
Fターム[3C007AS00]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903)
Fターム[3C007AS00]の下位に属するFターム
搬送、移載、物品供給、取出 (637)
組立 (282)
微小体操作(例;細胞処理) (73)
溶接、溶断 (253)
機械加工(例;研磨、切削) (95)
塗装、シーリング (83)
検査、点検、測定 (74)
清掃 (46)
土木、建築用 (16)
農林水産業用(例;果実採取) (10)
自動車製造用 (107)
半導体、ディスク製造用 (342)
クリーンルーム用 (28)
高所工事用(例;電線工事用) (9)
原子炉用、蒸気発生器用 (35)
水中用 (9)
宇宙用、航空用 (15)
高温/低温環境用 (7)
高圧/真空環境用 (44)
災害用(例;消火、火災予防、災害救助) (33)
特殊ガス雰囲気用 (5)
サービス用 (240)
医療用 (226)
エンタテインメント用 (219)
Fターム[3C007AS00]に分類される特許
1 - 15 / 15
パワーアシスト装置
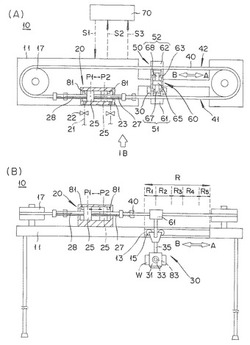
【課題】小型化および製造コストの低減が図られたパワーアシスト装置を提供する。
【解決手段】パワーアシスト装置10の制御部70は、クランプ部50による伝達部材40のクランプまたはアンクランプを切り替えることによって、ピストン25の移動を、搬送部材40を移動するためのアシスト力または搬送部材を制動するためのアシスト力に変換し、搬送経路Rに沿ってワークWを搬送させる搬送作業を円滑に行うことを可能にする。
(もっと読む)
装着型動作支援装置

【課題】腰部フレームと、腰部フレームの上部に接続されて装着者の肩に係留される背部フレームと、腰部フレームの下部に接続されて装着者の下肢に係留される下肢フレームとを備えた身体装着型動作支援装置であって、装着者の歩行時に装着者の骨盤の揺動に起因する背部フレームの揺れを抑制することを目的とする。
【解決手段】装着型動作支援装置10に、装着者の左右方向に長尺な基部31を有する腰部フレーム30と、腰部フレーム30の下部に接続される左右一対の下肢フレーム50,50と、腰部フレーム30の基部31の上部に接続される背部フレーム40と、背部フレーム40と腰部フレーム30の基部31とを接続する接続部70とを備える。接続部70は、前額面上の1自由度の回転機構であって、例えば、四節リンク機構で構成される。
(もっと読む)
長尺材曲げ加工用のロボットハンドおよび長尺材曲げ加工システム
【課題】吸着手段とグリッパとを備えたローディングが可能な長尺材用ロボットハンドの提供と、このロボットハンドを使用した長尺板材曲げ加工システムの提供。
【解決手段】1.ロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、前記吸着手段をワークの前後方向に移動位置決め可能に設けたことを特徴とする長尺板材曲げ加工用ロボットハンド。2.板材折曲げ加工機へワークを供給するロボットと、掴み換え装置とを備えた長尺板材曲げ加工システムにおいて、前記ロボットハンドがロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、吸着手段をワークの前後方向に移動位置決め可能に設けてなるこ長尺板材曲げ加工システム。
(もっと読む)
玉掛けロボット及びこれを用いた玉掛けシステム
【課題】不正確な玉掛けを解消して、正確に玉掛けを実施することができる玉掛けロボット及びこれを用いた玉掛けシステムを提供すること。
【解決手段】玉掛けシステム1は、多関節ロボット20bと、多関節ロボット20bのアームに取り付けられるロボットハンド30であって、鋼材玉掛用の吊ワイヤを把持又は解放するロボットハンド30と、吊ワイヤに取り付けられた反射テープ14cを照明する照明機器18aと、所定の検出感度に設定され反射テープを検出しカメラ映像として出力するCCDカメラ18bと、そのカメラ映像に基づいて反射テープの位置を求める画像処理雄値18と、反射テープの位置に基づいて吊ワイヤを把持させる把持命令をロボットハンド30に送信して当該ロボットハンド30を制御する玉掛けロボット制御装置16とを備える。
(もっと読む)
投影面情報提示装置と方法
