
Fターム[3B150NB07]の内容
Fターム[3B150NB07]の下位に属するFターム
反転押え
Fターム[3B150NB07]に分類される特許
1 - 20 / 111
テープ縫い付け装置
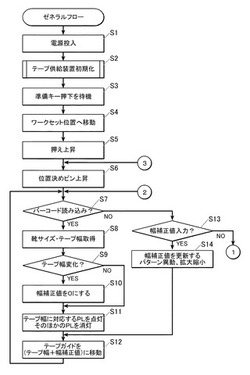
【課題】テープの縫い付けを自動化し、テープ幅の変化に基づいて縫製パターンを変化させて、テープの縫い目の両側のコバを均一化する。
【解決手段】身頃にテープを縫い付ける装置であって、テーブル上に出没し、身頃を位置決めする基準ピン16と、位置決めされた身頃を把持する身頃押え部11、12と、縫製パターンに基いて、身頃押え部を水平一平面に沿って移動させるX−Y送り装置と、身頃上にテープを供給するテープ供給装置3と、縫製パターンに基づいて縫製物にテープを縫い付けるミシン2と、テープ幅の変化に基づいて前記縫製パターンを変化させる制御手段5と、を備える。
(もっと読む)
ベルトループ付けミシン

【課題】 フォーク部材をベルトループから外す際にドッグイヤーを形成してしまうことを抑え、品質不良を抑制する。
【解決手段】 ベルトループ付けミシンは、ベルトループを挟持し且つ解放可能なループクランプと、ループクランプで挟持されたベルトループを挟んで回転することによりベルトループの端部を中央側に折り返すフォーク部材と、フォーク部材を回転させるとともに、ベルトループの端部を折り返す位置にフォーク部材を進退させるフォーク部材駆動部と、ベルトループがベルトループ形状となるように折り返された端部を縫い針により生地に縫い付ける針上下動機構とを備えている。フォーク部材によりベルトループの端部を挟んで回転させて当該端部を折り返した後に、ベルトループの端部及び生地に縫い針を貫通させた状態で、ベルトループの端部を折り返した位置からフォーク部材を退避させてから、ベルトループの端部を縫い針により生地に縫い付ける。
(もっと読む)
ベルトループ付けミシン及びベルトループの折り返し方法
【課題】ベルトループを適正に縫着することができるベルトループ付けミシン及びベルトループの折り返し方法を実現する。
【解決手段】ベルトループBの中央側へ折り返す端部(一端部b1、他端部b2)がその中央側からはみ出すことが想定される場合に、その一端側が固定されたベルトループBを挟持したループクランプ31を、ベルトループBの長手方向と交差する方向であって、そのはみ出しを打ち消す方向に所定量移動させた後に、フォーク部材38でベルトループBの端部を折り返すようにすることで、その端部をベルトループBの中央側に折り重ねることが可能になって、ドッグイヤーの発生を抑えることを可能にした。
(もっと読む)
ミシン
【課題】イサリ量を低減する。
【解決手段】搬送される上布CUと下布CDの終端部をそれぞれ検出する上布と下布の検出手段91、81と、送られる上布のみを押圧する上布送り調節機構9と、送られる下布のみに押圧力を付与する下布送り調節機構5と、布送り機構の送り量と各検出手段の検出タイミングとによりイサリ量を算出する終端部位置算出部51と、イサリ量とそのイサリ量を生じた時の上布と下布の押圧力の差とを対応づけて記録する記録部54と、記録部の二以上の縫製によるイサリ量と上布と下布の押圧力の差との記録から適正な上布と下布の押圧力の差を求め、それ以降の縫製時に適正な上布と下布の押圧力の差を生じるように上布送り調節機構又は下布送り調節機構とを制御する調節制御部51とを備えている。
(もっと読む)
ミシンのアンダーカバー及びミシン
【課題】ミシンテーブルの下方に配置された回路基板の鉛直方向寸法を縮小し、作業者の作業性を向上できるようにする。
【解決手段】ミシン本体100の下部を覆うアンダーカバー200をミシンテーブル20の下方に設け、アンダーカバー200の第2下面202に、ミシン本体100の駆動制御に用いる回路基板300を構成する回路基板310、320を、それらの基板311、321上であって制御素子312、322を実装した面が第2下面202と平行となるように配置している。
