
Fターム[3C007AS06]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 組立 (282)
Fターム[3C007AS06]の下位に属するFターム
Fターム[3C007AS06]に分類される特許
1 - 20 / 138
自動作業装置
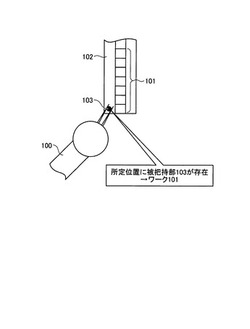
【課題】ワークの種別を自動的に判別する自動作業装置のコストを抑えること。
【解決手段】ワークを把持したか否かを検知するセンサを備えたロボットハンドへ作業対象となるワークを供給する供給容器に、ワークの種別を示す被把持部を予め設けておき、作業の開始前に、ロボットハンドによって供給容器の被把持部を把持させる模擬動作を行い、ロボットハンドによる被把持部の把持位置および把持結果に基づいてワークの種別を判別するように自動作業装置を構成する。
(もっと読む)
ロボット制御装置、ロボット制御方法、およびプログラム

【課題】曖昧な命令をロボットに入力しても、ロボットに動作を行わせることができず汎用性のあるロボット制御装置、ロボット制御方法、およびプログラムを提供すること。
【解決手段】シナリオとサブシナリオとが対応付けられて登録されているデータベース103と、入力装置62から入力された命令を取得する命令取得部101と、命令取得部が取得した命令に対応するサブシナリオをデータベースから読み出して、サブシナリオに基づいてロボット1を制御する制御コマンドを生成する制御コマンド生成部104とを備え、制御コマンド生成部は、命令取得部が取得した命令を実行するのに必要な要素に未取得の要素がある場合、ロボットに未取得の要素を取得させる命令を抽出してロボットに送信し、ロボットが取得した要素をサブシナリオに組み込んでロボットを制御する制御コマンドを生成する。
(もっと読む)
作業システム
【課題】作業システムの設備コストを抑えること。
【解決手段】作業システム1は、作業対象であるワークに対して所定の作業を行うロボット12と、ワークに対する所定の作業が行われる場所である複数の作業ステーション13a〜13dとを備える。そして、ロボット12は、作業ステーション13b,13cにおいてワークに対して圧入作業やネジ締め作業といった所定の作業を行うだけでなく、作業ステーション13a〜13d間でのワークの搬送も併せて行う。
(もっと読む)
ロボット装置、位置検出装置、位置検出プログラム、および位置検出方法
【課題】ターゲットのサブピクセルレベルでの位置検出を高精度に行う。
【解決手段】ロボット装置1は、ターゲットを搬送可能に保持する多関節ロボット10と、ゴール位置とターゲットとを撮像する撮像装置20と、画像上のゴール位置にピクセルレベルで位置合わせされたターゲットをサブピクセルレベルの変位量で変位させたときの画素値の変化量により表される感度に応じて、ターゲットが配置された状態のゴール画像データを記憶するゴール画像記憶部と、撮像装置20から得られるターゲットを含む画像データとゴール画像記憶部に記憶されたゴール画像データとの比較に基づいてターゲットの一致度評価値を計算し、この一致度評価値に基づいてゴール位置に対するターゲットの位置ずれを検出するターゲット検出部と、この位置ずれをなくす方向にターゲットを搬送するよう多関節ロボット10を制御するロボット制御装置50とを備えた。
(もっと読む)
ロボット、ロボット制御装置、ロボット制御方法、およびロボット制御プログラム
【課題】汎用性の高いねじ締めを行えるロボット、ロボット制御装置、ロボット制御方法、ロボット制御プログラムを提供する。
【解決手段】ドライバービット51の先端の係合部52が磁化されているドライバー50を把持するアーム部20と、アーム部20を制御する制御部100とを備え、制御部100は、ドライバー50の係合部52を磁力により係合可能な頭部を有するねじ211の頭部頂面の溝に押しつけた状態で、ドライバー50の係合部52にねじ211の頭部頂面の溝が嵌合した状態で磁力により生じる吸着力よりも小さく、ドライバーの係合部52にねじ211の頭部頂面の溝が当接した状態で磁力により生じる吸着力よりも大きい慣性力がねじ211に作用する第1の所定の加速度で、ねじ211が吸着されたドライバー50を移動させる。