【課題】ロボットハンドと対象物との相対位置誤差を拡大表示することができ、これにより目視かつ手動操作によりロボットハンドを対象物に対して正確に位置決めすることができる投影面情報提示装置と方法を提供する。
【解決手段】 ロボットハンド12に設けられたプロジェクタ22により、原パターンAを対象物2に固定された投射面3上に投射し(S1)、ロボットハンド12に設けられたカメラ24により、投射された原パターンである投射パターンBを撮影し(S2)、撮影した投射パターンである撮影パターンCを、ロボットハンド12が対象物2に対し予め設定した位置と姿勢をとる基準位置において、原パターンAと一致するように変形し(S3)、変形した変形パターンDを原パターンAに重畳する(S5)。(S1)〜(S5)を順に繰り返す。
(もっと読む)
ワーク搬出入装置及び乾燥処理装置
【課題】ワークの搬出入を容易に行うことのできるワーク搬出入装置及び乾燥処理装置を提供する。
【解決手段】操作部4と、荷重バランサー装置5と、を有し、操作部4は、エアレギュレータが搭載された箱体状の操作本体6と、操作本体6の前面側に設けられた長尺な棒状のアーム部材7と、固定機構8と、一対の把持部材10とを有している。アーム部材7は、ワーク3の内周面に挿入されることで、ワーク3を保持可能であって、その保持されたワーク3を軸方向に沿ってスライド可能に構成されている。
(もっと読む)
信号送受信装置
【課題】安価かつ簡易な構成で、安定した動作を可能とする歩行補助装置用の信号送受信装置を提供する。
【解決手段】本発明は、歩行補助装置を制御するために、信号を送受信する信号送受信装置であって、人体に接触可能な送信電極と、前記送信電極が前記人体に接触された場合に信号を送信する信号送信手段と、を有する送信部と、前記人体に接触可能な受信電極と、前記信号送信手段から送信された前記信号が前記受信電極を介して受信される信号受信手段と、を有する受信部と、を備え、前記送信電極と前記信号送信手段とは、所定距離以上離れていることを特徴とする。
(もっと読む)
動作支援システム
【課題】装着型動作支援装置に対するユーザの不安感を軽減する。
【解決手段】動作支援システム100は、ユーザの関節にトルクを与えてユーザの動作を補助する脚装具12と、脚装具12の動作を規定するパラメータを指定するための入力デバイス50と、入力されたパラメータに基づく装着型動作支援装置の動作を表すシミュレーション画像を表示する表示デバイス50を備える。動作支援システム100は、脚装具12を実際に動作させるのに先立って、その動作のシミュレーション画像をユーザに提供することができる。ユーザは、脚装具12を実際に動かす前に、その動きを画像によって知ることができる。
(もっと読む)
装着式動作補助装置及びその制御方法
【課題】本発明は生体信号の検出感度に応じたパラメータに補正することを課題とする。
【解決手段】動作補助装置10のキャリブレーション制御手段162は、装着者12が動作補助装着具を装着したときに、負荷発生手段164により電力増幅手段158に対して駆動源140からの駆動力を負荷(入力トルク)として装着者12に付与させる。そして、駆動源140からの駆動力を付与された装着者12は、予め決められた所定キャリブレーション動作を行って骨格筋から力を発生させる。これにより、上記キャリブレーション動作に伴って物理現象検出手段142が関節角度を検出し、生体信号検出手段144が筋電位信号を検出する。パラメータ補正手段156では、フェーズ特定手段152によって特定されたフェーズにおける差分導出手段154によって算出された負荷(入力トルク)と駆動力(筋力)との差に基づいてパラメータKを補正する。
(もっと読む)
ローラツールの着脱機構
【課題】ローラが用いられて行われる作業の自動化を図るための構成において、ローラの交換を簡易的に行うことができ、高い汎用性を得ることができるローラツールの着脱機構を提供する。
【解決手段】ツール本体11にローラ12を支持するローラツール10は、交換台30に対する着座面となる突部下面21と、突部下面21とは反対側を向く面である突部上面22とを有し、交換台30は、突部下面21が接触する面である座面41と、座面41に対向する面である天井面42とを有し、交換台30に着座した状態のローラツール10が、所定の支持機構との関係における近接移動を、座面41による支持によって受けることで、ローラツール10の支持機構に対する取付けが行われ、交換台30に着座した状態のローラツール10の、支持機構との関係における離間移動が、天井面42によって規制されることで、ローラツール10の支持機構からの取外しが行われる。