(もっと読む)
ミシン及びミシンの制御方法
【課題】縫製作業を開始することなく上糸に付加する張力の確認を行うことができるミシン及びミシンの制御装置を提供する。
【解決手段】CPUは、足踏みペダルの位置が踏み返し位置(Pb1)以上踏み返された位置である駆動領域に属するか否かを判断する(S90)。踏み返し位置(Pb1)は、縫製動作のために作業者が足踏みペダルを中立位置(Pn)から踏み込み位置(Pf2)へ操作する方向と異なる方向に設けた位置である。駆動領域に属する場合、CPUは、布押え部材の押え位置への移動を禁止し(S170)、糸調子ソレノイドをONにして上糸に張力を付加する(S180)。作業者は、上糸張力を確認することができる。
(もっと読む)
ミシン用操作装置及びミシン
【課題】ユーザの足の操作に応じてミシンを動作させるミシン用操作装置において、操作性の向上を図る。
【解決手段】ミシン本体に接続されて、ユーザの足元に置かれるミシン用操作装置40は、基台41上に、コントロールボックス42、ペダル装置43、スイッチ操作部44を備える。スイッチ操作部44は、右壁、後壁、左壁からなる手前側が開放した立上り壁48の内壁面に、返し縫いスイッチ49、押え上下スイッチ50、糸切りスイッチ51を設けて構成する。立上り壁48の内側の空間部に、ユーザの足が載置される載置台52を設ける。載置台52は、底部に設けられた4個のキャスター53により任意の方向に移動自在に支持される。
(もっと読む)
ミシン用操作装置及びミシン
【課題】ユーザの足の操作に応じてミシンを動作させるミシン用操作装置において、ユーザの足の大きさの大小にかかわらず、操作性の向上を図る。
【解決手段】ミシン本体に接続されて、ユーザの足元に置かれるミシン用操作装置40は、基台41上に、コントロールボックス42、ペダル装置43、スイッチ操作部44を備える。スイッチ操作部44は、右壁、後壁、左壁からなる手前側が開放した立上り壁48の内壁面に、返し縫いスイッチ49、押え上下スイッチ50、糸切りスイッチ51を設けて構成する。立上り壁48の左壁を可動壁部48aとし、可動壁部48aの左右方向位置を変更する間隔調整機構56を設ける。
(もっと読む)
縫目のほつれ止め方法及び縫目のほつれ止め装置
【課題】二重環縫いの縫目に特有のほつれの発生を有効に防止することができ、針糸の付与張力の影響を受け難い新たなほつれ止め方法、及びこのほつれ止め方法の実施に使用するほつれ止め装置を提供する。
【解決手段】針落ち位置A,Aの後側に配した糸掛けフック3を配し、該糸掛けフック3を揺動して、先端のフック部3bをルーパ1の後側に接近させて、進出端にあるルーパ1が捉えた複数の針糸ループのうち、進出側に位置する針糸ループを保持し、この状態で少なくとも1針分の縫製動作を行わせ、保持した針糸ループに下降する針を通し、この針が保持する針糸で前記針糸ループを自糸ルーピングし、この自糸ルーピング部によりルーパ糸を押え、ルーパ糸の抜けを防止する。
(もっと読む)
ミシン
【課題】押え足を上下動させる押え足上下動機構を利用して、目飛びの発生を防止する。
【解決手段】押え足上下動機構の駆動を制御する制御手段は、針棒の揺動位置(ステップS2)と、剣先と上糸ループが出合うタイミングにおける針棒の上下位置(ステップS3)とに調時して、押え足を所定高さまで上昇させて(ステップS4)、上糸ループの大きさを変更する。押え足を上昇させる高さを調整することで、剣先が上糸ループを確実捕捉できるように、当該上糸ループの大きさを最適にすることが可能となる。
(もっと読む)
ミシンの布押え装置
【課題】加工布の布厚が変化しても位置決めの微調整を容易に行うことができるミシンの布押え装置を提供すること。