(もっと読む)
探索装置、自動組付け装置、探索方法、およびプログラム
【課題】部品のワークへの組付け位置を精度よく探索できる探索装置を提供する。
【解決手段】ワークは、バカ穴とバカ穴の底面に形成されたネジ穴とを有する。探索装置は、ネジと底面とを接触させた状態で、u軸方向の正および負の向きと、v軸方向の正および負の向きとに、ネジを移動させる。探索装置は、u軸方向の正および負の向きと、v軸方向の正および負の向きとに、ネジを各々移動させたときに反力が閾値Th1以上となる位置Pα,Pβ,Pγ,Pδを特定する。探索装置は、位置Pαと位置Pβとの間の距離が閾値Th2未満の場合には、位置Pαと位置Pβとの中間位置を起点としたv軸方向への移動と、位置Pγおよび位置Pδの特定とを実行する。探索装置は、位置Pγと位置Pδとの間の距離が閾値Th2未満の場合には、位置Pγと位置Pδとの中間位置をネジの組付け位置と判断する。
(もっと読む)
作業の良否判定システム及び良否判定方法
【課題】ロボット1等の機械装置においてワークの保持部近傍の大型化やケーブル数の増加を抑制するとともに、センサ等の故障を防止する。
【解決手段】ロボット1等の機械装置におけるワークの保持部(例えばチャック8)と、その支持部(例えば手首部6)との間に可動部(例えばコンプライアンス装置7)を設け、作業に伴う保持部及び支持部の位置の変化からその良否を判定する。例えば、可動部の保持部側及び支持部側の部材に夫々マーカーMを設けて、カメラ11により撮影した画像中のマーカー位置を画像処理により検出し、保持部及び支持部の間隔の変化から作業の良否を判定する。
(もっと読む)
車体のドア開け方法及び装置
【課題】ロボットの設置箇所を小さくすると共に、サイクルタイムの短縮を図ることが可能な、ドア開け方法及び装置を提供すること。
【解決手段】双腕ロボットにおいては、2つのアームがS1軸及びS2軸の各々によって回動される。その結果、S1軸を用いた回動により、ドア開き動作(ステップST2)が実現される。そして、S1軸とS2軸とを用いた回動により、ボルト緩め動作を行うための、ドア91のインナ側に入り込む移動(ステップST3)が実現される。この場合の移動は、ドア91の方向を向くような移動である。その結果、ドア把持位置まで移動したとき(ステップS26)、双腕ロボットは、ボルト緩め動作を行い易い姿勢となっている。
(もっと読む)
サスペンションアッセンブリ取り付け方法
【課題】サスペンションアッセンブリを車両ボディに接近させていく過程でダンパーが車両ボディ側と干渉する場合でも、外部センシング機器を用いずに、その干渉を回避してサスペンションアッセンブリを車両に取り付けることのできるサスペンションアッセンブリ取り付け方法を提供すること。
【解決手段】サス整列・搭載ロボット4の上昇と同期させて、下廻り締付・ダンパー挿入ロボット5によりダンパーの位置を必要に応じて変更することで、ボディに対するダンパーの干渉を回避する。所定の高さに到達したとき、ダンパー取付孔13L,13Rの位置に関連して動作するエンジンルーム内締付ロボット6のエンドエフェクタ61の位置を測定し、測定した位置からダンパー取付孔の位置を算出し、算出した位置を下廻り締付・ダンパー挿入ロボットに伝送し、伝送された位置に応じてダンパーをダンパー取付孔に位置合わせする。
(もっと読む)
搬送装置及び搬送方法
【課題】等間隔に配列された複数のワークを、不等間隔に供給できる搬送装置を提供すること。
【解決手段】搬送装置1は、等間隔に配列された複数のワークWを把持して搬送し、任意の間隔で供給パレット7に供給し、ワークWを把持する第1把持部11、第2把持部12、第3把持部13及び第4把持部14と、これら第1把持部11〜第4把持部14が連接された把持基体部20と、を備え、把持基体部20は、第1把持部11〜第4把持部14をワークWの配列方向に相互に近接、離間させる第1摺動部210、第2摺動部220、第3摺動部230及び第4摺動部240を備え、第1把持部11〜第4把持部14は、それぞれ別個にワークWと係脱する第1係合部110a及び第2係合部110b、第1係合部120a及び第2係合部120b、第1係合部130a及び第2係合部130b、第1係合部140a及び第2係合部140bを備える。
