
Fターム[3B150NA20]の内容
Fターム[3B150NA20]に分類される特許
1 - 20 / 80
針振り機構を備えたミシン
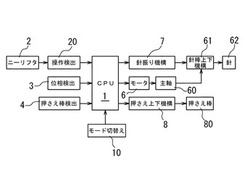
【課題】 ニーリフターで布押さえの上げ下ろしと針振りの両方を行えるミシンを提供する。
【解決手段】 ミシン上軸位相検出装置3からの信号によりミシン停止中であれば、ニーリフター2の操作により布押さえ上下機構8のみの制御を行い、ミシン稼働中であれば、ニーリフター2の操作により針振り機構7の制御を行い、ニーリフター2の操作量に応じて針62を振らせて縫いを行う。同時にミシンモータ6の速度制御を行う。
(もっと読む)
ベルトループ付けミシン及びベルトループの折り返し方法

【課題】ベルトループを適正に縫着することができるベルトループ付けミシン及びベルトループの折り返し方法を実現する。
【解決手段】ベルトループBの中央側へ折り返す端部(一端部b1、他端部b2)がその中央側からはみ出すことが想定される場合に、その一端側が固定されたベルトループBを挟持したループクランプ31を、ベルトループBの長手方向と交差する方向であって、そのはみ出しを打ち消す方向に所定量移動させた後に、フォーク部材38でベルトループBの端部を折り返すようにすることで、その端部をベルトループBの中央側に折り重ねることが可能になって、ドッグイヤーの発生を抑えることを可能にした。
(もっと読む)
ミシンのアンダーカバー及びミシン
【課題】ミシンテーブルの下方に配置した回路基板上の発熱部品から発生する熱を効率よく放熱することができるようにする。
【解決手段】アンダーカバー200は、その第2下面202の発熱素子と対応する位置に、下方に突出した発熱素子接触部240を形成する。発熱素子接触部240は、発熱素子と接触する平坦面241を備えているため、発熱素子と確実に接触し、伝熱面積を確保することができる。アンダーカバー200は、発熱素子接触部240を介し、発熱素子で発生した熱を効率的に放熱することができる。
(もっと読む)
ミシンのアンダーカバー
【課題】ミシンテーブルの下方に配置された回路基板の鉛直方向寸法を縮小し、作業者の作業性を向上できるようにする。
【解決手段】アンダーカバー200をミシンテーブル20に取付けた際、アンダーカバー200の下面が第1カバー部210よりも高い位置となる第2カバー部220の内部にスイッチレバー50の軸受52を配置したので、メンテナンス作業者は、第1カバー部210下方の空間よりも広い空間で作業をすることができる。
(もっと読む)
ミシンのアンダーカバー及びミシン
【課題】ミシンテーブルの下方に配置された回路基板の鉛直方向寸法を縮小し、作業者の作業性を向上できるようにする。
【解決手段】ミシン本体100の下部を覆うアンダーカバー200をミシンテーブル20の下方に設け、アンダーカバー200の第2下面202に、ミシン本体100の駆動制御に用いる回路基板300を構成する回路基板310、320を、それらの基板311、321上であって制御素子312、322を実装した面が第2下面202と平行となるように配置している。
(もっと読む)
ミシン及びミシンの制御方法
【課題】縫製作業を開始することなく上糸に付加する張力の確認を行うことができるミシン及びミシンの制御装置を提供する。
【解決手段】CPUは、足踏みペダルの位置が踏み返し位置(Pb1)以上踏み返された位置である駆動領域に属するか否かを判断する(S90)。踏み返し位置(Pb1)は、縫製動作のために作業者が足踏みペダルを中立位置(Pn)から踏み込み位置(Pf2)へ操作する方向と異なる方向に設けた位置である。駆動領域に属する場合、CPUは、布押え部材の押え位置への移動を禁止し(S170)、糸調子ソレノイドをONにして上糸に張力を付加する(S180)。作業者は、上糸張力を確認することができる。