【解決手段】ミシンは、足踏みペダルの踏み込み量をポテンショメータで検出する。制御装置は足踏みペダルの踏み込み量が作動領域であるかを判断する(S28)。足踏みペダルの踏み込み量が作動領域である場合、布押え部材は、押え高さに相当する累積パルス数の演算結果に基づいた高さになる(S30)。作業者は、足踏みペダルを作動領域まで踏み込むことで、踏み込み量に応じて布押え部材の高さを中間位置と布押え位置との間で微調整することができる。
(もっと読む)
ボタン穴かがりミシン
【課題】ボタン穴かがり縫いの作業性を向上できるボタン穴かがりミシンを提供する。
【解決手段】ボタン穴かがりミシン(20)は、縫い針(41)を支持した状態で上下動する針棒(40)と、上下方向及び水平方向に移動可能に配設され、下降位置において被縫製物の縫い位置近傍を押さえる布押さえ(70)と、前記針棒を旋回させる旋回手段(旋回モータ84)と、縫い糸を交換する際に前記針棒を旋回手段により180°旋回させる指令信号を出力する操作手段(交換モードキー90d)を備えたボタン穴かがりミシンにおいて、前記操作手段が操作される毎に、前記針棒を180°反転させるように前記旋回手段を制御する制御手段(CPU13)を備える。
(もっと読む)
飾り縫いミシン
【課題】飾り縫いミシンの縫い品質を向上させる。
【解決手段】複数の縫い針21,22を上下動させる針上下動機構と、各縫い針の針糸Tを引き上げる天秤51,52と、各縫い針を布より上位置で停止させるための上位置検出手段と、被縫製物の押さえと解放を切り換え可能な布押さえ44と、各縫い針の挿通部102と片持ちの針板爪101を有する針板100と、各縫い針の針糸に個々に糸張力を付与する糸調子機構30とを備え、糸調子機構から各縫い針までの針糸の間に設けられ、各針糸ごとに被縫製物の回転操作に応じた個々の糸繰り出し量で繰り出しを行う糸繰り出し機構60を備え、上位置検出が行われて縫い針が停止した時に、糸繰り出し機構による各針糸の繰り出しを行う制御手段80を備えている。
(もっと読む)
ベルトループ付けミシン
【課題】適正なベルトループの縫着を行う。
【解決手段】針上下動機構と、ループクランプ31と、ループ押さえ52と、載置台51と、布押さえ71と、第一の移動機構50と、第二の移動機構70と、クランプ移動機構30と、単一のフォーク部材38とを備え、第二の移動機構の駆動源を布送りモータ74とし、ループクランプが挟持するベルトループBの幅方向に折り目となる折り目縫い目L2を形成し、当該折り目縫い目から折り返される方向にクランプ移動機構によりループクランプを移動させ、折り返されたベルトループにより隠れた状態となる折り目縫い目の上から重ね縫い目L3を形成する重ね縫い目形成制御と、重ね縫い目形成制御の実行の際に、第二の移動機構の布送りモータを制御して設定補正量に応じて折り目縫い目に対して重ね縫い目の形成位置を補正する制御を行う重ね縫い目位置補正制御とを行う制御手段80を備えている。
(もっと読む)
ミシン
【課題】縫目の美観の損失及び品質の低下を防止することができるミシンを提供する。
【解決手段】下糸掴み79と下糸掴みバネ91とを上下方向に移動可能とする。下糸掴み79及び下糸掴みバネ91を上昇させて加工布Wに近づけた状態とし、この状態で上糸Tにループを形成させることで、下糸Sにおける上記保持位置P2と上記絡み位置P1とを比較的近接させることができる。この結果、下糸Sにおける絡み位置P1から保持位置P2までの長さを低減することができるので、加工布Wの下面に縫い込まれていく下糸Sの切断端部Seの長さを短くすることができる。
(もっと読む)
穴かがりミシン
【課題】容易に能率よく糸通し作業を行うことができる穴かがりミシンを提供する。