(もっと読む)
搬送ハンド
【課題】中央部分が中空のワークであっても、確実に搬送できるとともに、設備を簡素化できる搬送ハンドを提供すること。
【解決手段】第1把持部11、第2把持部12、第3把持部13及び第4把持部14は、複数のバルブガイドWa又はバルブシートWbを把持して搬送し、略半円形状の外壁101aと略半円形状の内壁101bを有する一対の把持手段101と、一対の把持手段101を相互に近接又は離間させる押圧手段102と、を備え、これら一対の把持手段101は、押圧手段102により近接されることで内壁101bによってバルブガイドWaを把持し又は押圧手段102により離間されることで外壁101aによってバルブシートWbを把持し、複数のバルブガイドWa又はバルブシートWbの配列方向に沿って、複数連接されている。
(もっと読む)
ロボットセル
【課題】複数のロボットステーションを組み合わせて構築したロボットセルにおいて、各ロボットステーションのスペース効率の改善、タクトの向上、ロボットステーション内の機材の使用効率の改善を目的とする。
【解決手段】ロボットステーションは、一対のロボットアーム101,102と、ロボットアームのワークスペースに対して撮像面を平行に撮像手段を固定するブース104を備える。撮像手段としてのカメラ106の視野を、隣接するロボットステーションのワークスペースである架台の天盤103aまで広げる。さらに、各ロボットステーションに搭載されるロボットアームの可動範囲を、隣接するロボットステーションのワークスペース内に広げる。
(もっと読む)
部品組み付け装置及び機械部品の製造方法
【課題】エア源を使用することなく、部品を組み付けることが可能な部品組み付け装置及び機械部品の製造方法を提供する。
【解決手段】第1のアーム12aの先端部に第1のハンド51aを有し、第1のハンド51aを用いて第1の部品を保持する第1のロボット11aと、第2のアーム12bの先端部に第2のハンド51bを有し、第2のハンド51bを用いて第1の部品に組み付けられる第2の部品を保持する第2のロボット11bと、を備え、第1のハンド51bは、第1の部品又は第2の部品を上方から押さえる押さえ部材74を有し、第2のハンド51bは、第2の部品に形成された孔に挿入され、第2の部品を保持する支持ピン55、56を有する。
(もっと読む)
シミュレーションシステムおよびそのためのシミュレーションプログラム
【課題】本発明は、作業ロボットが行う作業に求められる作業精度を満たす精度で、取得した画像データから作業対象物の3次元位置・姿勢認識を行い、作業ロボットが当該作業を適切に行うようシミュレーションすることが可能なシミュレーションシステムおよびそのためのシミュレーションプログラムの提供を目的とする。
【解決手段】本発明にかかるシミュレーションシステムは、撮像部20、特に第2撮像部22の倍率設定、フォーカス設定等の撮像パラメータを制御し、作業に要求される作業精度を満たす解像度で画像データを取得することにより、作業対象物10自体の大きさや、作業対象物10と撮像部20との距離に影響されて解像度が低下することを防ぎ、作業対象物10に対する必要な3次元位置・姿勢認識精度を維持することができるので、シミュレーションおよび現実の作業において作業効率の低下や、作業の失敗確率の増大を招くことを抑制できる。
(もっと読む)
ハンド及びロボット
【課題】把持したボルトをタップ穴に挿入することが可能なハンド及びロボットを提供する。
【解決手段】ハンド20は、1対の支持部22a、22bと、1対の支持部22a、22bの内側にそれぞれ支持され、ボルトBを把持する第1及び第2の把持爪21a、21bと、第1及び第2の把持爪21a、21bを各支持部22a、22bの長手方向と交差する揺動軸回りに揺動させ、第1及び第2把持爪21a、21bの先端の向きを変更させる揺動機構29と、第1及び第2の把持爪21a、21bが把持したボルトBをボルトBの軸回りに回転させるボルト回転機構30とを備える。
