
Fターム[3B151CB06]の内容
繊維の準備処理 (844) | 処理対象材の形態 (100) | トウ、スライバー又はトップ等の繊維束 (51) | スライバー、粗糸又は篠 (39)
Fターム[3B151CB06]に分類される特許
1 - 20 / 39
その出口にスライバが排出されて載置される、紡績準備機械、特に練条機またはカードに設けられる装置
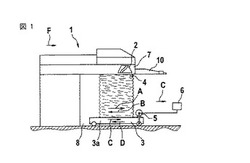
【課題】簡単な方法で、載置されているスライバ(スライバパケット)の機械の載置領域からの変位と、設備的な費用の本質的な削減を可能にするために、載置されたスライバは機械的手段によって移動可能であり、そのことが付加的な容器などなしで、載置領域内および/または載置領域からの、スライバの変位をもたらすようにすることを目的とする。
【解決手段】その出口にスライバが排出装置2によって排出されて、土台3上に載置され、その場合に排出装置と土台は互いに対して移動可能である、紡績準備機械、特に練条機またはカードに設けられる装置において、土台3上に載置されたスライバ(スライバパケット)4が後段に接続されている加工機械へ供給可能である。
(もっと読む)
たとえばフラット・カード、ローラ・カード、練篠フレーム、精梳綿機などの紡績用前処理機において、たとえば綿、合成繊維などの少なくとも一本の繊維スライバ、繊維ウェブなどの繊維材料の質量および/または質量変動を確認する装置

【課題】構造的に簡素な様式で改善された正確な測定を行う。
【解決手段】たとえばフラット・カード、ローラ・カード、練篠フレーム、精梳綿機など
の紡績用前処理機において、たとえば綿、合成繊維などの少なくとも一本の繊維スライバ
、繊維ウェブなどの繊維材料の質量および/または質量変動を確認する装置であって、繊
維材料は触覚要素により機械的に走査され、該触覚要素の偏位は電気信号へと変換される
という装置において、上記触覚要素の位置を検出する非接触式距離センサ(近接センサ)
が配備される。構造および設置に対して簡素な様式にて、改善されて更に正確な繊維束の
測定を促進するために上記距離センサは、光学的または音響的な距離を測定するセンサで
あって電子的評価デバイスに接続されたセンサである。
(もっと読む)
たとえばフラット・カード、ローラ・カード、練篠フレーム、精梳綿機などの紡績用前処理機において、たとえば綿、合成繊維などの少なくとも一本の繊維スライバ、繊維ウェブなどの繊維材料の質量および/または質量変動を確認する装置
【課題】構造的に簡素な様式で改善された正確な測定を行う。
【解決手段】たとえばフラット・カード、ローラ・カード、練篠フレーム、精梳綿機など
の紡績用前処理機において、たとえば綿、合成繊維などの少なくとも一本の繊維スライバ
、繊維ウェブなどの繊維材料の質量および/または質量変動を確認する装置であって、繊
維材料は触覚要素により機械的に走査され、該触覚要素の偏位は電気信号へと変換される
という装置において、上記触覚要素の位置を検出する非接触式距離センサ(近接センサ)
が配備される。構造および設置に対して簡素な様式にて、改善されて更に正確な繊維束の
測定を促進するために上記距離センサは、光学的または音響的な距離を測定するセンサで
あって電子的評価デバイスに接続されたセンサである。
(もっと読む)
例えばスライバ巻取機において、巻取済ロールを製造するために巻取ローラにリールを供給する装置
【課題】構造面で単純な手段によって、間隙状空間内に迅速且つ信頼性高く空リールを導入するのを可能にする。
【解決手段】スライバ巻取機において、繊維材料の巻取済ロールを製造するために巻取ローラにリールを供給する装置であって、空リールが予備に(貯蔵部内に)保持されており、そして巻取られたロールが交換された後、巻取ロールの包絡面によって形成された間隙状空間内にリールが導入され、装置が貯蔵部からリールを導入するために設けられている。構造面で単純な手段によって、間隙状空間内に迅速且つ信頼性高く空リールを導入するのを可能にするために、貯蔵部は、巻取ローラの側方に配置されており、そして間隙状空間のレベルで側方から間隙状空間内に導入されるように、リールがその都度配置されている。