【解決手段】操作者が操作パネル4の選択キー113を用いて糸通しモードを設定すると、制御装置5が制御するカッター進退用ステッピングモータ91の駆動力によって、カッター51が待機している初期位置より、縫針32から遠ざかる退避位置へと移動する。これにより、糸通し作業時にカッター51が妨げになるのを回避し、容易に能率よく糸通し作業を行うことができる。
(もっと読む)
ミシン
【課題】既存のミシン備わる機構や装置を利用することにより、複数の窪みや穴からなる複雑な模様であっても、模様の形成が容易にできるパーチメントクラフトに適したミシンを提供する。
【解決手段】ミシン10は、押え足が装着される押え棒16に着脱可能な突状部材51と、縫針が装着される針棒15に着脱可能な針部材56とを備えている。押え棒16は、押え棒上下機構部によって上下に駆動される。突状部材51は、押え棒16と共に下方へ移動することにより、被加工物70を下方へ押圧し、被加工物70に窪みを形成する。針棒15は、針棒上下機構部によって上下に駆動される。針部材56は、針棒15と共に下方へ移動することにより、被加工物70を貫いて、被加工物70に穴を形成する。これにより、被加工物70は、窪み及び穴から構成される模様が形成される。
(もっと読む)
加工アタッチメント及びミシン
【課題】既存のミシンに備わる機構や装置を利用することにより、複雑な模様であっても、模様の形成が容易にできるパーチメントクラフトに適した加工アタッチメント及びミシンを提供する。
【解決手段】アタッチメント70は、針棒15及び押え棒16を備えるミシンの押え棒16に着脱可能に装着され、本体部71、連結部72、針部材73及び針部材上下機構部74を備える。本体部71は、押え棒15の下端に装着可能である。連結部72は、針棒15の下端に設けられた針抱き43に連結可能であり、針棒上下機構部26による針棒15の上下動に伴って針棒15と共に上下へ移動可能である。針部材73は、被加工物を貫いて被加工物に穴を形成する。針部材上下機構部74は、連結部72の上下動により針部材73を上下動させる。これにより、ミシンにアタッチメント70を取り付けるだけで、被加工物に対し容易に穴を形成することができる。
(もっと読む)
ミシン
【課題】ミシンモータにより中押さえの上下動ストロークを容易に検出する。
【解決手段】ミシンモータ2aから動力を得て、縫い針の上下動に同期して中押さえ29に上下動させる中押さえ上下動機構M1と、中押さえモータ42を駆動源として、ミシンモータによる中押さえの上下動の上死点位置と下死点位置の高さを上下方向に推移させる中押さえ高さ調節機構M4とを備え、ミシンモータによる中押さえの上死点位置と下死点位置との各々において、中押さえモータによる中押さえの最上位置から針板に当接するまでの下降動作量を検出し、前記ミシンモータによる上死点位置と下死点位置とにおける各下降動作量に基づく中押さえ高さの差からミシンモータによる上下動のストロークを算出するストローク取得制御手段73を備えている。
(もっと読む)
ミシン
【課題】 縫製開始時に間欠押えを針板と同じ位置に設定してから1針目の縫製を行う場合において、糸巻き処理時に間欠押えが針板に衝突するのを防止し、間欠押えと針板との衝突により発生する騒音を防止することができるミシンを提供する。
【解決手段】 糸巻き処理を実行すると、先ず、RAM64に記憶されたデフォルト値を読み出して間欠押え6をデフォルト値(針板2aの上面から5mm上方)で示す位置に上昇させる(S30)。次に、ミシンモータ72を起動させて糸巻機構50による糸巻き処理を実行する。糸巻き処理を実行すると、起動ペダル70のOFF待ち状態となる。作業者が起動ペダル70をOFFにした場合(S32;Yes)、ミシンモータ72の駆動を停止させてから(S33)、間欠押え6を予め設定した位置に下降させた後(S34)、S3に戻る。
(もっと読む)
1 - 20 / 111
[ Back to top ]