
Fターム[3C001KA05]の内容
Fターム[3C001KA05]に分類される特許
1 - 20 / 125
研削盤の制御装置および制御方法
【課題】簡便にワークの膨張量を求めることができて、その膨張量に基づいて研削目標値を補正することにより、加工寸法のばらつきを低減できるようにした研削盤の制御装置を提供する。
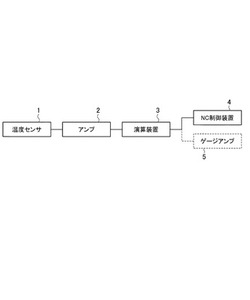
【解決手段】循環使用する研削液を研削箇所に供給しながら研削目標値となるように順次ワークを研削する研削盤の制御装置であって、各ワークの研削工程ごとに循環使用する研削液の温度を定点測定する温度センサ1と、温度センサの測定した研削液温に変化があった場合にその変化量に基づいて研削目標値の補正値を演算し、その補正値に基づいて研削盤の研削目標値を補正する演算装置3と、を備える。
(もっと読む)
工作機械、制御装置、プログラム及び工作機械による加工方法

【課題】暖気運転の時間をなくすか短縮することができる工作機械、制御装置、プログラム及び工作機械による加工方法を提供する。
【解決手段】工作機械1は、ワークWを把持する主軸71を回転可能に支持する主軸台72が載置され、X軸方向に移動する第2X軸スライド部91と、工具Trを保持する工具台100と、X軸方向には移動しないドグと、第2X軸スライド部91に対して不動である検出部と、制御部300と、を備える。制御部300は、検出部の検出に基づき検出時の第2X軸スライド部91のX軸座標を取得し、第1の検出時のX座標と第1の検出時後の第2の検出時のX座標との差をX軸方向における熱変位量として算出し、熱変位量に応じて補正量を取得し、工具の目標位置に補正量を加味した位置に第2X軸スライド部91を移動させる。
(もっと読む)
誤差補正部を備えた数値制御装置
【課題】誤差補正部を備えた数値制御装置。
【解決手段】ヘッド側合成リンクベクトルVLh,テーブル側合成リンクベクトルVLt,ヘッド側合成誤差リンクベクトルVLh’およびテーブル側合成誤差リンクベクトルVLt’の関係と補正量Δ3DとヘッドおよびZ軸コラムとの関係から、補正量Δ3Dの補正を行うことによって、工具先端点をヘッド側合成誤差リンクベクトルの先端(VLh’の先端)からテーブル側合成誤差リンクベクトルの先端(VLt’の先端)に移動し、各リンクベクトルVh,Vx,Vy,Vz,Vc,Va,Vtに伸縮誤差、並進誤差または回転誤差があっても実際の工具先端点は実際のワーク上の正しい加工位置に移動し、ワークに対する正しい加工が行われる。
(もっと読む)
工作機械用制御装置
【課題】工作機械で生じる熱変位量を算出処理する処理負担を軽減するとともに処理速度の低下を回避し、しかもワークの加工精度向上を実現する工作機械用制御装置を提供すること。
【解決手段】逐次解析制御部110、事前解析制御部120、補正値算出部130、変化量算出部140及びモード切換部150を備え、工作機械Mの構成部分に発生する熱変位量に基づいて補正された加工プログラムを実行して工作機械Mを動作させ、ワークWに対する高精度な加工を実現する工作機械用制御装置100。
(もっと読む)
数値制御装置および加工方法
【課題】工作機械において工作物を高精度に加工でき、且つ加工時間を大幅に短縮できるNC装置および加工方法を提供する。
【解決手段】主軸7の回転速度Sと熱変位量Tとの関係を示すデータを予め測定して記憶している。これにより、工具73と工作物Wとの接触点Pnにおける主軸7の熱変位量Tnおよび基準熱変位量T0を求め、接触点Pnにおける加工誤差Tn0を求めることができる(ステップS1〜4)。そして、該加工誤差Tn0が工作物の許容誤差An内となるように、主軸7の回転速度Sn,SSnを決定し、NCプログラムに指令されている主軸7の回転基準速度S0およびテーブル3の送り基準速度F0を変更することができる(ステップS5〜9)。そして、以上の処理を同一の工具73による加工工程(一加工工程)内において加工部位ごとに行っているので、工作物の加工精度を高精度に維持しつつ、加工時間を従来よりも大幅に短縮することができる。
(もっと読む)
