
Fターム[3B150JA01]の内容
Fターム[3B150JA01]の下位に属するFターム
Fターム[3B150JA01]に分類される特許
1 - 12 / 12
ミシンのモータ制御装置
【課題】モータの低速回転時のトルクリップルによる振動を抑制する。
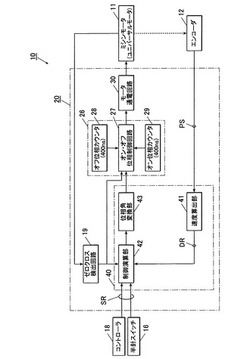
【解決手段】ミシンモータ11をオン−オフ制御する半導体スイッチング手段と、交流電源の電源電圧のゼロクロスを検出するゼロクロス検出手段19と、ミシンモータの速度を設定する速度設定手段18,16と、ミシンモータの現在速度を検出する速度検出手段12と、設定速度と現在速度との速度偏差に基づいて電源電圧正弦波形に対する電力供給のオン期間を定めるモータ出力制御手段40と、モータ出力制御手段の定めるオン期間に基づいて半導体スイッチング手段のオン−オフ動作させる半導体駆動手段30とを備えるミシンのモータ制御装置10において、モータ出力制御手段は、ゼロクロスの検出間隔を一周期とした場合に、当該一周期の前端側と後端側とに二分して前記オン期間を定める。
(もっと読む)
ミシンの糸調子装置

【課題】 常に安定した糸の張力を得ることのできるミシンの糸調子装置を提供する。
【解決手段】 ミシンの糸調子装置1において、駆動ロッド4と推力伝達ロッド20の間に推力反転手段を設け、さらに皿押え7と駆動ロッド4からなる糸調子器側可動部重量と、駆動手段と推力伝達ロッド20からなる駆動手段側可動部重量をほぼ等しくなるように構成することで、縫製時のミシン頭部MFAHの振動により、ミシン可動部(糸調子器側可動部および駆動手段側可動部)に加わった振動の加速による力を推力伝達手段を介して力の方向を反転させ相殺させることによって、糸調子皿6を押圧する皿押え7の押え力(正方向の皿押え力)として作用するのを防止した。
(もっと読む)
ミシン、メンテナンス情報報知プログラム及びその記録媒体
【課題】縫製時間と針数の少なくとも一方の累積値に基づいてメンテナンス情報を報知する報知時期を演算し、報知時期に達した場合にメンテナンス情報を複数回報知可能にしたミシン、メンテナンス情報報知プログラム、その記録媒体を提供する。
【解決手段】縫製時間Taと針数Na,Na1,Na2の累積値の何れかがメンテナンス情報を報知する複数の報知時期の何れかに達したか否かが判断され(S4)、メンテナンス情報表示回数Dに「3」が設定されて(S6)、予め設定されているメンテナンス情報を液晶ディスプレイ28に表示させる(S9)。次に、メンテナンス情報表示回数Dが「1」だけデクリメントされる(S10)。このメンテナンス情報が3回表示されると、S7の判定がNoになるので、メンテナンス情報が表示されなくなる。
(もっと読む)
多針式キルティングマシンにおける針駆動装置
【解決手段】キルティングステーション7上でキルティング生地4の送り方向Xに対し直交する軸線方向へ針24a,26a,27aを並設した針支持体23,25を送り方向Xで複数組並べて配置し、各針支持体23,25の上下動に伴う各針24a,26a,27aの縫製運動により、キルティングステーション7上でキルティング生地4を送りながらキルティング生地4にキルティング加工を施す。各組の針支持体23,25は、各組ごとの駆動系M23,M25により、同時に上下方向Zへ運動し得るばかりでなく、単独で上下方向Zへ相対運動し得る。各組ごとの駆動系M23,M25においては、各組の針支持体23,25が駆動モータにより電磁クラッチを介して上下方向Zへ運動し得る。
【効果】各針支持体23,25の各針24a,26a,27aにおいて縫製運動の自由度を向上させることにより縫製可能なキルティングパターン範囲を広げることができる。
(もっと読む)
多頭刺繍機
【課題】多頭刺繍機において、標準部品を用いて主軸の捩れを抑え、安価な構成でミシンヘッドの台数を増やす。
【解決手段】3〜15本の針を並設したミシンヘッドの21〜70台を、多頭刺繍機1の機枠2に横一列に並設する。ミシンヘッド3のヘッド中心間ピッチ(P1)を135〜400mmに設定する。機枠2の前面側に全ヘッド3を貫通する主軸4を配置し、機枠2の背面側に二台のモータ12を設置する。モータ12の出力軸13をプーリ14、ベルト15、プーリ16を介して主軸4の両端部に連結する。
(もっと読む)
ミシンの糸調子装置
【課題】部品点数を減らすことができて、部品の組み付け作業の容易化、応答性の向上、小型化、コストダウンを図る。
【解決手段】糸を挟持する一対の糸調子皿31,32と、一方の糸調子皿31を他方の糸調子皿32に対して接離させるように一方の糸調子皿31に当接して移動可能な皿押さえ33と、一方の糸調子皿31が他方の糸調子皿32に対して接近するように皿押さえ33を駆動させる駆動機構4と、強磁性材料で形成されたミシン頭部フレーム2内に設けられ、駆動機構4を駆動させる駆動源5と、を備え、駆動源5は、永久磁石52,53が設けられた可動子6と、永久磁石52,53の周りに所定間隔をあけて巻回されたコイル55が設けられた固定子7と、を有するミシンの糸調子装置1において、ミシン頭部フレーム2をコイル55のコイルヨークとした。
