。
(もっと読む)
液面状態検出装置、自動分析装置および液面状態検出方法

【課題】コンタミネーションの発生を抑制することができ、液状物質における気泡等の液面状態の検出具合の正確性を増大させることができる液面状態検出装置および自動分析装置、液面状態検出方法を提供する。
【解決手段】液状物質1010が収納された容器101および液状物質1010の液面に対して光を照射する光照射部102と、光照射部102が照射した容器101および液状物質1010からの光の色情報を少なくとも有する映像を取得する撮影部103と、撮影部103で撮影した映像の中の色情報を用いて液面の状態を検出する検出部104とを有する。
(もっと読む)
ノズル装置
【課題】ノズル装置において、ノズル内の液面の位置等を高精度に特定できるようにする。
【解決手段】バックライト面において一方側のみをマスク領域56Dとし、それ以外の領域を発光領域58Dとする。これにより撮像を行うと、液体部分64において非マスク側に黒い筋68が生じ、マスク側69においてはそのような筋は生じなくなる。一方、気体部分62においては、マスク側に黒い筋66が生じる。ノズル像を二分割してその半分を解析対象とすることにより、黒い筋の有無から液面Sを高精度に特定可能である。右側の半画像と左側の半画像とを合成してそれを解析対象としてもよい。
(もっと読む)
試料分析装置および試料分析装置の制御方法
【課題】標準試料の測定を適正に行い、検量線を適切に作成することが可能な試料分析装置および試料分析装置の制御方法を提供する。
【解決手段】検体ラックLには、検体を収容した検体容器Tを保持するための保持部が5つ形成されており、アダプタAには、検量線を作成するための標準試料を収容したサンプルカップCを保持するための保持部が6つ形成されている。アダプタAのX軸方向とY軸方向の幅は、検体ラックLと同じであり、アダプタAは、検体ラックLの上面に取り付けられている。このようにアダプタAを装着することにより、検体容器Tを保持する検体ラックLと、サンプルカップCを保持するアダプタAが取り付けられた検体ラックLとを同様に搬送することができる。また、検体ラックLのみを搬送するよう構成された検体搬送部2を用いて、6つの標準試料を2つのラックに跨ることなく搬送することが可能となる。
(もっと読む)
分注装置
【課題】分注時の異常を示す情報を容易に取得可能な液面検知高さ位置の検出手段を有する分注装置の提供。
【解決手段】プローブ1が下降して、試料容器9内の試料10の液面を液面センサ1aが検知すると、プローブ1は所定量下降して停止する。そこから一定時間後にモータ4を駆動することで分注シリンジ3が吸引動作を行う。圧力センサ11は分岐ブロック12を介し、プローブ1,チューブ2,分注シリンジ3を含む分注流路系に接続されている。プローブ1が停止してから分注シリンジ3が吸引動作を開始するまでの圧力信号測定区間の圧力信号から液面検知高さ位置情報を得ることができる。前記圧力信号測定区間における圧力センサ11の出力は、圧力測定部13により測定され、記憶部14に記憶される。前記圧力信号と液面下降距離算出部15および圧力変化量算出部16からの情報に基づいて正誤判定部17で、正常な液面検知が行なわれたか否かを判定する。
(もっと読む)
自動分析装置
【課題】自動分析装置による測定結果や分析結果に重大な支障をきたす事態を回避することが可能な自動分析装置の提供を目的とする。
【解決手段】被検試料の識別情報が記録された記録媒体を有するサンプル容器から、被検試料を吸引して分析を行う。この自動分析装置は、サンプリングプローブと、サンプラと、読取り部とを有する。サンプリングプローブは、サンプル容器から被検試料を吸引する。サンプラは、サンプル容器をサンプリングプローブによる吸引位置まで移送する。読取り部は、この吸引位置においてサンプル容器の記録媒体に記録された識別情報を取得する。
(もっと読む)
自動分析装置
【課題】試料ラックに保持される試料容器内の液体サンプリングの位置を常に単一位置に
固定することで試料分注精度の向上を図ることができる自動分析装置を提供する。
【解決手段】試料容器17を保持する試料ラック18を第1のサンプラ60から第2のサ
ンプラ80に受け渡し移動して、固定された位置で試料ラック18をラックの水平方向及
び上下方向に移動させることで、単一のサンプリング位置におけるサンプル分注プローブ
16による試料吸引ができる自動分析装置。
(もっと読む)
自動分析装置
【課題】液体の分注精度の低下を防ぐことができる自動分析装置を提供する。