(もっと読む)
スライバガイド手段を備えたコーミング機械
本発明は、互いに並んで配置された複数のコーミングヘッド(K1〜Kx)を備えたコーミング機械(KM)であって、個々のコーミングヘッドにおいて形成されたコーミングされた繊維フリース(V)が、設けられた手段(33,39)を介して1つのスライバ(F1)にまとめられ、プレスローラ対(K)に供給され、次いで搬送テーブル(T)上に排出され、該搬送テーブル(T)上においてスライバ(F1)は、隣接配置されたコーミングヘッドにおいて排出された他のスライバ(F2〜Fx)と一緒に互いに並んで配置され、1つのスライバ複合体(FV)として後続のドラフト装置(D)に供給される形式のものに関する。このような形式のコーミング機械において、従来の解決策を簡単化するため及び搬送テーブルへのスライバの自動的な供給を可能にするために、本発明の構成では、各プレスローラ対(K)と搬送テーブル(T)との間に、プレスローラ対(K)から排出されたスライバ(F1)のためのガイドエレメント(FE)が設けられている。 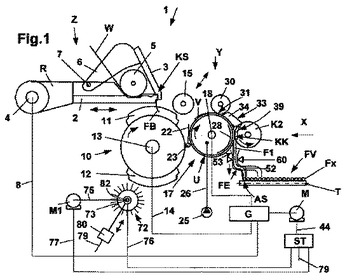 (もっと読む)
(もっと読む)
スライバを形成する装置
本発明は、コーミング機械のコーミング箇所(1)において形成された繊維フリース(V)からスライバ(F1)を形成する装置であって、繊維フリース(V)がローラ対(17,30)のクランプ箇所(31)に供給され、該ローラ対(17,30)は、駆動装置に接続されたローラ(17)と押圧ローラ(30)とから成っていて、搬送方向(F)で見て繊維フリース(V)はクランプ箇所(31)の後ろでまとめられ、ホッパ(39)を介して、駆動装置(G,M)に接続されたプレスローラ対(K)に供給される形式のもの関する。このような形式の装置において、装置を簡単化するため及び誤ったドラフトを回避するために、繊維フリース(V)は、搬送方向(F)で見て、ローラ対(17,30)のクランプ箇所(31)の後ろで、駆動されるローラ(17)の周面(U)の領域において、ホッパ(39)と後続のプレスローラ対(K)とに引き渡され、該プレスローラ対(K)の一方のプレスローラ(K1)が、駆動されるローラ(17)に回動不能にかつ同軸的に配置されている。  (もっと読む)
(もっと読む)
コーマ機のデタッチングローラ用の駆動装置
本発明は、コーマ機のデタッチングローラ(A1,A2)のための間断的な運動を形成する駆動装置であって、該デタッチングローラ(A1,A2)は、駆動手段(Z1,Z2,Z3)を介して、差動歯車装置(1)の駆動シャフト(9)と結合されており、該差動歯車装置(1)の、回動可能に支承された枠体(2)が、一定の回転数で駆動される少なくとも1つの駆動要素(20,Z)を介して駆動され、差動歯車装置(1)は、第2の伝動装置段(G2)を備えており、該第2の伝動装置段(G2)は、出力シャフト(9)に回動不能に取り付けられた太陽歯車(S2)と、前記枠体(2)内でシャフト(33,34,35)を介して回動可能に支承された遊星歯車(U4,U5,U6)とから形成されており、第1の伝動装置段(G1)が設けられており、該第1の伝動装置段(G1)は、遊星歯車(U1,U2,U3)を備えており、該遊星歯車(U1,U2,U3)は、それぞれ第2の伝動装置段(G2)の遊星歯車(U4,U5,U6)に対して同軸に配置されていて、前記シャフト(33,34,35)に回動不能に取り付けられていて、別の太陽歯車(S1)と駆動結合されており、該別の太陽歯車(S1)は、回動可能に支承された駆動シャフト(5)に回動不能に取り付けられており、該駆動シャフト(5)は、駆動ユニット(4,G3)により不均一の回動運動で駆動されるものに関する。及ぼされる回転モーメントを低減しつつデタッチングローラの運動曲線を最適化するために、駆動ユニットは、非円形の歯車(42,43)を備えた伝動装置段(G3)から形成されており、該伝動装置段(G3)は、主駆動装置(HA)の均一の回動運動を不均一の回動運動に変換する。  (もっと読む)