(もっと読む)
ミシン
【課題】指定された長さの縫目部をより正確に形成することが可能なミシンを提供すること。
【解決手段】ミシンにおいて、縫製対象物に縫製される所定縫目の少なくとも一部である縫目部の所定方向の長さが取得される(S10)。縫製対象物とともに移動する少なくとも1つの標識が撮影され、画像データが生成される(S80)。少なくとも画像データに基づいて、少なくとも1つの標識の移動量が算出される(S80)。算出された移動量に基づき、所定方向における縫目部の開始点側とは反対側に設定される所定範囲を縫製していると判断される場合に、ミシンモータの回転速度が所定値以下に設定される(S80)。縫目部の所定方向の長さが、指定された長さに達したと判断された場合に(S130:YES)、縫目部の縫製が終了される(S150:YES又はS170)。
(もっと読む)
ミシン
【課題】押え足を上下動させる押え足上下動機構を利用して、目飛びの発生を防止する。
【解決手段】押え足上下動機構の駆動を制御する制御手段は、針棒の揺動位置(ステップS2)と、剣先と上糸ループが出合うタイミングにおける針棒の上下位置(ステップS3)とに調時して、押え足を所定高さまで上昇させて(ステップS4)、上糸ループの大きさを変更する。押え足を上昇させる高さを調整することで、剣先が上糸ループを確実捕捉できるように、当該上糸ループの大きさを最適にすることが可能となる。
(もっと読む)
ミシンの布押え装置
【課題】加工布の布厚が変化しても位置決めの微調整を容易に行うことができるミシンの布押え装置を提供すること。
【解決手段】ミシンは、足踏みペダルの踏み込み量をポテンショメータで検出する。制御装置は足踏みペダルの踏み込み量が作動領域であるかを判断する(S28)。足踏みペダルの踏み込み量が作動領域である場合、布押え部材は、押え高さに相当する累積パルス数の演算結果に基づいた高さになる(S30)。作業者は、足踏みペダルを作動領域まで踏み込むことで、踏み込み量に応じて布押え部材の高さを中間位置と布押え位置との間で微調整することができる。
(もっと読む)
繊維強化複合材料用プリフォームの縫合装置及び縫合方法
【課題】幅が変化する形状のプリフォームの場合にも生産性を向上できるようにする。
【解決手段】移送方向Rへのプリフォーム11の移送に伴い、作業幅領域S1に対応するプリフォーム11の幅(移送方向Rと直交する方向のプリフォーム11の長さ)が変化して(作業幅領域S1の幅が変化して)或るステッチ針16が作業幅領域S1から外れた場合、第1支持ブロック15及び第2支持ブロック20が下動されてステッチ針16及び第1接触プレート211が実線で示す作業位置から鎖線で示す退避位置に切り換え配置される。又、糸ガイド33が実線で示す作業位置から鎖線で示す退避位置に切り換え配置されると共に、第2接触プレート411が実線で示す作業位置から鎖線で示す退避位置に切り換え配置される。
(もっと読む)
縫製装置及びプログラム
【課題】縫製装置の操作部材について報知する。
【解決手段】使用者が無負荷のペダル20〜24のいずれかを半踏みすると、そのペダル20〜24のいずれかに対応したスイッチsw1がオンでsw2がオフとなり(S12:YES、S13:NO)、いずれかの発光部材52〜56が点灯から遅い点滅となる(S15)。使用者が更に半踏み状態となっているペダル20〜24のいずれかを踏み込むと(S10:NO、S11:YES、S12:YES、S13:YES)、ペダル20〜24に対応する発光部材52〜56のいずれかが遅い点滅から早い点滅となるように、CPU35が発光部材52〜56のいずれかに対して表示状態の切り替え制御をする(S14)。