(もっと読む)
燃料注入システム
【課題】簡素な構造で、燃料パイプに燃料を注入でき、かつ、燃料キャップを締め付けできる燃料注入システムを提供すること。
【解決手段】燃料注入システム1は、注入ガンと、先端フランジ面21が回転可能なロボットアーム20と、ロボットアーム20の先端フランジ面21に取り付けられた把持装置30と、これらを制御する制御装置40と、を備える。制御装置40は、注入ガンを把持装置30で把持して、注入ガンの吐出口を燃料パイプ53の先端に差し込んで燃料を注入するガソリン注入手段41と、注入ガンを燃料パイプ53から離して、把持装置30で燃料キャップを把持して、燃料キャップを燃料パイプ53の先端に当接させて、先端フランジ面21を回転させることにより、燃料パイプ53の先端に燃料キャップを締め付けるキャップ締め付け手段42と、を備える。
(もっと読む)
ロボットハンド及びそれを備えたロボット
【課題】仮組みが必要な部品の組立作業に使用されるロボットにおいて、第2の部品を第1の部品に対して仮組みできるハンドの構造を開示し、第2の部品を仮組みした後、第2の部品を仮組みしたロボットのハンドが他の作業に使用できるようにする。
【解決手段】ロボットハンドが、ロボットのアーム先端22に固定され、把持動作が可能な一対の把持部材を備えた第1のハンド21と、第1のハンド21によって把持されたときに保持ツメ16を閉じることができる第2のハンド10と、から構成され、第2の部品の穴と第1の部品の穴に挿入された第2のハンド10が、第1のハンド21によって離されたとき、保持ツメ16が付勢手段13によって開き、第2の部品が第1の部品に対して係止されるよう構成した。
(もっと読む)
加工装置
【課題】加工装置1において、誤った部位に加工が施される虞を低減することにある。
【解決手段】加工装置1は、ワーク2を把持して加工位置へ移送する移送部4と、移送部4に一体的に組み込まれ、ワーク2の像を映す映出部と、映出部を介してワーク2を撮像する撮像部5と、撮像部5により得られた画像に基づき、移送部4によるワーク2の把持状態の修正を指令する制御部6とを備える。これにより、加工装置1は、ワーク2を把持した後に、ワーク2の把持状態の修正に用いる画像および画像データを取得する。このため、画像データを取得した後に、ワーク2に対して作業者による誤作業が行われる虞が極めて低くなる。また、移送部4と一体に組み込まれた映出部により像を映し出すことで、加工装置1は、ワーク2の把持状態を高精度に把握することができる。以上により、ワーク2に対し誤った側面にマーキングが施される虞を低減することができる。
(もっと読む)
移動ロボット、プログラム及びロボット制御方法
【課題】利用者を監視する能力を運用中に自動的に向上させることができる移動ロボット、プログラム及びロボット制御方法を提供する。
【解決手段】利用者2が存在する位置を示す利用者位置情報に基づいて利用者2が移動可能な空間を記述した利用者移動可能空間情報を生成し、生成された利用者移動可能空間情報に基づいて利用者2との位置関係を制御する。これにより、利用者2が移動可能な空間を記述した利用者移動可能空間情報をロボット運用中に自動的に生成することで、利用者を監視する能力を運用中に自動的に向上させることができる。
(もっと読む)
アーク溶接ロボット
【課題】溶接した部材の目視検査により溶接品質管理には限界があり、また汎用計測器を使用した溶接品質管理でも十分なデータ収集ができず、またコスト増加となる。
【解決手段】本発明のアーク溶接ロボットは、予め教示された動作プログラムによって所定の動作パターンで動作し、前記動作パターンに応じて所定の溶接条件で被溶接物を溶接するアーク溶接ロボットであって、前記動作プログラム実行時のプログラム名、溶接箇所、計測データのうち少なくとも1つを履歴情報として保存する保存手段を備えることにより、特別な計測器を付加することなく溶接品質管理に必要な溶接に関するデータを安価にかつ高精度に収集することができる。
(もっと読む)
1 - 15 / 15
[ Back to top ]