(もっと読む)
紡績用の間隙を備える機械、特に、カーディング機械、ドローフレーム、コーミング機械、あるいは、フライヤ用の測定信号を補正するための装置
【課題】同心度誤差を簡便に短時間で検知して補正できる、装置を提供する。
【解決手段】紡績用の間隙を備える機械、特に、カーディング機械、ドローフレーム、コーミング機械、あるいは、フライヤ用の装置で、少なくとも1つの布地繊維スライバーの厚さに関する測定信号を補正する。信号は検知ロールのペアから得られ、2つの検知ロールの1つは固定され、もう一方は力がかけられて固定された検知ロールから離れるように動くことができ、検知ロールのペアの非真円度又は偏心起因の周期的誤差を検知できる。検知ロールのペアは変位センサに接続され、回転角トランスミッターは電気的システムの入力に信号を送る。電気的システムの出力は補正された測定信号を送る。同心度誤差を検知でき簡便に短時間で補正できるように、可動検知ロールにかけられる圧力により、固定検知ロールと可動検地ロールの円周面が接触し、接触時、これらの検知ロールは回転できる。
(もっと読む)
撚線形態の繊維材料を引き伸ばす練篠機構を有する紡績用前処理機のためのまたは該前処理機における装置
【課題】空間が限られる場合に簡素な手段により間隔センサの配置を可能とし、且つ、検知対象表面に対する間隔センサの優れた結合または協働を可能にする。
【解決手段】装置は、一方のローラは移動不能に配置され且つ他方のローラは該一方のローラから離間移動可能に配置されると共に相互に当接して押圧されるべく配置された一対の測定ローラと、各ローラの内の一方のローラのための保持要素に対して結合された対応表面(検知対象表面)からの間隔を測定する非接触式間隔センサとを有しており、間隔センサ(9、25;47;57、571、572;60)は、他方のローラ(7、8;15、16;42、43)のための保持要素(52、52b、53a、53b)に結合され、且つ、間隔センサ(9、25;47;57、571、572;60)および対応表面(53';59)は、各保持要素(52、52b、53a、53b)の側面であって相互に臨むという側面上に夫々配置される。
(もっと読む)
撚線形態の繊維材料を引き伸ばす練篠機構を有する紡績用前処理機のためのまたは該前処理機における装置
【課題】空間が限られる場合に簡素な手段により間隔センサの配置を可能とし、且つ、検知対象表面に対する間隔センサの優れた結合または協働を可能にする。
【解決手段】装置は、一方のローラは移動不能に配置され且つ他方のローラは該一方のローラから離間移動可能に配置されると共に相互に当接して押圧されるべく配置された一対の測定ローラと、各ローラの内の一方のローラのための保持要素に対して結合された対応表面(検知対象表面)からの間隔を測定する非接触式間隔センサとを有しており、間隔センサ(9、25;47;57、571、572;60)は、ローラ(7、8;15、16;42、43)のための保持要素(52、52b、53a、53b)に対して一体化される。
(もっと読む)
その出口にスライバが排出されて載置される、紡績準備機械、特に練条機またはカードに設けられる装置
【課題】簡単な方法で、載置されているスライバ(スライバパケット)の機械の載置領域からの変位と、設備的な費用の本質的な削減を可能にするために、載置されたスライバは機械的手段によって移動可能であり、そのことが付加的な容器などなしで、載置領域内および/または載置領域からの、スライバの変位をもたらすようにすることを目的とする。