工作機械の数値制御装置
【課題】効率的な空間補正を可能にすることにより、従来と比較して高精度に位置決め誤差を補正する工作機械の数値制御装置を提供することを目的とする。
【解決手段】数値制御装置1は、可動領域Taを格子状に分割した複数の単位格子Sを記憶する単位格子記憶手段11と、格子点Pgにおける位置決め誤差の補正データを格子点Pgに関連付けて記憶する補正データ記憶手段12と、1または複数の単位格子Sにより形成される移動領域Tmを取得する移動領域取得手段13と、移動領域Tmに含まれる格子点Pgと補正データ記憶手段12に記憶される補正データとに基づいて、NCデータの指令位置に対する補正値を算出する補正値算出手段14と、NCデータと補正値とに基づいて駆動軸を制御する制御手段21と、を備える。
(もっと読む)
工作機械
【課題】 工具支持体の基準部と工具の先端との間の距離を計測することができて、加工寸法精度向上が可能な工作機械を提供する。
【解決手段】 主軸6等のワーク支持体と、刃物台7等の工具支持体とを備え、両者を相対移動させて切削加工を行う工作機械に適用される。前記相対移動の方向(X軸方向)に沿う刃物台7の基準部7sと工具先端18t間の距離L3を計測する刃先・基準部間計測手段61を設ける。刃先・基準部間計測手段61は、例えば、前記基準部7sと工具先端18tとを同時撮影可能な撮像装置62と、この撮像装置64で同時撮影された画像を処理して前記距離L3を演算する画像処理手段63とでなる。撮像装置62は、前記基準部7sと工具先端18tとを別々に検出する2台としても、あるいは1台で移動させて検出するようにしても良い。
(もっと読む)
ワイヤ放電加工機、ヘッド制御方法、及びそのプログラム
【課題】ワイヤ放電加工機の上下ヘッドの相対位置ずれを、簡易的な構成と処理で正確に補正を行う。
【解決手段】本体及び被加工物搭載用のX−Yテーブルが前面側から見て略左右対称に設計され、背面側から前面側に延出するコラムを有しており、コラムの先端部周辺に配設されたコラム前温度センサからの温度情報を入力する温度情報入力部41と、ヘッドの位置ずれが生じていないときの基準温度情報を記憶する基準温度記憶部46と、入力された温度情報及び基準温度情報の差分を演算する温度差演算部42と、コラムの材質における線膨張係数と、その延出部分の長さから得られる補正係数を記憶する補正係数記憶部45と、演算した温度変化及び補正係数に基づいて、上下ヘッドの相対的なずれ量を演算するずれ量演算部43と、演算されたずれ量に基づいて、前記ヘッド駆動軸を制御してV方向の位置ずれを補正するヘッド駆動軸補正部44とを備える。
(もっと読む)
熱変位補正装置および熱変位補正方法
【課題】より高精度にワーク自身の熱変位補正を行うことができる熱変位補正装置および熱変位補正方法を提供する。
【解決手段】ワークWの温度を実際に変化させた時にワークWの基準点P1に対するワークWの所定点P2〜P7の熱変位方向θ2〜θ7を予め測定しておき、測定した熱変位方向θ2〜θ7をデータベース32に記憶しておく。データベース32に記憶されているワークWの所定点P2〜P7の熱変位方向θ2〜θ7、ワークWの温度Tw、および、ワークWの線膨張係数に基づいて、加工時におけるワークWの所定点P2〜P7の熱変位補正位置Ob2〜Ob7を算出する。そして、ワークWの所定点P2〜P7を工具5により加工する際に、熱変位補正位置Ob2〜Ob7に基づいてワークWの基準点P1に対する工具5の相対位置を補正する。
(もっと読む)
主軸装置
【課題】中繰り主軸の熱変位量を、応答性良く、より正確に把握し、より高い加工精度を得ることができる主軸装置を提供する。
【解決手段】中繰り主軸16と主軸サポート17と制御装置32とを有し、主軸サポート17の後端部の軸方向(Z軸方向)の熱変位量を測定する熱変位センサ30を設け、制御装置32は、熱変位センサ30により測定された熱変位量δBを用いて、主軸先端16aの熱変位量δAを求め、その機械座標位置を補正する。
(もっと読む)
工作機械の熱変位補正装置及び方法
【課題】仕様の数が多くても設定や運用を正確且つ簡易に行うことができる工作機械の熱変位補正装置あるいは方法を提供する。