【解決手段】第1試薬を収容する試薬容器6から第1試薬を吸引して反応容器3内へ吐出する分注を行う第1試薬分注プローブ70と、第1試薬分注プローブ70下端部の上方から下端部に向けて気体を噴射する第1噴射ノズル71とを備え、第1噴射ノズル71は、第1試薬分注プローブ70が第1試薬を吸引するために試薬容器6内の第1試薬上方に位置しているとき、気体を噴射する。
(もっと読む)
液面検知装置
【課題】使用条件に制限を受けることなく、試験管1内の液面を正確に検知する装置を提供する。
【解決手段】液状物質が収納された筒状容器1の一部に光202を照射する照射部2と、照射部2から照射された光202が筒状容器1を透過した透過光を検出する検出部601とを有する液面検知装置であって、照射部2を筒状容器1の軸心と平行方向に移動させるのに連動して、透過光を検出可能な位置に検出部601を移動させるように、照射部2と検出部601との相対位置を制御する制御部7を有する液面検知装置を提供する。
(もっと読む)
生体試料の分析装置とその方法
【課題】本発明の目的は、生体試料の成分濃度の分析を行う自動分析装置に投入する検体の前処理を実施する装置において、遠心分離の良否,分析試料の量等自動的に判断してマニュアル作業の低減を図り、処理能力の向上と、処置の迅速化を達成することができる生体試料の分析装置を提供することにある。
【解決手段】容器に収納された2つ以上の種類から構成される層のうち、少なくとも1つの層に関する情報を取得し、取得した情報に基づいて、前記容器に収納され前記層を構成する生体試料の分析を行う分析装置であって、容器に光を照射する照射手段と、前記照射手段による光の照射により、前記容器を透過する透過光を検出する撮像手段を備え、前記容器は、側面の全部または一部がラベルで覆われ、前記撮像手段により検出された信号強度に基づき、前記容器内部の層の境界位置の情報を解析する解析手段を備えることを特徴とする。
(もっと読む)
自動分析装置
【課題】容器から吸引する液量が正常であるか否かを検知することができる自動分析装置を提供する。
【解決手段】容器61内へ校正液を供給する校正液供給部63と、校正液供給部63により供給された容器61内の校正液を吸引する吸引部65と、吸引部65により吸引され、容器61内の校正液が供給量V1未満に達したときの液面を検出する検出器64とを備え、吸引部65が吸引を開始してから、検出器64により検出されるまでに吸引した吸引量を算出し、算出した吸引量及び供給量V1に基づいて吸引部65が正常であるか否かを判定する。
(もっと読む)
移し替え制御装置
【課題】 採尿カップから試験管に所定量の内容物を正確に移し替える。
【解決手段】 所定の単位時間当たりの流量の内容物が他の容器に移し替えられるように、採尿カップHCをDR4方向に傾斜させる速度(回転速度)を制御する。さらに、センサ2bで所定量の液面を検知した時間およびセンサ2cで所定量の液面を検知した時間から、移し替えを終える反転時間を算出する。反転時間に採尿カップHCをDR5方向に反転させる。
(もっと読む)
自動分析装置及びプローブ昇降方法
【課題】被検試料を精度よく分注することができる自動分析装置及びプローブ昇降方法を提供すること。
【解決手段】自動分析装置は、被検試料を試料容器から吸引し、反応容器に吐出するための試料プローブ9と、試料容器に対して試料プローブを昇降するプローブ昇降機構10と、所定の被検試料に設定される複数の測定項目のうちの第1測定項目の測定のための被検試料の吸引動作の後に、第2測定項目の測定のための被検試料の吸引動作は行われ、第1測定項目の測定のための被検試料の吸引動作における試料プローブの前記試料液面への突入速度よりも、第2測定項目の測定のための被検試料の吸引動作における試料プローブの試料液面への突入速度を遅くするようにプローブ昇降機構を制御する制御部32とを具備する。
(もっと読む)
自動分析装置
【課題】試料容器ホルダの所定の位置よりも高い位置に保持された試料容器から試料を吸引することができる自動分析装置を提供する。
【解決手段】試料の分注における吸引のとき、サンプル分注プローブ16を試料容器17内の試料が液面検出器16aにより検出される試料検出位置よりも下へ移動して底部検出器16bにより検出される底部検出位置で停止させた後、上方へ移動して試料検出位置と底部検出位置の間の第2の吸引位置で停止させる。
(もっと読む)
試薬調製装置
【課題】 従来に比して試薬調製処理を効率的に行うことができる試薬調製装置を提供する。
【解決手段】