【解決手段】その出口にスライバが排出装置2によって排出されて、土台3上に載置され、その場合に排出装置と土台は互いに対して移動可能である、紡績準備機械、特に練条機またはカードに設けられる装置において、土台3上に載置されたスライバ(スライバパケット)4が後段に接続されている加工機械へ供給可能である。
(もっと読む)
繊維機械の延伸システム、例えば練篠機、カード機、コーマにおいて少なくとも一つの移動する繊維スライバを監視する監視装置
【課題】繊維スライバの破断または停止を短時間で確実に監視することのできる単純な監視装置を提供する。
【解決手段】繊維機械の延伸システム、例えば練篠機、カード機、コーマにおいて少なくとも一つの移動する繊維スライバを監視する監視装置であって、移動する繊維スライバに接触して位置決めされる監視要素を使用しており、少なくとも一つの繊維スライバを延伸システムまで供給する供給装置の近傍または供給装置内に配置されるという監視装置であって、前記繊維スライバ(7、7a〜7f)のための監視要素(12)は、テンションが掛けられた前記繊維スライバ(7、7a〜7f)により偏向されるよう配置された偏向要素(12b、12b1〜12b6)を含んでおり、前記繊維スライバ(7、7a〜7f)のテンションが喪失したときには、前記偏向要素はスイッチ動作を開始する、監視装置が提供される。
(もっと読む)
チョップド繊維束および成形材料の製造方法、成形材料、繊維強化プラスチック
【課題】本発明は、成形材料として用いた場合、良好な含浸性、流動性、成形追従性を有し、繊維強化プラスチックとした場合、優れた力学物性を発現するチョップド繊維束および成形材料の製造方法、ならびにそのチョップド繊維束を用いて得られる成形材料、繊維強化プラスチックを提供せんとするものである。
【解決手段】少なくとも一方のローラーが、該ローラーの回転軸平行方向であり、かつ、該ローラーの周方向に等間隔に配列して取り付けたローラーである一対のローラーの間に、所定の角度で前記繊維束を連続的に供給し、前記ローラーに取り付けた刃と、前記ローラーの他方のローラーの受け部とを接触させて前記繊維束を所定の繊維長に裁断する、チョップド繊維束および成形材料の製造方法、ならびにそのチョップド繊維束を用いて得られる成形材料、繊維強化プラスチックである。
(もっと読む)
コーミング機械上でノイル割合を監視する装置
【課題】異なる作動条件下においてもノイル割合が決定かつ最適化され得るように自動的にコーミング・デバイスを監視する。
【解決手段】異なる動作条件下においてさえも簡素な様式でノイル割合が決定かつ最適化され得る如く上記コーミング・デバイスを自動的に監視するために、ラップの供給量を測定する手段は、ラップ・ロールの重量減少を決定する重量測定デバイス、または、非接触式センサを備え、且つ、コーミング済み繊維材料の量を測定する手段は、コーマ・スライバに対する測定デバイスであって、触覚要素を有する又は非接触式センサを有するという測定デバイスを含む。
(もっと読む)
織物繊維を含む繊維束を繊維分類又は繊維選択するための、特にコーミングするための装置
【課題】生産性の向上及びコーミング済みスライバを改良する装置を提供する。
【解決手段】供給手段によって供給される織物繊維を含む繊維束を繊維分類又は繊維選択するための装置において、繊維束を挟持する挟持デバイスが備えられ、非挟持成分を繊維束の自由端からほぐして摘出するために、コーミング作用を生成する機械的手段が存在し、コーミング済み繊維材料を摘出するために、スライバ形成要素を備える取出し手段が存在し、この取出し手段の下流に牽伸システムがある。生産性の実質的な増加及びコーミング済みスライバの改良をするために、供給手段の下流に、中断なしに急速に回転する第1及び第2の回転可能に装着されるローラが配置され、それに繊維スライバ用の挟持デバイスが備えられ、それが少なくとも1つの前記ローラの周縁の周りに離間して分布し、スライバ形成要素と牽伸システムとの間に少なくとも1つのコンベヤ要素が存在する。