(もっと読む)
投影面情報提示装置と方法
【課題】ロボットハンドと対象物との相対位置誤差を拡大表示することができ、これにより目視かつ手動操作によりロボットハンドを対象物に対して正確に位置決めすることができる投影面情報提示装置と方法を提供する。
【解決手段】 ロボットハンド12に設けられたプロジェクタ22により、原パターンAを対象物2に固定された投射面3上に投射し(S1)、ロボットハンド12に設けられたカメラ24により、投射された原パターンである投射パターンBを撮影し(S2)、撮影した投射パターンである撮影パターンCを、ロボットハンド12が対象物2に対し予め設定した位置と姿勢をとる基準位置において、原パターンAと一致するように変形し(S3)、変形した変形パターンDを原パターンAに重畳する(S5)。(S1)〜(S5)を順に繰り返す。
(もっと読む)
物体把持システム、物体把持方法、プログラム、およびロボットシステム
【課題】物体の把持を行う場合に、後工程で必要とされる物体上の把持位置または相対姿勢への変更を考慮して物体を把持する。
【解決手段】1または2以上の対象物体を撮像した画像に基づいて1または2以上の対象物体の位置姿勢を計測する位置姿勢計測部と、位置姿勢に基づいて1または2以上の把持可能な対象物体を選択する選択部と、選択された1または2以上の把持可能な対象物体から、把持位置または把持方向を含む状態ごとに予め定められた優先度に従って、最も優先度が高い状態で把持可能な対象物体を把持物体として決定する決定部と、決定された把持物体を最も優先度が高い状態で把持する把持部と、把持されている把持物体の状態を、把持物体を他の物体に対して組み付ける際の状態に変更する変更部と、を備える。
(もっと読む)
作業システム、作業ロボット制御装置および作業プログラム
【課題】各トレイ上の部品の位置等が変更されても、効率的にその部品を認識して作業動作を実行できる作業システムを提供することを目的とする。
【解決手段】この作業システムは、移動可能に配置された複数のトレイ4を、低空間分解能・広視野の画像上で認識した後、高空間分解能・狭視野の画像処理を行うことで、トレイ4に載置される部品3を特定し、トレイ4の配置位置を認識する。トレイ認識段階では低空間分解能であるため大量の画像処理を必要とせず、また部品認識段階では狭視野であるため大量の画像処理を必要としない。よって、当該トレイ4に載置される部品3の3次元位置・姿勢を効率的に認識できる。この2段階の画像認識によって、作業ロボット2による作業動作を効率的に行うことができる。
(もっと読む)
ワーク把持装置およびワーク把持方法
【課題】互いに隣接しつつこの隣接する方向に対して交差する方向にずれた位置にある複数のワークであっても容易に把持できるようにする。
【解決手段】ワーク把持装置1は、4つのワーク把持ユニット5,7,9,11により4つの部品13,15,17,19をそれぞれ個別に把持する。部品13,15の上に部品17,19が載せられる。部品13,15を把持するワーク把持ユニット5,7は、上下シリンダ27,27Aを備えており、下端のアーム37,37Aが把持フレーム3に対して上下動可能である。4つのワーク把持ユニット5,7,9,11で4つの部品13,15,17,19を把持した状態で、ワーク把持装置1全体を上昇させると、上下シリンダ27,27Aが伸長して部品13,15が部品17,19に対して下方に離間した位置関係となる。
(もっと読む)
移載ハンドおよび移載方法
【課題】ワークのクリップ等への嵌め込みや挿入において、位置決め誤差、ワーク誤差を吸収し、クリップ力に負けず確実に嵌め込むことができる移載ハンドを提供する。
【解決手段】ワークをターゲットに嵌め込む移載ハンド100において、前記ワークを保持する保持部1と前記保持部を移動可能な状態で支持するガイド部3と前記保持部を移動可能方向に加圧する加圧バネ3bと前記ガイド部を回転可能な状態で支持する回転支持部4を備えていることを特徴とする。
(もっと読む)
1 - 20 / 138
[ Back to top ]