(もっと読む)
穴かがりミシン
【課題】容易に能率よく糸通し作業を行うことができる穴かがりミシンを提供する。
【解決手段】操作者が操作パネル4の選択キー113を用いて糸通しモードを設定すると、制御装置5が制御するカッター進退用ステッピングモータ91の駆動力によって、カッター51が待機している初期位置より、縫針32から遠ざかる退避位置へと移動する。これにより、糸通し作業時にカッター51が妨げになるのを回避し、容易に能率よく糸通し作業を行うことができる。
(もっと読む)
ミシン
【課題】既存のミシン備わる機構や装置を利用することにより、複数の窪みや穴からなる複雑な模様であっても、模様の形成が容易にできるパーチメントクラフトに適したミシンを提供する。
【解決手段】ミシン10は、押え足が装着される押え棒16に着脱可能な突状部材51と、縫針が装着される針棒15に着脱可能な針部材56とを備えている。押え棒16は、押え棒上下機構部によって上下に駆動される。突状部材51は、押え棒16と共に下方へ移動することにより、被加工物70を下方へ押圧し、被加工物70に窪みを形成する。針棒15は、針棒上下機構部によって上下に駆動される。針部材56は、針棒15と共に下方へ移動することにより、被加工物70を貫いて、被加工物70に穴を形成する。これにより、被加工物70は、窪み及び穴から構成される模様が形成される。
(もっと読む)
ミシン
【課題】ミシンモータにより中押さえの上下動ストロークを容易に検出する。
【解決手段】ミシンモータ2aから動力を得て、縫い針の上下動に同期して中押さえ29に上下動させる中押さえ上下動機構M1と、中押さえモータ42を駆動源として、ミシンモータによる中押さえの上下動の上死点位置と下死点位置の高さを上下方向に推移させる中押さえ高さ調節機構M4とを備え、ミシンモータによる中押さえの上死点位置と下死点位置との各々において、中押さえモータによる中押さえの最上位置から針板に当接するまでの下降動作量を検出し、前記ミシンモータによる上死点位置と下死点位置とにおける各下降動作量に基づく中押さえ高さの差からミシンモータによる上下動のストロークを算出するストローク取得制御手段73を備えている。
(もっと読む)
ミシン
【課題】薄い被縫製物の厚さを検出する。
【解決手段】主軸角度検出手段2bと、中押さえ29と、中押さえ上下動機構M1と、中押さえモータ42により中押さえ上下動機構とは別に中押さえを上下移動させる中押さえ高さ調節機構M4と、中押さえモータの軸角度検出手段81と、中押さえの下降時に被縫製物への当接により中押さえモータの出力軸に外部トルクが加わると中押さえを上方移動させるように中押さえモータに対して高さ可変制御を行う中押さえ高さ制御手段72と、中押さえの下死点における中押さえモータの検出軸角度から被縫製物の厚さを求める厚さ取得処理手段72とを備え、中押さえ高さ制御手段は、高さ可変制御の前に、中押さえが下死点となる時の中押さえ高さが針板上面よりも下方となるように前記中押さえモータを制御する。
(もっと読む)
ミシン
【課題】 縫製開始時に間欠押えを針板と同じ位置に設定してから1針目の縫製を行う場合において、糸巻き処理時に間欠押えが針板に衝突するのを防止し、間欠押えと針板との衝突により発生する騒音を防止することができるミシンを提供する。
【解決手段】 糸巻き処理を実行すると、先ず、RAM64に記憶されたデフォルト値を読み出して間欠押え6をデフォルト値(針板2aの上面から5mm上方)で示す位置に上昇させる(S30)。次に、ミシンモータ72を起動させて糸巻機構50による糸巻き処理を実行する。糸巻き処理を実行すると、起動ペダル70のOFF待ち状態となる。作業者が起動ペダル70をOFFにした場合(S32;Yes)、ミシンモータ72の駆動を停止させてから(S33)、間欠押え6を予め設定した位置に下降させた後(S34)、S3に戻る。