(もっと読む)
紡織繊維を有する繊維束を特にコーミングのために繊維分類または繊維選択する装置
【課題】コーマ・スライバの生産性を大幅に向上させる。
【解決手段】供給デバイス81,82の下流には、回転可能に取り付けられ、中断することなく回転する第1、第2のローラ12,13が設けられている。ローラ12,13には、繊維束の挟持デバイスがそれぞれ設けられている。挟持デバイスは、ローラ12,13の外周の領域に互いに間隔をおいて分布させられている。ローラ13の外周には、コーミングされた繊維材料を除去するための取出しローラ14が配置されている。
(もっと読む)
紡織繊維を有する繊維束を特にコーミングのために繊維分類または繊維選択する装置
【課題】コーマ・スライバの生産性を大幅に向上させる。
【解決手段】供給デバイスの下流には、回転可能に取り付けられ、中断することなく回転する第1、第2のローラが設けられている。ローラには、繊維束の挟持デバイスがそれぞれ設けられている。挟持デバイスは、ローラの外周の領域に互いに間隔をおいて分布させられている。コーミングされた繊維材料を除去するために、スライバファンネルを備える取出しローラが設けられ、スライバファンネルの下流が牽伸システムとなっている。スライバファンネルと牽伸システムの間で、繊維材料は、断面の幅aが高さbよりも大きい繊維構造体17の形態にされる。
(もっと読む)
繊維束をコーミングのために繊維分類もしくは繊維選択する装置
【課題】簡素で生産性を増大し得ると共に優れたコーミング済みスライバを実現し得る装置を提供すること。
【解決手段】供給された織物繊維から成る繊維束をコーミングのために繊維分類もしくは繊維選択する装置が、供給手段(8;10、11)の下流に繊維束(16;301〜303)に対する挟持デバイス(18、19、20;21、22、23)を備え、回転可能に取付けられた少なくとも2つのローラ(12;13)が配置され、挟持デバイスは、各ローラの周縁部の領域において離間されて分布されており、測定された値を処理し得る制御/調整デバイス(42)であって夫々の場合に少なくとも1つの機能を実施すべく接続された要素(30;43〜47;49)に対して電気信号を発し得る制御/調整デバイス(42)には、機械関連値および繊維関連の技術的な値を検出するための測定対象値センサ(29、31、32;34、34a、34b;41)が接続される。
(もっと読む)
紡織繊維を有する繊維束を特にコーミングのために繊維分類または繊維選択する装置
【課題】コーマ・スライバの生産性を大幅に向上させる。
【解決手段】供給デバイスの下流には、回転可能に取り付けられ、中断することなく回転する第1のローラ12および第2のローラが設けられている。ローラ12には、繊維束16の挟持デバイスが設けられている。挟持デバイスは、上側ニッパ19と下側ニッパ20を有し、ローラ12の外周の領域に互いに間隔をおいて分布させられている。上側ニッパ19は板ばねの形態である。
(もっと読む)
織物繊維から成る繊維束を特にコーミングのために繊維分類もしくは繊維選択する装置
【課題】時間当たりに生産される量(生産性)を相当に増大し得ると共に、更に大きな製造速度にて確実な取出しおよび継ぎ合わせを可能とする。
【解決手段】時間当たりに製造される量(生産性)を簡素な様式で相当に増大し得ると共に、更に大きな製造速度にて確実な取出しおよび継ぎ合わせを許容すべく、上記供給手段の下流には、回転されて搬送される繊維束に対する挟持デバイスを備えると共に回転可能に取付けられた少なくともひとつのローラが配置され、上記挟持デバイスは、上記ローラの周縁部の回りにおいて離間されて分布され、且つ、上記ローラに対してはコーミング作用を生成する手段(コーミング要素)が組み合わされ、周回手段によるコーミング済み繊維束の自由領域の取り込みの後で、上記コーミング済み繊維束の挟持端の挟持は終結される。
(もっと読む)
1 - 20 / 39
[ Back to top ]