【解決手段】スケール2の有無やベッド1・テーブル5の長さの割り出し方式が相違することによって互いに異なる2つの仕様が存在する工作機械にあって、各仕様における当該工作機械の熱変位補正量を推定する補正量推定装置13・パラメータ自動選択装置14を備えており、補正量推定装置13・パラメータ自動選択装置14は、ベッド1・スケール2・テーブル5・ワーク6にそれぞれ対応する推定熱変位演算用のパラメータの集合をデータベースとして記憶すると共に、各仕様に応じた機械情報に基づいて前記データベースから前記仕様に属する前記パラメータを選択し、選択された前記パラメータによりベッド1・テーブル5・ワーク6あるいは更にスケール2における推定熱変位を演算し、当該推定熱変位を合算する。
(もっと読む)
工具の位置を決定する方法
【課題】工作機械において、熱的変位の影響を受けないで工作物に対する工具の位置を正確に求める。
【解決手段】工作機械(10)が機械制御装置(26)を介すると共に関連の測定システム(26a)を介して座標系(27)において工作物ホルダ(12)に対して動くことができる主軸(24)及び工具貯蔵空間(30,38)を備えた工具マガジン(31)を有し、主軸(24)は使用済み工具(25)が新たな工具(32)と交換される工具交換位置に動かされる。主軸が工具交換と関連して測定位置(50)を占めたかどうかを指示する別個の測定システム(43,46)が設けられ、測定位置では座標系原点に対する主軸の位置が機械制御装置及び関連測定システムにより求められ、それにより少なくとも1つの補正値(Δy,Δx)が求められる。
(もっと読む)
機械の精度を高めるための方法
【課題】大型機械、特に15フィートを超える作業範囲を有する大型機械は、熱膨張および軸間の機械的な心合わせのずれによる、受入れ難い誤差を生じる。これらの誤差は、機械を熱筐体内に封入すること、注意深く較正すること、または、各軸上にレーザ干渉計を装着することによって、伝統的に最小に抑えられてきている。これらの解決策はコストが高くつき、頻繁な再較正を必要とし、かつ、摩耗等による1つの軸の別の軸に対する小さな回転を補正することはできない。
【解決手段】干渉計レーザトラッカまたは匹敵する3D位置センサを使用して、機械が休止状態となった際に、機械のヘッド等のエンドエフェクタに取付けられた再帰反射器の位置を測定する。コンピュータがその測定された位置を機械媒体に従った所望の位置と比較して、小出し供給される媒体命令文で適切な訂正を加えて、機械をさらなる機械加工に先立って正しい位置へと移動させる。
(もっと読む)
工作機械の熱変位補正方法及び熱変位補正装置
【課題】送り軸の各位置における熱変位の分布を推定し、更に、位置検出センサを用いて送り軸の位置を検出し、検出した位置に基づいて送り軸の位置指令に対する補正量を増減することにより、周囲環境の温度変化など機械の動作によらない熱変位も考慮して補正することができる工作機械の熱変位補正方法及び熱変位補正装置を提供すること。
【解決手段】送り軸の位置を検出しメモリに格納する(SA01)。検出した位置に対応する区間(I)の、修正後の送り軸部熱変位量(LnI’)をメモリから読み出す(SA02)。修正後の送り軸部熱変位量(LnI’)を打ち消す量を熱変位補正量とし、補正手段に送る(SA03)。補正処理を行い、処理を終了する(SA04)。
(もっと読む)
工具研削盤における熱変位補正方法、工具研削盤、NCプログラム
【課題】設備コストがかからない簡単な構成で熱変位補正を可能とする。
【解決手段】S1で暖機運転を行い(第1の暖機運転ステップ)、S3で各基準点の座標値を測定する(第2の基準点測定ステップ)。S5で、測定された座標値と前日の座標値とを比較して両者の差を算出し、S6で算出した差が許容値内にあるか否かを判別する(第1の判別ステップ)。ここで差が許容値内になければ、N回に達するまで暖機運転を繰り返し(第2の暖機運転ステップ)。暖機運転がN回に達すると、S3で再び各基準点の座標値を測定して(第3の基準点測定ステップ)、S5,6で前日の座標値との差が許容値内にあるか否かを判別する(第2の判別ステップ)。ここで許容値内になければ、暖機運転をN回繰り返しても座標値の差が許容値内にならなかったとして、S11で、差に基づいてワーク座標原点を補正し(補正ステップ)、補正したNCプログラムで加工を行う。