試薬調製装置4は、制御部48を備えており、RO水を作製するRO水作製装置7に接続されている。試薬調製装置4の制御部48は、RO水チャンバ42に所定量のRO水が収容されている場合であっても、RO水作製装置7がRO水の製造を開始してから所定時間が経過するまでは、RO水の製造を継続するようRO水作製装置7を制御する。
(もっと読む)
マイクロチップ送液システム
【課題】反応効率および検出精度の高いマイクロチップ送液システムを提供すること。
【解決手段】特定の抗原と反応する抗体が固定された反応場を有する微細流路と、前記特定の抗原を含む検体溶液を送液する送液ポンプと、を少なくとも備え、前記送液ポンプが検体溶液を送液することにより、検体溶液が微細流路の反応場を繰り返し通過するように構成されたマイクロチップ送液システムであって、前記送液ポンプによって送液される検体溶液の流量が、1,000μl/min〜50,000μl/minの範囲となるように構成されている。
(もっと読む)
検体分析装置及び液体吸引方法
【課題】 液体の液面高さが不明である場合に、従来に比して高速な液体の吸引動作を可能な検体分析装置及び液体吸引方法を提供する。
【解決手段】
試薬の液面高さ情報が記憶されていない場合に、試薬の分注動作に先行して、試薬分注ユニットのピペットを試薬容器内に下降させ、試薬の液面高さを検出し、検出された試薬の液面高さを記憶しておく。試薬の分注を実行するときには、記憶された試薬の液面高さから定めた速さ切り替え高さまで第1の速さでピペットを下降させ、速さ切り替え高さより下方では第1の速さよりも小さい第2の速さでピペットを下降させる。
(もっと読む)
生体試料の分析装置
【課題】生体試料の成分濃度の分析を行う自動分析装置に投入する検体の前処理を実施する装置において、マニュアル作業の低減をはかり、処理能力の向上と低コスト化を達成することができる生体試料の分析装置を提供する。
【解決手段】生体試料の分析装置において、採血管101に異なる種類の光を異なる方向から照射するレーザー光源40および白色光源60と、レーザー光源40および白色光源60による光の照射と同時に、採血管101を側面から撮像する撮像手段70と、撮像手段70で撮像された画像を処理し、採血管101内の層に関する情報を取得する解析手段80と、レーザー光源40、白色光源60および撮像手段70を制御する制御手段90とを備えた。
(もっと読む)
試料分析装置
【課題】試薬容器が他の自動分析装置にセットされた場合にも、液面検知の適否を正しく判定することが可能な試料分析装置を提供する。
【解決手段】R1試薬容器100に貼付されたRFIDタグ104には、前回の測定機構部2の下降調整量(Za)と、前回の測定機構部で試薬の吸引が行われた時に検出された前回下降量(Ma)が記憶されている。また、今回の測定機構部2のバッテリーバックアップRAM204には、今回の測定機構部2の下降調整量(Mb)が記憶されている。これにより、前回下降量(Za)に相当する相当下降量(Zb)は、Zb=Za+(Mb−Ma)により算出することができる。よって、今回の測定機構部2において、R1試薬の吸引が行われるときに検出される下降量が、相当下降量(Zb)よりも小さいとき、R1試薬の液面に泡が発生している可能性が高いことが分かる。
(もっと読む)
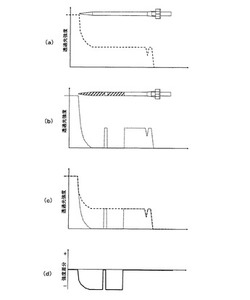
相界面を検出する方法および装置、並びにこれらを備えた実験用機器
本発明は、液体タンク(5.1〜5.8)内の相界面を検出する機器(100)に関する。この機器(100)は、液体タンク(5.1〜5.8)内の相界面の方向へ前進できるセンサ(3.1〜3.8)を備える。静電容量(dc/dt)の変化を検出するために、センサ(3.1〜3.8)の出力信号(s(t))を処理する回路(13)が設けられている。回路(13)は、短いパルス幅の第1信号(s1(t))、s1d)を出力信号(s(t))からろ過除去するための第1フィルタモジュールを設けた第1チャネルと、より大きなパルス幅の第2信号(s2(t)、s2d)を出力信号(s(t))からろ過除去するための第2フィルタモジュールを有する第2チャネル(40)とを備えている。コンパレータモジュール(11)を有するコントローラモジュール(8)をさらに使用しており、このコントローラモジュールは第1信号(s1(t)、s1d)が第1閾値に達しているかどうかを決定する。第2信号(s2(t)、s2d)が所定の第2信号基準を満たしているかどうかを決定する処理モジュール(12)をさらに設けている。 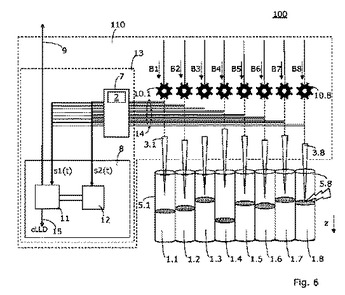 (もっと読む)
(もっと読む)
1 - 20 / 103
[ Back to top ]