(もっと読む)
状態復帰可能な刺繍ミシン
【課題】状態復帰可能な刺繍ミシンを提供する。
【解決手段】電源からの電力の供給を受けて駆動する刺繍ミシンであって、
少なくとも該電力の供給が断たれる直前の刺繍縫いの縫い目位置とミシンの状態を記憶し、該電力が断たれた後も該刺繍縫いの縫い目位置と状態とを保存するための手段と、次の電源オンの再開にあたって、前記保存するための手段に保存されたミシンの刺繍縫いの縫い目位置と状態を読み込んで、ミシンを保存された状態に復帰させる手段と、を備えたこと。
(もっと読む)
ミシンの糸調子装置
【課題】 回転角度区間ごとの糸張力の調整の入力の容易化を図る。
【解決手段】上軸の回転角度の変化に応じて糸張力の大きさを切り替える糸調子装置93であって、糸張力の発生源であるアクチュエータ19と、上軸の1回転中の複数の回転角度区間ごとに固有の調整比率と全回転角度区間に共通する基準糸張力量とを記憶する記憶手段54と、上軸の回転角度の変化に伴い、対応する回転角度区間の調整比率を基準糸張力量に乗じて求めた値に基づいて、アクチュエータの出力を切り替える制御を行う動作制御手段51と、基準糸張力量の変更を入力する設定入力手段81〜84とを備えている。
(もっと読む)
ミシンのモータ制御回路
【課題】 モータの回転数の検出を安価で、かつ、安全性を向上した方法で実現できること。
【解決手段】 電源回路1からの出力をモータ3に供給する駆動回路4の駆動出力回路4Aと、駆動回路4のオン・オフ制御信号を生成する駆動制御回路4Bとの間に、また、モータ3の両端の逆起電圧を検出する電圧検出回路2Aと、モータ3の両端に接続した電圧検出回路2Aから信号を得て検出制御信号とする検出制御回路2Bとの間に、信号伝達が可能で、かつ、電気的絶縁を持たせた。したがって、電源回路1は通常商用電源から供給される電力をモータ3に供給しても、駆動回路4及び逆起電圧検出回路2内で、駆動制御回路4Bと駆動出力回路4A、電圧検出回路2Aと検出制御回路2Bとが互いに絶縁しているので、電力側の回路と弱電制御系回路が接触する可能性がなくなる。
(もっと読む)
二本針ミシンの針棒機構
【課題】 針棒の落下を防止する。
【解決手段】 縫い針を保持する一対の針棒20と、各針棒を上下動可能に個々に支持する針棒支持体40と、各針棒を保持する針棒抱き51を用いて各針棒を上下動させる針棒上下動機構50と、針棒抱きによるそれぞれの針棒の保持を選択的に保持状態と解除状態とに切り換え可能なクラッチ機構60と、クラッチ機構により保持を解除状態とされた針棒を針棒支持体に保持させるストッパ機構70と、を備え、各針棒に、針棒抱きに係止されて落下を停止させる落下防止用の係止部26を設けた。
(もっと読む)
二本針ミシンの針棒機構
【課題】 針棒の誤った保持を回避する。
【解決手段】 第一、第二の係合穴21,22を形成した一対の針棒20と、各針棒を支持する針棒支持体40と、針棒抱き51を用いて各針棒20を上下動させる針棒上下動機構50と、第一の係合穴に対して先端を挿脱させるクラッチ部材61を用いて針棒抱きによるそれぞれの針棒の保持を選択的に保持状態と解除状態とに切り換え可能なクラッチ機構60と、クラッチ機構により保持を解除状態とされた針棒の第二の係合穴に対して先端を挿脱させるストッパ部材71を用いて針棒支持体に保持させるストッパ機構70とを備え、各クラッチ部材の先端部と第二の係合穴とが、互いに挿入できない形状、大きさ又は配置とした。
(もっと読む)
刺繍ロボット
ミシンヘッド(1)の上部に配設した複数個のボビン(21)が収容できるボビン収容部(22)と、このボビン収容部(22)に収容可能なボビン(21)の個数に対応して設けた糸張力調節機構(25)及び糸送出機構(28)を備えた糸調節機構(24)と、所要のボビン(21)に対応する糸送出機構(28)を所定の針(10)に糸通しを行う糸通し装置(5)の上方に選択的に位置させる糸選択機構(29)とからなる刺繍ロボットにおいて、糸(10)を糸通し装置(5)に導くように糸送出機構(28)に糸送出管(28a)を配設するとともに、この糸送出管(28a)の下端部に、糸送出管(28a)から垂下された糸(11)を横方向に払って仮保持し、糸通し装置(5)の糸挟持部材(31)によって挟持できるようにする糸払い・保持機構(28b)を配設する。 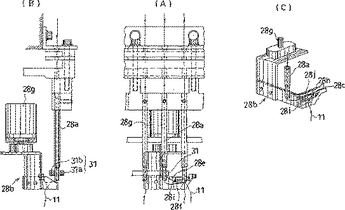 (もっと読む)
(もっと読む)
1 - 12 / 12
[ Back to top ]