(もっと読む)
工作機械の熱変位補正システム
【課題】コラム前面を基準位置として熱変位量を評価し、且つ、テーブルの熱変位量が不均一であっても精度のよい熱変位補正を行うことなどが可能な工作機械の熱変位補正システムを提供する。
【解決手段】例えば、位置検出器温度センサ41−6と、テーブル温度センサ41−1〜41−5と、温度データa6を入力する温度データ入力部、温度データa6に基づいて位置検出器の熱変位量を算出する熱変位量算出部、温度データa1〜a5を入力する温度データ入力部、温度データa1〜a5に基づいてX軸方向の温度分布に応じたテーブルの熱変位量を算出する熱変位量算出部、前記位置検出器の熱変位量と前記テーブルの熱変位量とに基づいてコラム前面を基準位置としたテーブル系統の熱変位量を算出する熱変位量算出部、前記テーブル系統の熱変位量に基づいてX軸の補正量を出力するX軸補正量出力部を有する変位補正装置とを備えた構成とする。
(もっと読む)
工作機械の変位評価方法
【課題】短時間で容易に機械の変位評価を実施することができ、且つ、アナログ量で機械の変位量を把握することができる工作機械の変位評価方法を提供する。
【解決手段】互いに直交するX,Y,Z軸を有する工作機械に対し、例えば、溝加工面61bを有する変位評価用ワーク61を、溝加工面61bがX軸方向に対して傾斜し、且つ、溝加工面61bの一端側の辺61b−1がY軸方向に対して平行な状態となるように設置し、この状態で、工具62をZ軸方向には移動させずにX軸方向に移動させることによって溝加工面61bに直線状の溝63を形成する溝加工を実施し、且つ、この溝加工を、工具62をY軸方向へ順次移動させるごとに実施して各列の直線状の溝63が互いに平行となるようにすることにより、Z軸方向の変位を評価する。
(もっと読む)
工作機械の熱変位補正方法及び工作機械
【課題】センサや高機能な演算装置を不要とすることで、工作機械の稼働停止期間を短時間とし、稼働時間や熱変位が変更された場合であっても、最適な補正を行い、常に高い工作精度を保つことを可能とする熱変位補正手段を備えた工作機械及び制御方法を提供することにある。
【解決手段】
マシニングセンタ1の熱変位補正方法は、マシニングセンタ1の稼働時に生じる熱変位の時間に対する変化を予め測定してデータテーブル25を作成する第1のステップと、このデータテーブル25をPLC演算部24に記憶する第2のステップと、マシニングセンタ1の稼働時間とデータテーブル25とに基づいて現在の熱変位を導き出す第3のステップと、現在の熱変位に基づいて加工制御の補正値を演算する第4のステップと、を実行することにある。
(もっと読む)
工作機械
【課題】ランニングコスト及びイニシャルコストを抑えつつ、コラムの各部分の熱膨張差によるコラムの傾きを抑える。
【解決手段】上下のそれぞれの端が開口し、工具ヘッドを間接的に支持する筒状のコラム10と、コラム10の下方開口23の縁と設置面Fとの間に配置され、コラム10を持ち上げて支持する複数の脚31と、コラム10の下方開口22から雰囲気空気をコラム内に取り入れ、上方開口13から雰囲気空気を排気させるファンユニット40と、を備えている。
(もっと読む)
切削加工方法及び装置
【課題】切削加工の加工精度向上には、主軸の回転精度やテーブルの位置決め精度といった様々な要因の検討が必要であるが、本発明では、切削熱に起因する被削材の熱変形による切削加工精度の悪化を防止し、加工精度および加工能率の向上を図ることを目的とする。
【解決手段】工具および被削材の一方または両方の回転運動と工具および被削材の相対運動を利用して被削材を所定の形状に除去加工する切削加工方法又は装置において、当該被削材に対する工具の経路又は切込み等の切削条件を切削加工中の当該被削材の熱変形量に応じて補正する工程又は手段を有することを特徴とする。
(もっと読む)
1 - 20 / 125
[ Back to top ]