(もっと読む)
ミシン
【課題】布を潰すことなく中押さえを上下動させる。
【解決手段】縫い針108を上下動させるミシンモータ2aにより回転駆動される主軸2の角度を検出する主軸角度検出手段2bと、縫製時に被縫製物の浮き上がりを防止する中押さえ29と、縫い針に同期して中押さえに上下動させる中押さえ上下動機構M1と、中押さえモータ42により中押さえの高さを調整する中押さえ高さ調節機構M4と、中押さえモータを制御する中押さえ高さ制御手段73ととを備え、中押さえ高さ制御手段は、中押さえが下降を行う所定の回転区間で、外部トルクTfと釣り合うように駆動トルクTmの出力を行う高さ可変制御を行うと共に、高さ可変制御後には高さ可変制御区間の最終出力軸角度を維持するように中押さえモータを追従制御させる。
(もっと読む)
ミシン
【課題】布厚等にかかわらず、安定した押さえ圧で布を押さえ、損傷を防止すること。
【解決手段】布押さえ機構と、押さえモータ11と、検出手段12と、制御手段100と、を備えるミシン1において、布押さえ21の下降の際に、目標となる下降位置の指令信号を押さえモータに送信すると共に、検出手段により検出された布押さえの位置をフィードバックして押さえモータの駆動を通常電流で制御する位置制御手段100と、押さえモータに通電する駆動電流を通常電流よりも減少することで布押さえがゆっくり降下し被縫製物を押さえる押さえ圧を低下する圧力制御手段と、布押さえの下降制御を位置制御手段から圧力制御手段に切り替える布押さえの切替位置を記憶する記憶手段104と、下降する布押さえが記憶手段に記憶された切替位置に到達したときに、布押さえの下降制御を位置制御手段から圧力制御手段に切り替える切替制御手段100と、を備えた。
(もっと読む)
ミシンの布押さえ昇降装置
【課題】電源遮断時の布押さえ高さの固定状態を解消する。
【解決手段】布押さえ5を昇降するエアシリンダ4と、空気圧供給源20からエアシリンダの各空気室4U,4Dへ空気圧を供給する第一の電磁弁10と、布押さえを操作する操作入力手段30と、第一の電磁弁を制御して布押さえの高さを切り換え、下降時間の長さにより布押さえを中間停止させる制御手段40と、エアシリンダの各空気室に設けられた予備排気経路71,72と、各予備排気経路に設けられた逆止弁73aと、各逆止弁に空気圧を供給する閉塞圧供給経路74と、各逆止弁の排気側に対する空気圧供給状態と大気解放状態とを切り換え可能な第二の電磁弁75と、主電源の通電時には空気圧供給状態とし、主電源の切断時には大気解放状態に第二の電磁弁を切り替える押さえ解放制御回路77を備えている。
(もっと読む)
ミシン
【課題】中間位置の設定を容易に行うことができ、作業効率を向上すること。
【解決手段】布押さえ機構と、押さえモータ11と、操作ペダル70と、制御手段100と、を備えるミシン1において、布押さえを下降させる場合に、当該布押さえが被縫製物に当接して下降が停止したときの検出手段(12)によって検出された押さえモータの駆動量に応じた布押さえの下降量と、下降前の布押さえの針板からの初期高さとから被縫製物の厚さを算出する布厚算出手段(100)と、算出された布厚に加算する補正値を記憶する補正値記憶手段(104)と、算出された布厚に補正値を加算して中間位置を算出する中間位置算出手段(100)と、算出された中間位置を記憶する中間位置記憶手段(104)と、を備え、制御手段は、中間位置の算出後、布押さえで被縫製物を押さえた状態から布押さえを上昇させる際に、記憶された中間位置で布押さえの上昇を停止させる。
(もっと読む)
1 - 20 / 80
[ Back to top ]